
基礎工学研究科システム創成専攻
助教
小山 佳祐
5. フォトリフレクタ式
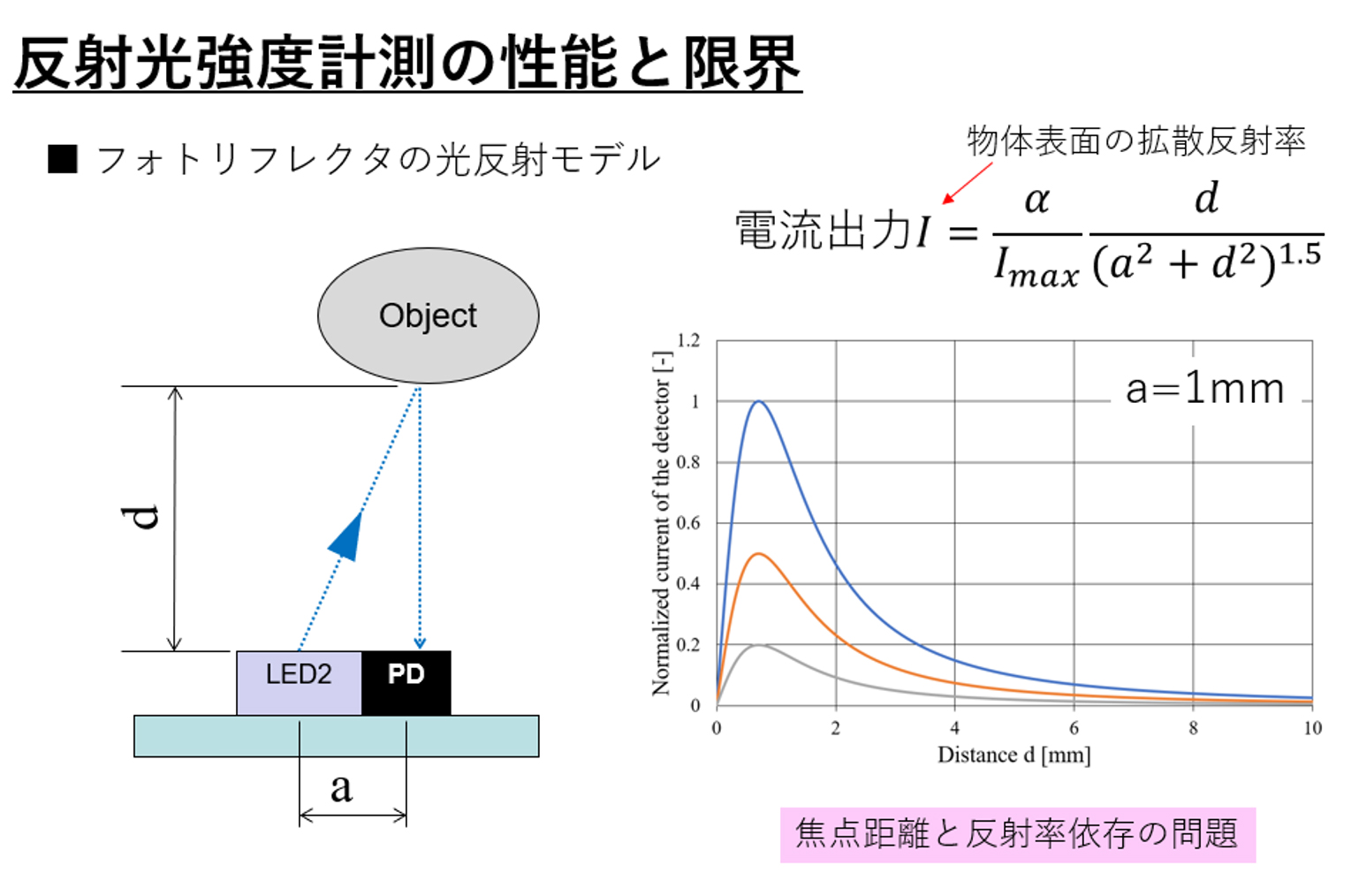
フォトリフレクタはLEDと受光部(フォトダイオードまたはフォトトランジスタ)がペアになった素子であり、物体面からの反射光強度を直接計測する素子である。2013年ごろまでは発光・受光素子のみでしか販売されていないことが多かったが、センサ素子の筐体内に発光・受光素子とAD変換・コントローラ部分が内蔵された製品も登場し、ロボット研究で利用しやすくなった。フォトリフレクタ式は数百マイクロ秒からミリ秒オーダで反射光強度を計測できることから、ロボットを正確な周期で高速制御する際に向いている。著者の研究グループもフォトリフレクタを使用した近接覚センサに関して10年以上、研究開発をしてきた[4]。過去にはロボットハンドの指先に多数のフォトリフレクタを配置してアレイ状の近接覚センサを開発した。また、各指の近接覚センサフィードバックにより、ロボットハンドの指先位置を対象物面に沿って自動的に調整する制御や、アーム手先位置も同時に調整する制御を実現した。
ただし、フォトリフレクタ式の場合、反射光強度を直接、ロボットの制御値に用いるため、対象物の光の反射率に依存して位置決めの目標値自体が変動する問題がある(図4)。この問題に関しては、移動中の近接覚センサ値を基に物体面の光の反射率を推定する手法や、衝突するまでの残り時間を推定する手法[5]などを提案してきた。しかし、適用可能な反射特性が拡散反射のみに限定されており、鏡面反射や透明物体は計測することができず、主にファクトリーオートメーションの現場需要に応えられない点が課題として残った。
6. AI処理を組み合わせたフォトリフレクタ式
フォトリフレクタの反射光情報から正確な距離情報を計測するためのキャリブレーション技術に関して、著者の研究グループが研究開発を行ってきた[6]。この中で、汎化性能の高い独自の機械学習モデルを用いることで、透明や鏡面物体を正確に計測する技術を開発した(図6)。これは代表的な鏡面反射物体、透明物体、拡散反射物体を用意し、フォトリフレクタの反射光強度データを収集、学習モデルを生成することにより、物体面の光の反射特性の影響を受けづらい測距機能を実現する技術である。2×2のフォトリフレクタアレイの反射光情報に対して独自の機械学習を適用することで、距離情報に加えて物体面の傾き角度も推定できる点が特徴である。2018年ごろまでは学習モデルのパラメータ調整や汎化性能が高いモデルを評価することが極めて困難であったが、Optunaやpyhessianなどの最適化・解析ツールが登場したことで研究開発が進んだ背景がある。本センシング技術を用いることで、透明な試験管やスマートフォンの画面といった、鏡面反射特性が強い物体に対して自動的にロボットの手先位置決めを行う動作が可能となった。
また、ハンド指先に搭載した柔軟な機構の変形量を近接覚センサで計測することにより、ばら積みされたねじを自動的にピッキングするシステムも実現した。これはヒトが目を閉じて指先で物体を探りながら把持を行う過程に着想を得たシステムであり、ハンド指先機構の変形量を基に指先のねじれ状態を解消する方向にアーム手先位置を調整し、ピックアップが容易な方向に移動する手法である。本センサ技術により、高速に動作しつつも手探りでロボットが位置決めを行う事が可能となってきた。
さらに、著者は本研究シーズを基に2022年に株式会社Thinkerを設立し、近接覚センサの販売とロボット開発事業を行っている。この中で、2Dカメラとの組み合わせによる薄型食品のピッキングロボットなどを開発しており、近接覚センサの社会実装に向けた取り組みも加速している。

7. おわりに
本稿では、ロボットハンドの手指における近接覚センシングに焦点を当て、代表的な検出原理を紹介し、著者の研究開発・社会実装に関して簡単に紹介した。
ヒトの作業を代替するロボット技術は学術的に魅力的な研究課題であると同時に、少子高齢化社会において必要不可欠な技術であると考えている。移動ロボットやコミュニケーションロボットはレーザ計測技術や機械学習の急速な発展に伴って著しく成長しているが、一方で、物体を掴んで操作するロボットマニピュレーションはまだまだ発展途上である。現時点では絶対的に強力な手法は存在せず、実用化・社会実装も遅れている。この一因として、ロボットハンドの手指感覚の欠如があり、ロボットハンドに適したセンシング手法を一から考え、研究開発することが近道であると考えている。近接覚センサは有望な候補の一つと捉えているが、触覚センサや力覚センサと比べて応用例はまだ決して多くない、更なる用途開拓が必要である。「ロボットに本当に必要なセンシングは何か?」、学術的な観点からだけでなく、有用性と技術的な限界に関して慎重に見極めていく必要があると考えている。
参考文献
- K. Koyama and M. Shimojo, A. Ming and M. Ishikawa, “Integrated control of a multiple-degree-of-freedom hand and arm using a reactive architecture based on high-speed proximity sensing” The International Journal of Robotics Research, Vol. 38, No. 14, pp.1717–1750, 2019.
- K. Koyama and Y. Suzuki, A. Ming, M. Shimojo, “Grasping control based on time-to-contact method for a robot hand equipped with proximity sensors on fingertips,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 504-510, 2015.
- 小山 佳祐, 高速・高精度近接覚センサの開発とロボットマニピュレーションへの応用, 日本ロボット学会誌, 2022, 40 巻, 5 号, p. 393-398, 2022.
【著者紹介】
小山 佳祐(こやま けいすけ)
大阪大学 基礎工学研究科システム創成専攻 助教
■著者略歴
2017年 電気通信大学大学院情報理工学研究科知能機械工学専攻博士課程修了(短期終了)。 2015-2017年 日本学術振興会特別研究員 (DC1)。 2017-2019年 東京大学大学院情報理工学系研究科特任助教。 2019年 大阪大学大学院基礎工学研究科助教、現在に至る。 2022年から株式会社Thinker取締役を兼務。 近接覚センサや多指ハンドに関する研究に従事。 計測自動制御学会、日本機械学会、日本ロボット学会会員。博士 (工学)。