大阪大学産業科学研究所
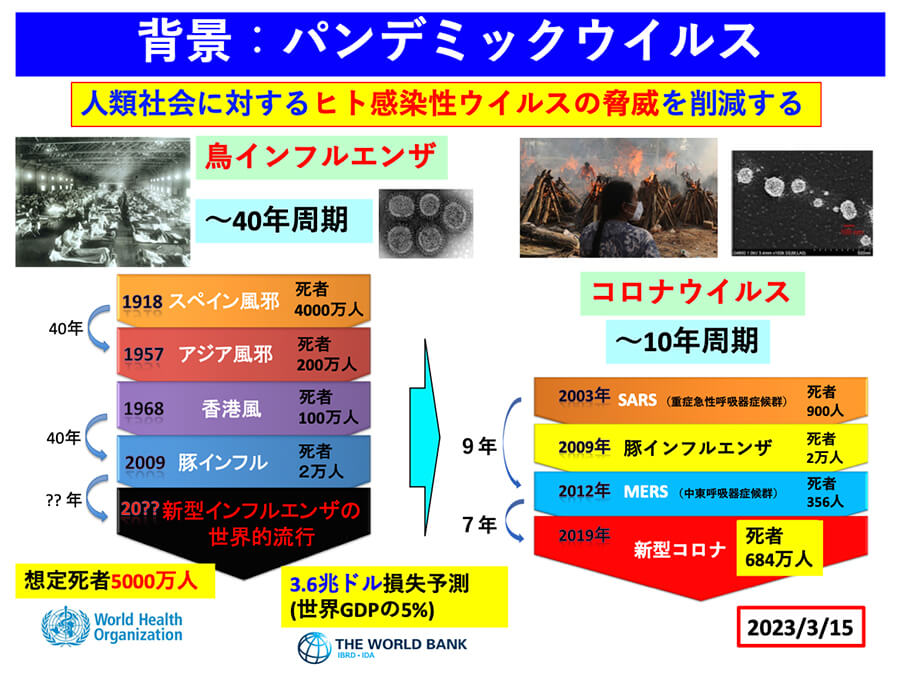
◇背景・概要 近年の新型コロナウイルスのパンデミックは記憶に新しいものがある。従来、パンデミックと言えば、高病原性の鳥インフルエンザウイルスに起因するもので、図1に示す100年前のスペイン風邪に始まり、アジア風邪、香港風邪と多くの犠牲者を払ってきている。これらは〜40年近い周期で生じていた。ところがコロナウイルスのパンデミックは、2003年のSARSに始まり、MERS、今回の新型コロナウイルスと10年以内の周期で次々とパンデミックが生じていることがわかる。これは我々の日常生活にとって極めて高い脅威となるものである。
図1. 鳥インフルエンザウイルスとコロナウイルスによるパンデミックの歴史。
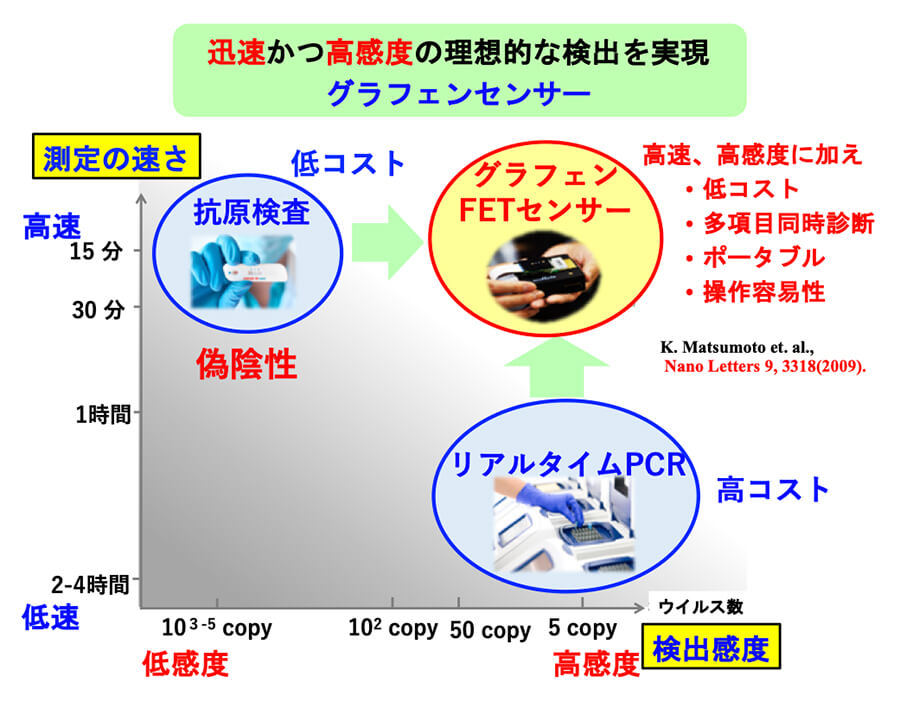
これらパンデミックを防ぐには、迅速、高感度なウイルス検出技術が必要不可欠である。すでに様々な検出技術があるが一長一短の感がある。図2に示すように、PCRは極めて高感度であるが、検査時間が〜1時間以上と長く、かつ高額で、専門の検査技師が必要である。またイムノクロマトを用いた抗原検査キットは安価でわずか15分で検査でき、素人でも可能な簡便さであるが、感度が不十分であり、新型コロナウイルスの検査でも問題になったように、偽陰性、偽陽性の結果を出してしまうことがあり、信頼性にかける。本研究では、グラフェンFETの高感度特性を利用し、高感度であり、かつ高速、簡便に計測できるシステムを開発する。
図2. グラフェンFETを用いたウイルスセンサの位置付け。PCR検査は高感度であるが検査時間が長時間必要であり、高額である。抗原検査は短時間、簡便であるが、感度が不十分である。グラフェンFETセンサは、高感度、高速で、かつ簡便にウイルスを検出可能である。
◇グラフェンFETセンサによるウイルス検出
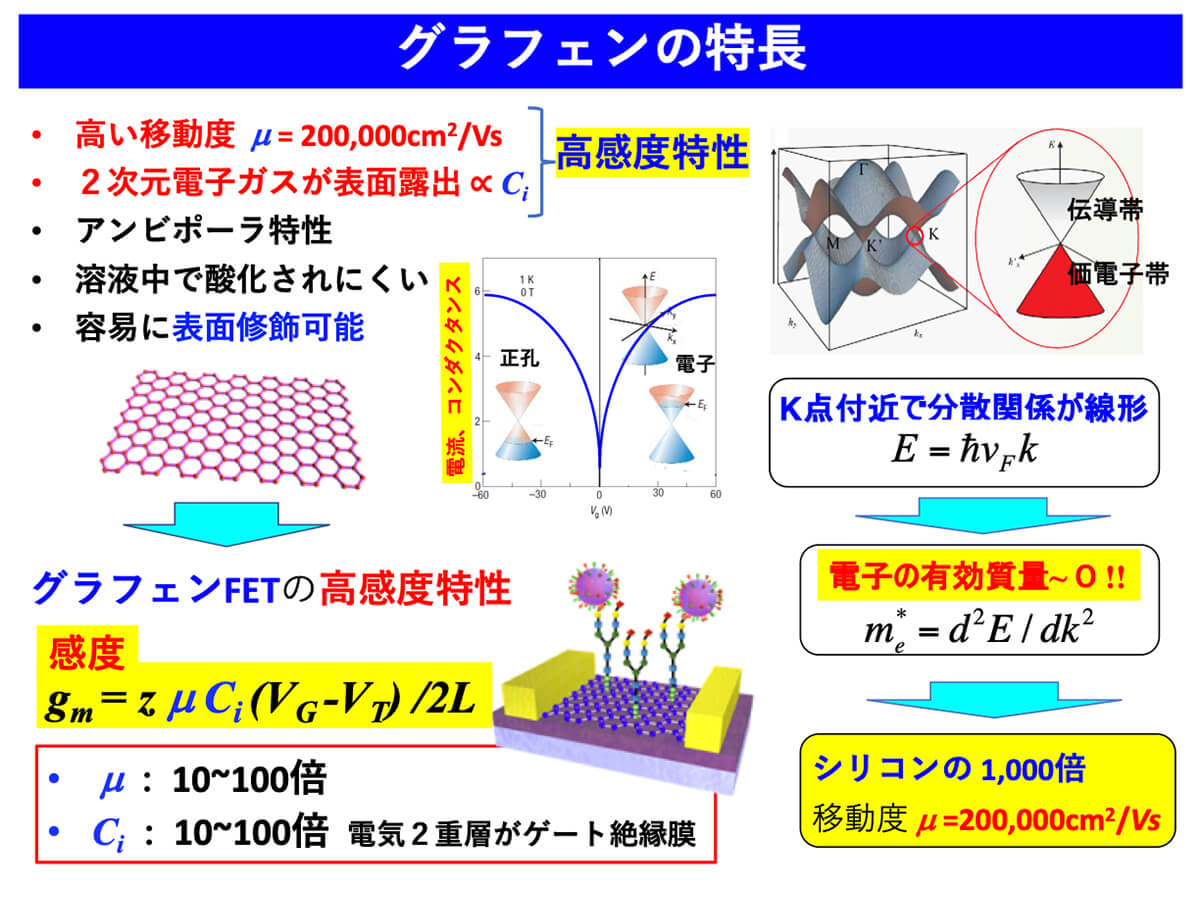
図3にグラフェンの特長を示す。グラフェンは、伝導体と価電子帯が線形の分散関係を示す特殊な半導体であり、その有効質量はほぼ0に近い。その為、従来のシリコン半導体の移動度の1000倍近い200,000cm2 /Vsという驚くべき実験結果が示されている。またグラフェンの表面にはπ電子で形成される2次元電子ガス(電子が海のように広がっている)が表面に露出している。その為、グラフェンの表面に電荷を有するものが近づくとグラフェンの電気特性が大きく変化する為、高感度が得られる。図3に示すように、グラフェンの表面にウイルスを選択的に補足するレセプター(抗体や糖鎖)を修飾し、電荷を持ったウイルスが溶液中でレセプターに捕捉されると、ウイルスの電荷によりグラフェンの電気特性(ドレイン電流やディラックポイント)が変化する。この変化によりウイルス検出する。
図3. グラフェンの特長。伝導体と価電子帯が線形の分散関係を示す為、有効質量が小さく移動度が極めて高い。
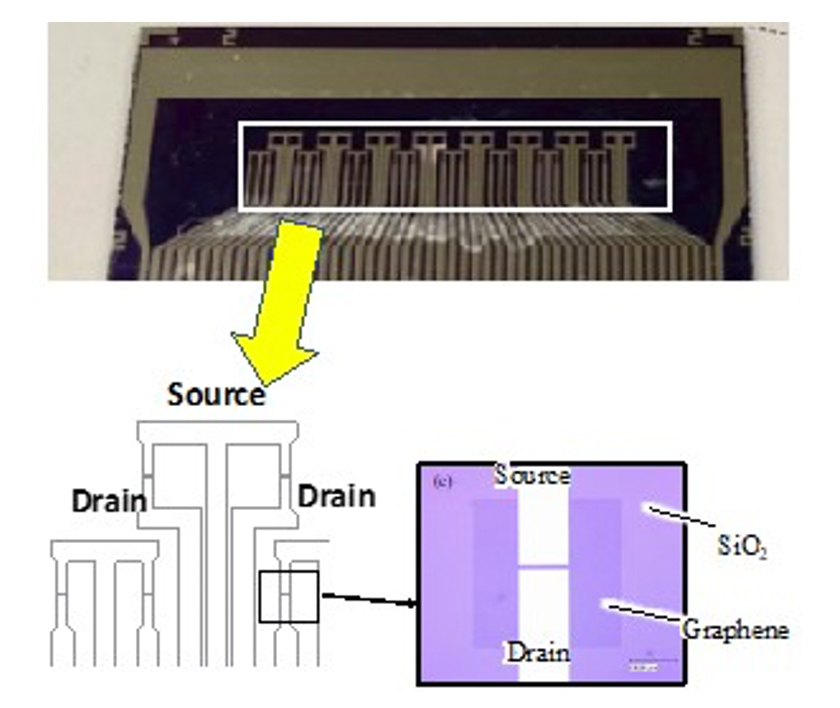
図4はSi/SiO2 基板上に集積された32個のグラフェンFETの光学写真である。その模式図と一個の拡大したグラフェンFETの写真を示す。FETのチャネル長は10μm、チャネル幅は100μmである。このFETアレイの左側半分には抗体を修飾してウイルスを選択的に検出し、FETアレイの右側半分は抗体を修飾しない参照FETとした。
図4. 32個の集積したグラフェンFETアレイとその模式図、および一つのグラフェンFETの拡大図。
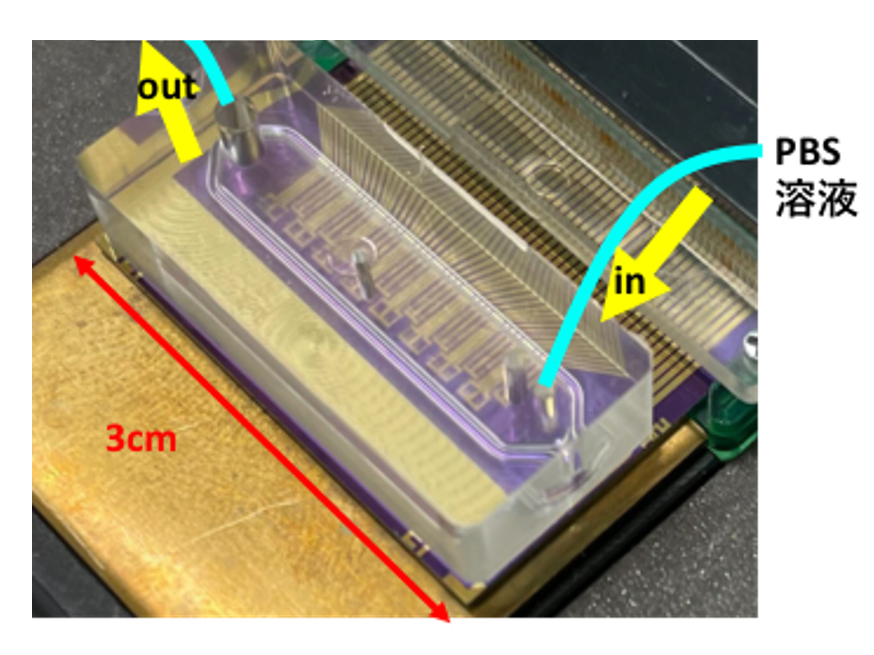
図5. グラフェンFETアレイ上に設置したマイクロ流路(μ-TAS)。右側からPBSを導入し、グラフェンFETアレイ上を通過して、左側から排出する。
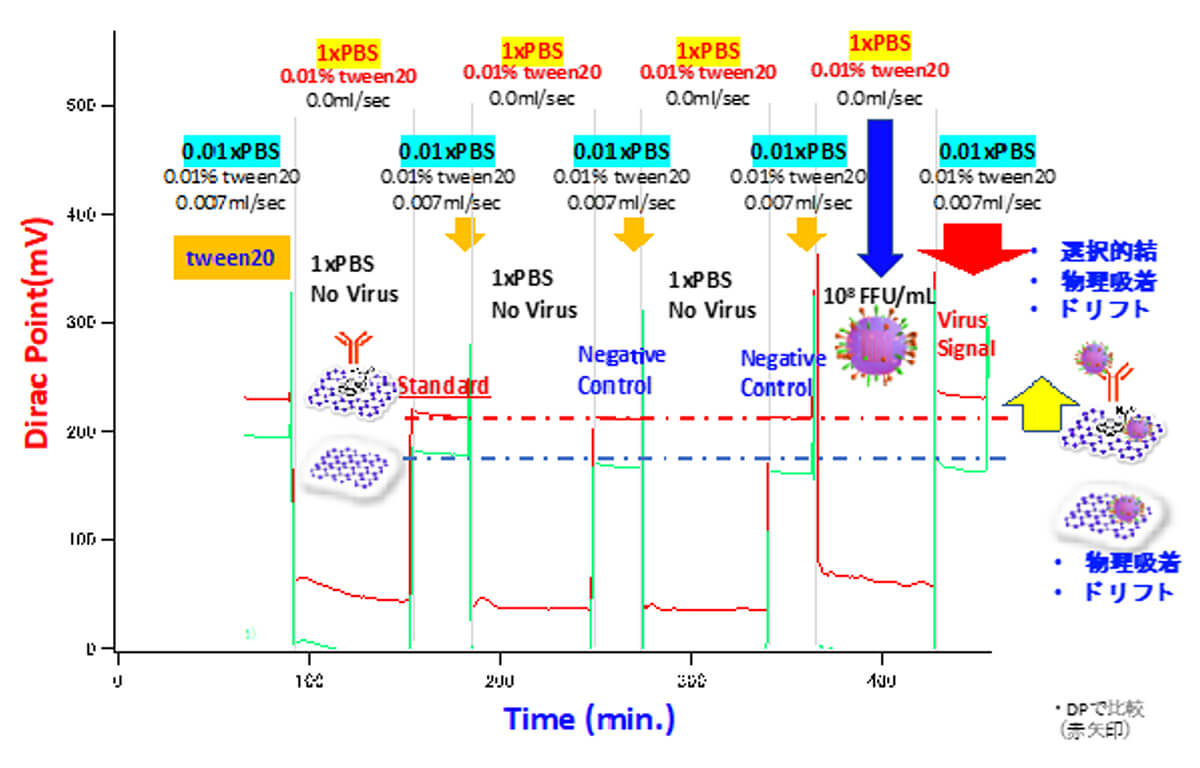
上記に示すマイクロ流路測定システムを用いて図6に示す新型コロナウイルスの計測を行った。グラフェンFETアレイの左側13個のFETにはPBASE (1-Pyrenebutyric acid N-hydroxy-succinimide ester)を介して新型コロナウイルス(SARS-CoV-2)のスパイク抗体が修飾され、図6で赤いラインがその13個のFETのディラックポイントの平均値を示す。またグラフェンFETアレイの右側13個のFETには抗体を修飾せず、参照FETとし、図6で緑のラインがその13個のFETのディラックポイントの平均値を示す。赤と緑のディラックポイントの差はグラフェンに修飾された抗体とPBASEの電荷によるものである。ウイルスは抗体と体内の生理食塩水濃度である1xPBS(150mM)でもっともよく抗体と結合する。しかし1xPBSにおけるデバイ長は0.7nmであり、抗体の~10nmのサイズよりはるかに小さい。このため1xPBSにおいては、ウイルスが抗体に結合してもウイルスの電荷は電気2重層の電荷により遮蔽されて検出することができない。そこで我々は電荷を検出する際はPBS溶液を0.01xPBSに交換し、デバイ長を7nmと延伸させることにより、ウイルスの電荷をグラフェンFETで検出することに成功した。この溶液交換法を用いて新型コロナウイルスを計測したのが図6である。Tween20によるブロッキングの後、ウイルスの入っていない1xPBS溶液を2回導入している。これは溶液交換により、ディラックポイントに変動が生じないかを確認するものである。図6からわかるように溶液交換によるディラックポイントの変動は極めて小さいと結論づけられた。1×108 FFU/mLの濃度の新型コロナウイルスを含む1xPBS溶液を導入後、0.01xPBS溶液を導入してディラックポイントの変化を測定すると、図6右端の黄矢印に示すように、基準値を示す赤の一点鎖線よりディラックポイントが上むきに変化していることがわかる。これが新型コロナウイルスの電荷を検出した結果である。この変化について以下に詳細に検討する。
図6. マイクロ流路測定システムを用いて計測した新型コロナウイルスの測定結果。
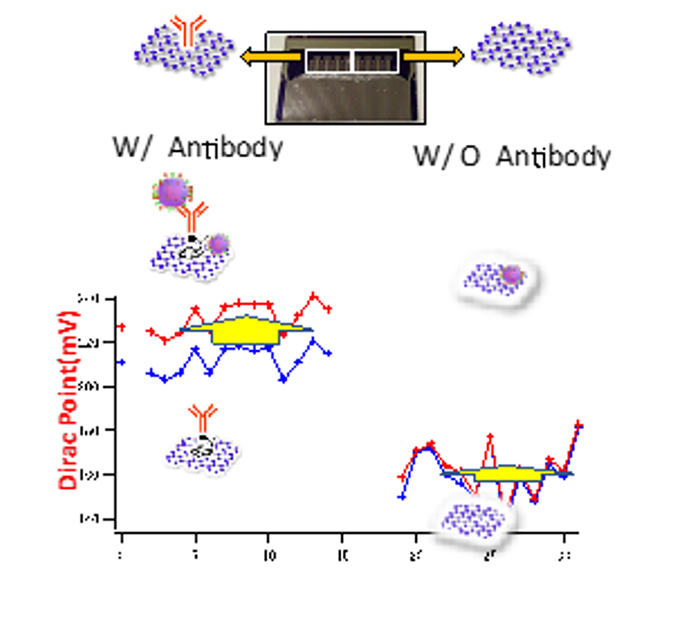
図6の特性は13個のFETの平均値を示したものである。これらの個々のFETのディラックポイントの分布を詳細に解析する。図7は抗体の修飾されたグラフェンFET(左側)と抗体の修飾されていないグラフェンFET(右側)のそれぞれのディラックポイントの分布を示す。横軸はFETのナンバーリングである。青いラインは新型コロナウイルス導入前、赤いラインは導入後の値である。ウイルス導入前のディラックポイントは、抗体のある、無しで~40mV前後の差がある。これは抗体の電荷によるものと考えられる。ウイルス導入後、抗体のある領域ではディラックポイントは〜20mV近く大きく増加する。これに対して抗体のない領域は、ほとんど変化しないことがわかる。この両者のディラックポイントの変化分Δ V DP 図8に示す。
図7. 抗体を修飾したグラフェンFET(左側)と抗体の修飾していないグラフェンFET(右側)のディラックポイントの分布。青はウイルス導入前、赤はウイルス導入後である。
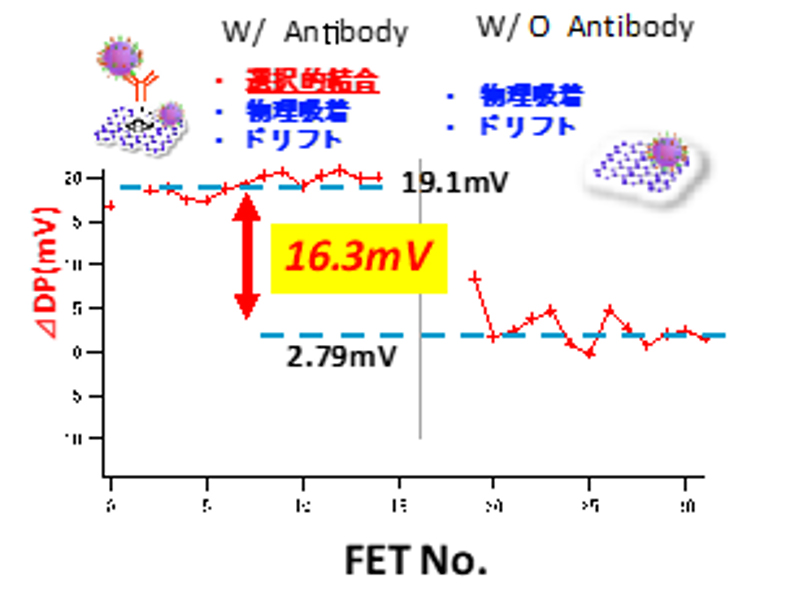
図8. 新型コロナウイルス導入による抗体修飾したFETとしないFETのデイラックポイントの変化。
図8の左側は抗体を修飾したもの、右側は抗体を修飾していないものである。抗体を修飾したFETではウイルスの導入前後で平均Δ V DP =19.1mVの大きなディラックポイントの変化が得られている。この変化は、抗体に選択的に結合したウイルスと、グラフェン上に物理吸着したウイルス、およびベースラインのドリフトに由来する。これに対して抗体を修飾していないFETでは平均Δ V DP =2.79mVの極めて小さな変化が生じた。この変化はグラフェン上に物理吸着したウイルス、およびベースラインのドリフトに由来する。したがってこれら二つのディラックポイントの変化分の差19.1mV-2.79mV=16.3mVは、ドリフトや物理吸着の影響を除いた、抗体に結合した新型コロナウイルスの電荷にのみよる変化であると結論づけられる。以上のように、参照FETによる信号を差し引くことにより、極めて正確に抗体に結合したウイルスの電荷のみを測定する手法を確立した。
次回に続く-
【著者紹介】 松本 和彦(まつもと かずひこ)
■略歴
昭56.3 東京工業大学大学院博士課程電子物理工学専攻修了 工学博士 昭56.4 電子技術総合研究所 昭63〜平2 スタンフォード大学電気工学科 客員研究員 平 5.7 電子デバイス部 微構造エレクトロニクス研究室 室長 平13.4 産業技術総合研究所 総括研究員 平15.3 大阪大学 産業科学研究所 教授 平24.4〜26.3 大阪大学 産業科学研究所副所長 平25.10〜 大阪大学COI研究推進機構 副機構長・研究統括リーダー 平30.3 大阪大学定年退官、名誉教授、特任教授
■受賞
(1)平成 8年度 科学技術庁長官賞 研究功績者表彰 (2)平成 8年度 国際固体素子材料コンファレンス 最優秀論文賞 (3)平成10年度 第30回 市村学術賞 功績賞 (4)平成10年度 第57回 科学技術庁 注目発明選定 (5)平成11年度 第12回 工業技術院長賞 (6)平成13年度 国際固体素子材料コンファレンス 最優秀論文賞 (7)平成20年度 応用物理学会フェロー表彰 (8)平成23年 Micro Nano Process Conference 2010 Award Outstanding Paper (9)平成24年 Micro Nano Process Conference 2011 Award Outstanding Paper (10)平成25年, 26年, 27年 大阪大学総長表彰
(一社)日本ROV協会
1.はじめに
わが国では2007年に「超高齢社会(総人口の21%が65歳以上)」へ突入し、現在も先進諸国と比較して最も高い水準の高齢化率(29.1%:令和5年10月1日現在、内閣府 令和6年版高齢社会白書より)となっている。これは65歳以上の人口にして3,623万人である。これを受け、港湾工事においてはi-Constructionの推進により、施工の省力化、機械化、自動化が図られている。
2.水中インフラが抱える課題
2.1.水中インフラの老朽化
そもそも水中インフラとは、港湾設備やダム、河川などに架けられた橋梁、各種水道や発電設備、海底ケーブルなど水中に設置されている設備を指す。今後は洋上風力発電設備もこれらに加わることとなり、今後ますます重要視される分野と思われる。
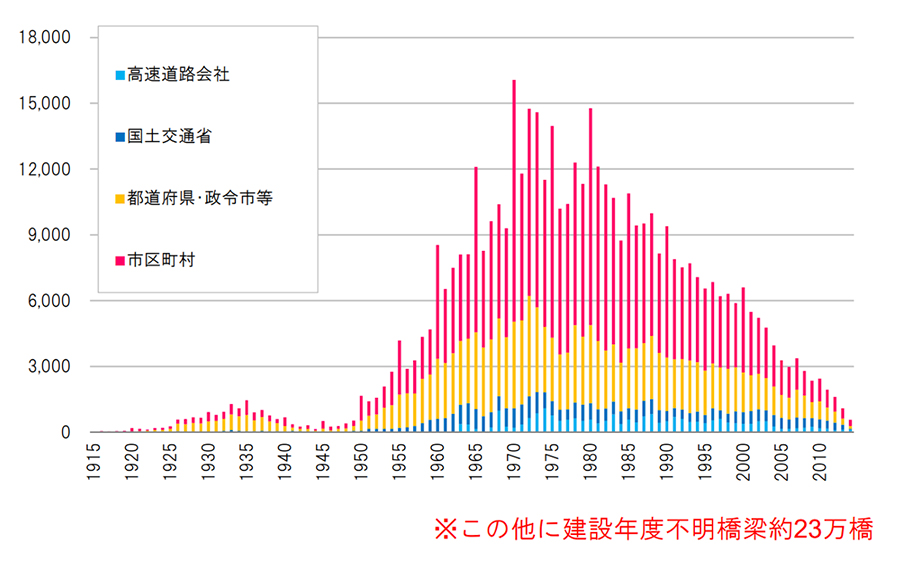
図1:建設年度別橋梁数(令和2年版国土交通白書)
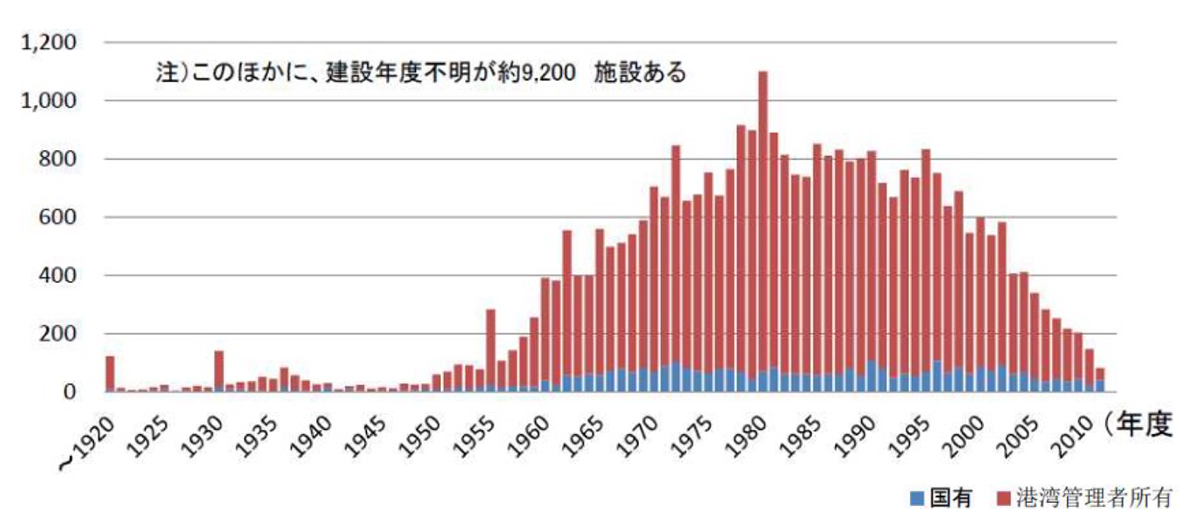
図2:建設年度別港湾施設数(令和2年版国土交通白書)
これらのデータから、橋梁は陸上のものを含め、建設後50年経過したものが2029年には52%に到達し、港湾施設は2024年現在ですでに30%以上となっている。一方で、特に橋梁に関しては9割以上のものが地方公共団体によって管理されており、予算的に容易に架け替えることが不可能な状態となっている。そのため、点検を実施して劣化の進行度合を判定し、優先順位を付けて補修をする水中インフラ維持管理が重要となっている。
2.2.水中インフラへの打撃
前項の老朽化に加え、昨今の地震や台風、ゲリラ豪雨などの災害が頻発化、激甚化の傾向にある。特に台風は以前に比べ、地球温暖化による海面水温の上昇により日本近海で発生し、また大型なものが増えてきた。これにより台風への準備期間が短く、また大雨や風により水中インフラに深刻なダメージをもたらしている。以下に土砂災害の発生件数の推移を示す。
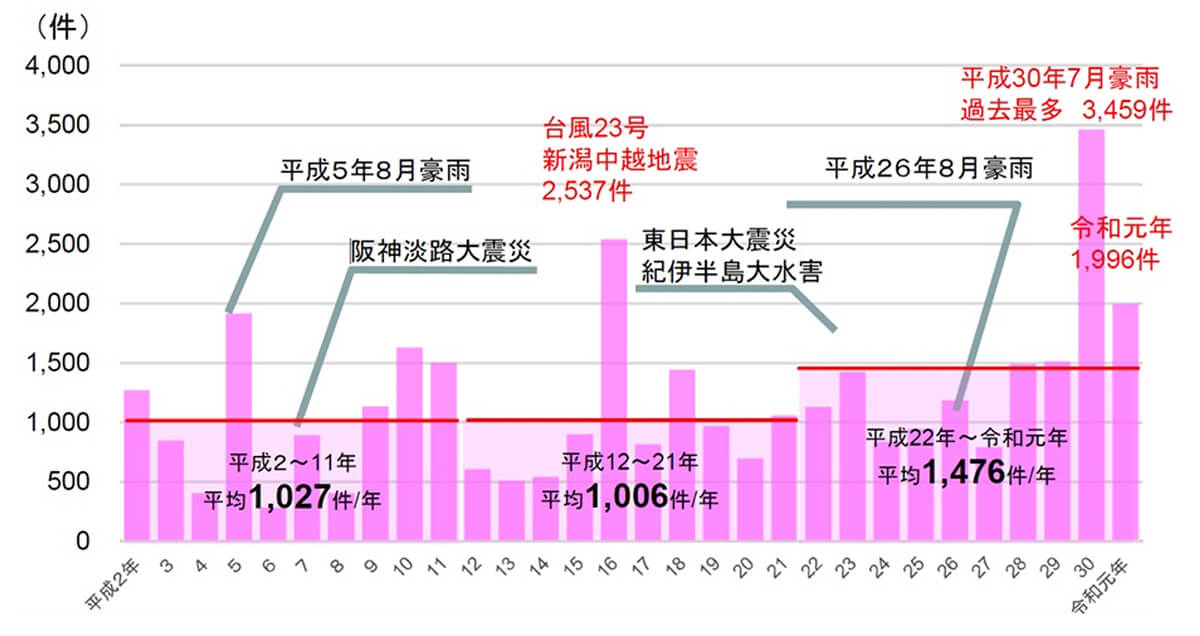
図3:土砂災害の発生件数の推移(令和2年版国土交通白書)
上図の平成12年から21年と平成22年から令和元年で比べると、土砂災害件数が約1.5倍に増えていることがわかる。老朽化を迎えている水中インフラに昨今の災害によるダメージがいかに深刻か見て取れる。水中インフラの事故事例について次項にて説明する。
2.3.明治用水頭首工漏水事故
令和4年5月15日、愛知県豊田市を流れる矢作川の取水施設「明治用水頭首工」左岸側において大規模な漏水事故が発生した。原因は堰の下、地中に水の通り道が作られる「パイピング現象」によるものとされ、これは施設の老朽化などによるものと結論付けられた。これにより農業用水や工業用水の取水が一時制限され、時期的に稲作への被害や周辺の自動車関連工場の一時操業停止などの被害をもたらした。さらに、魚道の水位低下によりアユの遡上ができなくなるなどの生態系まで影響が広がった。
図4:明治用水頭首工(東海農政局)
当初、令和7年度中に取水施設の土台部分をコンクリートにしたうえで、水門の柱を立て直す工事などを完了させる見込みであった。しかし、所管の農林水産省は令和6年6月に右岸側も対策が必要だとして水が取水施設の下を通り抜けないよう板を設置する追加工事を決定した。右岸側の工事は令和8年10月から開始され、工期は令和9年度中まで延長となった。
2.4.超高齢社会「日本」
冒頭に記載した高齢化に関するデータを以下に示す。
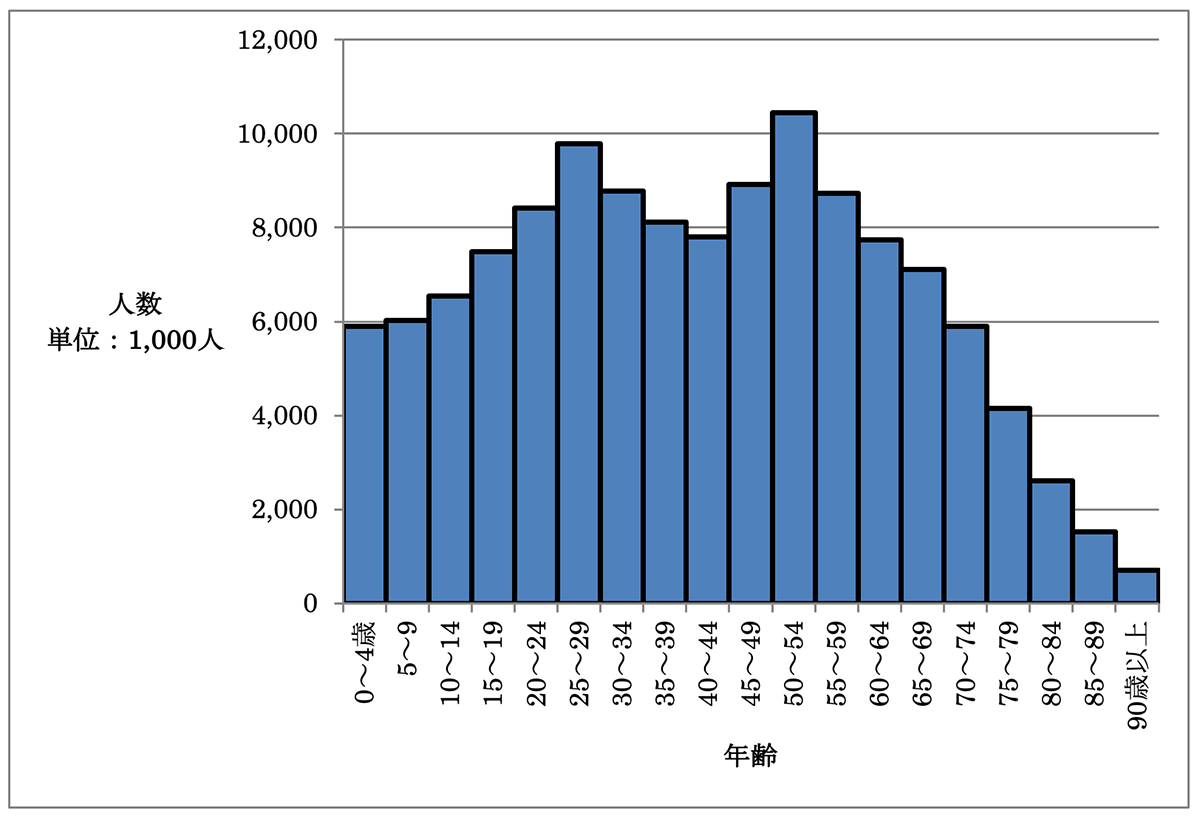
図5:平成12年度年齢5歳階級別人口(総務省統計局 5歳階級別人口より作成)
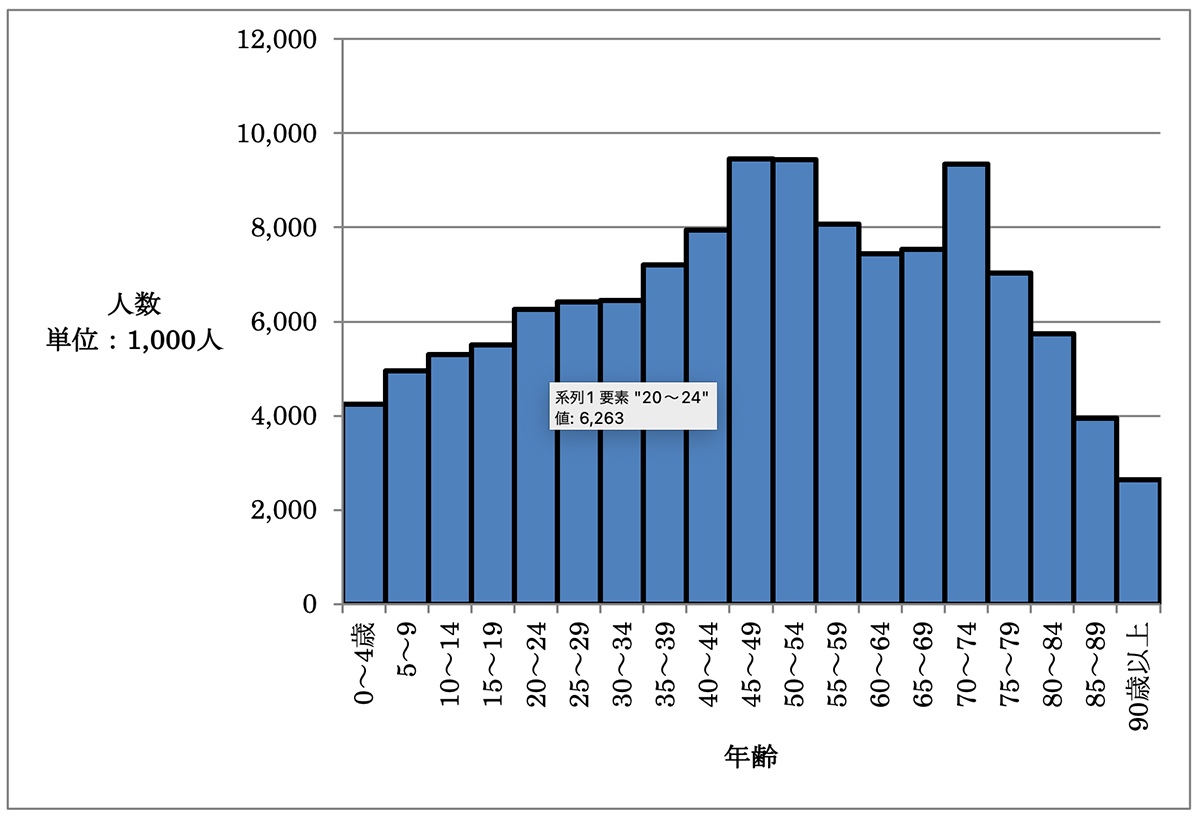
図6:令和4年度年齢5歳階級別人口(総務省統計局 5歳階級別人口より作成)
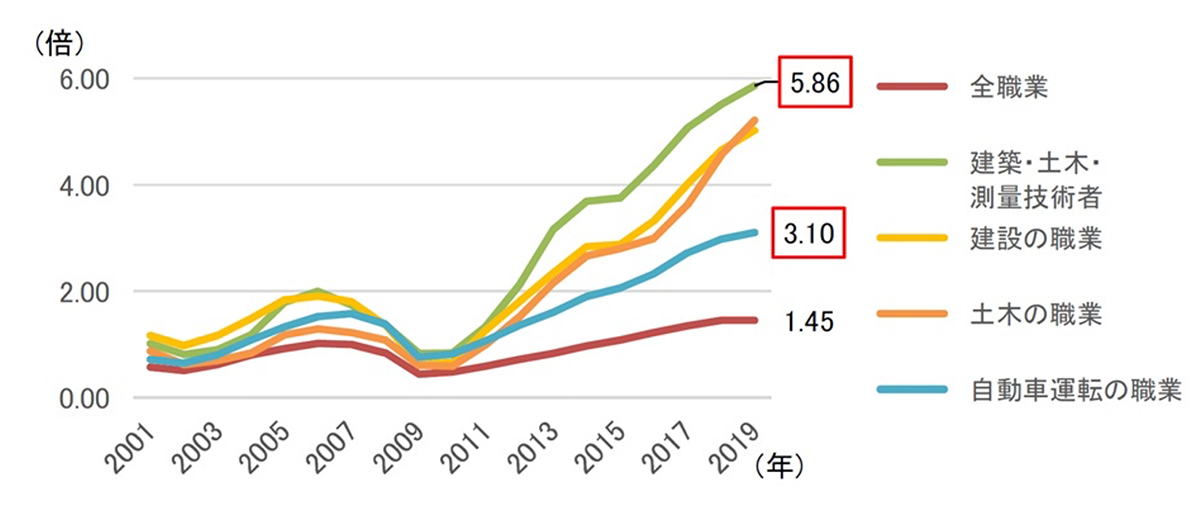
図4の50-54歳のピークは第1次ベビーブーム(団塊の世代)で、25-29歳のピークは第2次ベビーブーム(団塊ジュニア世代)を示している。図5はその22年後となる令和4年度のデータで、第1次ベビーブームの世代の殆どが定年退職を迎える一方で若年層に第2次ベビーブーム以降のピークはなく、労働者は減少の一途を辿っている。そのため、有効求人倍率(図6、表1)は高止まりを見せており、省力化、機械化、自動化による生産性の向上が喫緊の課題となっている。
図7:有効求人倍率の推移(令和2年版国土交通白書)
表1:令和6年7月度有効求人倍率
職業
有効求人倍率
全職業
1.25
建築・土木・測量技術者
6.58
建設・採掘従事者
5.65
自動車運転従事者
2.72
※パート除く
次回に続く-
参考文献
浦環・髙川真一(1997)「海中ロボット」成山堂書店
佐藤友亮・高木圭太・魚谷利仁(2021)「ROV技能認定 ROV分類Class1準拠テキスト」日本ROV協会
【著者紹介】 佐藤 友亮(さとう ゆうすけ)
■著者略歴
2011年 明治大学理工学部物理学科卒業 2011年 株式会社東陽テクニカ入社 2019年 日本海洋株式会社入社 2021年 一般社団法人日本ROV協会設立 2022年 株式会社水龍堂設立 2024年 一般社団法人日本ROV協会 代表理事就任 2024年 株式会社UMINeCo 設立
現在に至る
キヤノンは、監視・産業・医療用CMOSセンサの新製品として、1/1.8型で有効画素数約212万画素(1,936×1,096)の“LI7070SAC(カラー)/LI7070SAM(モノクロ)”を2024年10月31日に発売した。明暗差の大きい環境でのハイダイナミックレンジ撮影、暗所での低照度撮影に加え、近年需要が拡大する近赤外線域の高感度撮影も可能にし、監視カメラ・産業用カメラの多様化するニーズに応えるとのこと。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000001057.000013980.html
自動運転の民主化をビジョンに掲げる(株)ティアフォーは、2023年10月のGLP ALFALINK相模原での認可の取得に続き、長野県塩尻市の一般道において運転者を必要としない自動運転システム「レベル4」の認可を取得した。歩行者と一般車両が混在する環境下の一般道において、車両最大時速35kmでの走行によるレベル4認可は全国で初めてとなる。なお、今回の道路運送車両法に基づく認可の対象は塩尻駅と塩尻市役所間の経路であるという。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000080.000040119.html
・最新の実績あるMeters and MoreおよびPRIME1.4規格を標準搭載したプログラマブル電力線通信(PLC)モデムがスマート・メータの柔軟な導入に貢献
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000001412.000001337.html
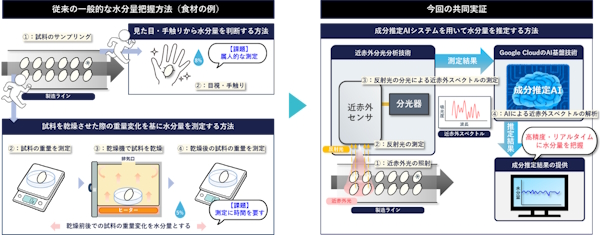
大阪ガス(株)と、グーグル・クラウド・ジャパン(同)〔以下「Google Cloud*1」〕は、製造業における製品の品質向上や生産性向上などを目的に、大阪ガスのセンシング技術*2に、Google CloudのAI基盤技術を活用した、物質内の成分を推定するAIシステムの開発に向けた共同実証を開始した。
プレスリリースサイト:https://www.osakagas.co.jp/company/press/pr2024/1783738_56470.html