
基礎工学研究科システム創成専攻
助教
小山 佳祐
1. はじめに
本稿では、ロボットハンド手指のセンシングに焦点を当て、計測技術を紹介し、人間の代わりに作業するロボットへの応用に関して解説する。
現在の一般的なロボットハンドは手指にセンシング機能を備えていないものが多い。これは、ロボットの作業空間内にヒトが存在しない前提で、単一種類の物体をつかむことに特化してきたことが一因である。特に、製造業において基本的な作業の一つであるピックアンドプレースでは、視覚センサで対象物の位置を認識し、アーム手先の位置決めを正確に行う事で作業を遂行してきた背景がある。
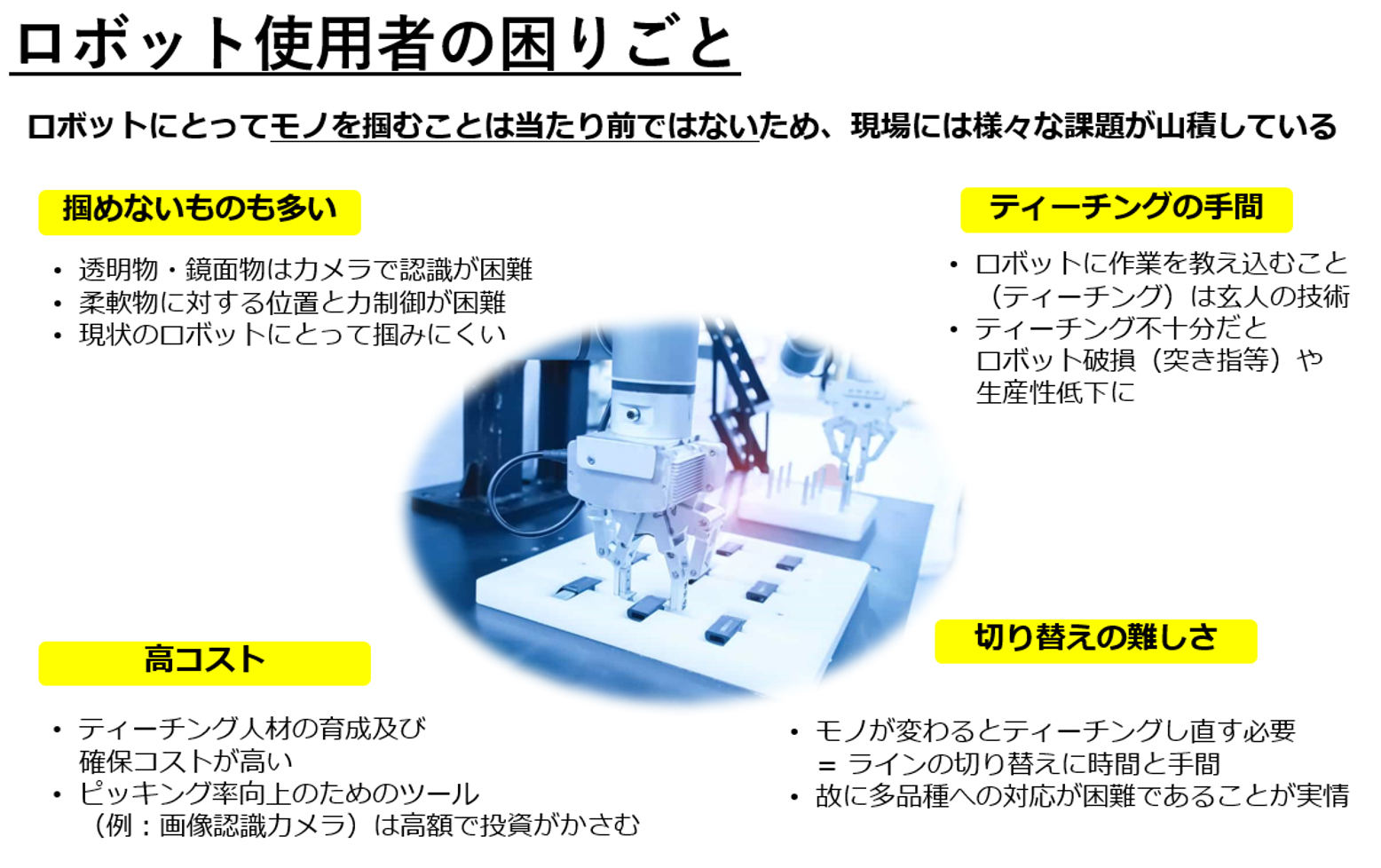
しかし、製造業において多品種少量生産の需要が高まり、さらに、人間と同じ作業空間で動作する協働ロボットが登場したことで、手指にセンシング機能がないことが問題になりつつある。不定形で柔軟、もしくは脆い食品を扱う作業や、工場内で少量多品種物体をピックする需要があるが、手指にセンシング機能を持たないロボットでは対応が難しく、自動化が進んでいない領域も多い(図1)。
また、今後、ヒトの生活環境下にロボットを進出させていくことを考えると、手指にセンシング機能を持たないロボットは安全面で懸念がある。例えば、2022年にはチェスを指すロボットアームが7歳の少年の指の骨を骨折させる痛ましい事故も起こっている。ヒトと協働で作業をするロボットやヒトと直接的に接触するリスクのある環境下では、視覚センサに情報欠落が生じやすく、従来のロボットシステムでは対応が難しい。これはロボット自身やヒトの体が視覚センサの計測範囲を遮る問題“オクルージョン”に起因する。物体近傍でロボットとヒト、あるいはロボットと物体間を直接的に計測するセンシング機能が必要であると考えられる。
製造業における更なる自動化を推し進める上でも、ヒトの生活環境下で共存するパートナーロボットを実現する上でも、手指のセンシング機能は重要である。
2. ロボットハンド手指用のセンサ開発
ロボットハンド手指のセンシング手法は大別すると触覚センサ、近接覚センサ、力覚センサがある。触覚センサと力覚センサは接触センシングであり、近接覚センサは光や電場、音波の反射を利用する非接触センシングである。
触覚センサに関しては、2015年ごろから小型の視覚センサで透明ゴムの変位を計測するタイプ(視触覚センサ)[1]が盛んに研究開発され、一部は実用化されている。視触覚センサは接触力の分布と物体のすべりを検知することができるため、油汚れなどで滑りやすい食器や、柔らかい食品を自動的にピックアップする工程で需要がある。ただし、テーブルやばら積みされた物体に対して高速かつ適応的に3次元的な位置決めを行う事が難しい課題がある。ロボットアームがヒトの腕のように小型軽量に構成されており、手先において高速な力のコントロールがしやすいシステムの場合は、触覚・力覚センシングは非常に有効であると考えられる。しかし、ロボットシステムは一般的に金属の塊であり、重量や慣性モーメントが大きい。ハンド手先や指先を高速に物体や環境に接触させつつ力のコントロールをすることを苦手とする。従って、ロボットアームに触覚センサや力覚センサを搭載し、力のコントロールを行わせる場合、衝撃力や接触時の振動を低減するためには、ロボットの動作速度を遅くせざるを得ず、作業効率が低下する。
一方、近接覚センサは非接触で物体位置を計測することから、ロボットの手先位置制御を高速化しやすく、かつ、位置決め動作中に物体を破損させる恐れがない点が利点である。近接覚センサは光や電場などをロボット表面から照射し、物体面からの反射量を計測することにより、物体表面とセンサ間の位置関係を算出する。
ロボットハンド指先に近接覚センサを搭載することで正確なマニピュレーションを実現しようとする試みは古くからある。1973年にNASAジェット推進研究所(JPL: Jet Propulsion Laboratory)のLewisら[2]は光反射式の測距センサを2指グリッパの先端に複数個搭載したロボットシステムを提案した。研究例は古くからある一方で、近接覚センサを搭載したロボットは今現在、普及しているとは言い難く、マニピュレーションの研究分野内でも極めて少数派である。この要因の一つに近接覚センサの計測値はピックアップする物体の材質や表面性状の影響を受けやすい点がある。特に光学式のセンサは小型サイズであることからグリッパ指先などの限られたスペースに搭載しやすい一方で、物体表面の光の反射特性の影響を受けやすい。この問題を克服するために、現在までに様々な計測原理の近接覚センサが考案されている。以降では主な光学式の近接覚センサを紹介し、著者が研究開発している近接覚センサの特徴を述べる。
3. Time of Flight式
単一光子を検出可能な高感度な受光素子(アバランシェフォトダイオード)を用いた小型の測距センサが2014年から製品化され、広く販売されている。数ミリサイズの筐体の中に発光・受光素子とコントローラが内蔵され、外部のマイクロコントローラと接続してシリアル通信(I2C、SPI通信)経由で計測値を受信可能なタイプが多い。基板上に実装するのみで手軽に測距機能を実現できる。2015年ごろから現在まで、ロボットハンドの指先にTime of Flight(ToF)式のセンサを搭載し、物体操作時の成功率を上げる試みが行われている[3]。
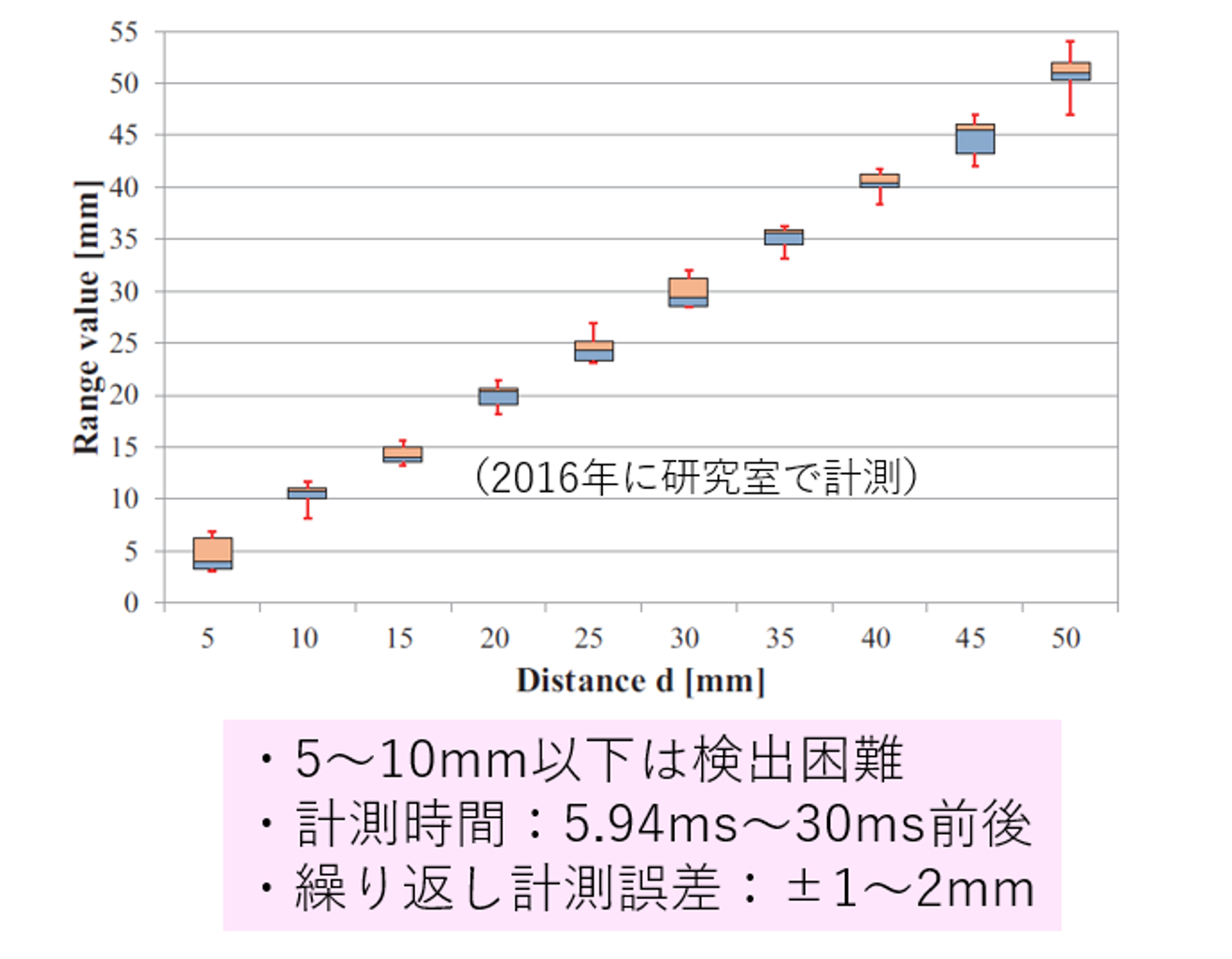
著者の研究グループも小型素子の発売当初から目を付け、ロボット指先用のセンサとして使用できないか検証してきた。しかし、計測精度と計測時間の両方に課題があり、学会発表は行ったものの社会実装までには至っていない。図2に代表的なToF式センサの測距特性を示す。ToF式は10cm以上の距離を均一な距離誤差で計測できる点が長所であり、移動ロボットやロボットアーム全周に取り付けて障害物回避や停止動作を行う際は有用であると考えられる。しかし、各距離において、ピークtoピークで2~4ミリメートル以上の誤差が発生するため、ハンド指先に搭載した場合、正確な位置決めが困難となる。一般的にロボット手先やハンド指開閉の位置決め精度はサブミリオーダであるため、ToF式のセンサでは計測精度が不足する。また、計測時間に関しても7~35ミリ秒と低速で、かつ、計測時間にバラつきが発生するため、ミリ秒オーダの高速周期でロボットを正確に制御する場合は計測時間も問題となる。
4. 三角測量方式
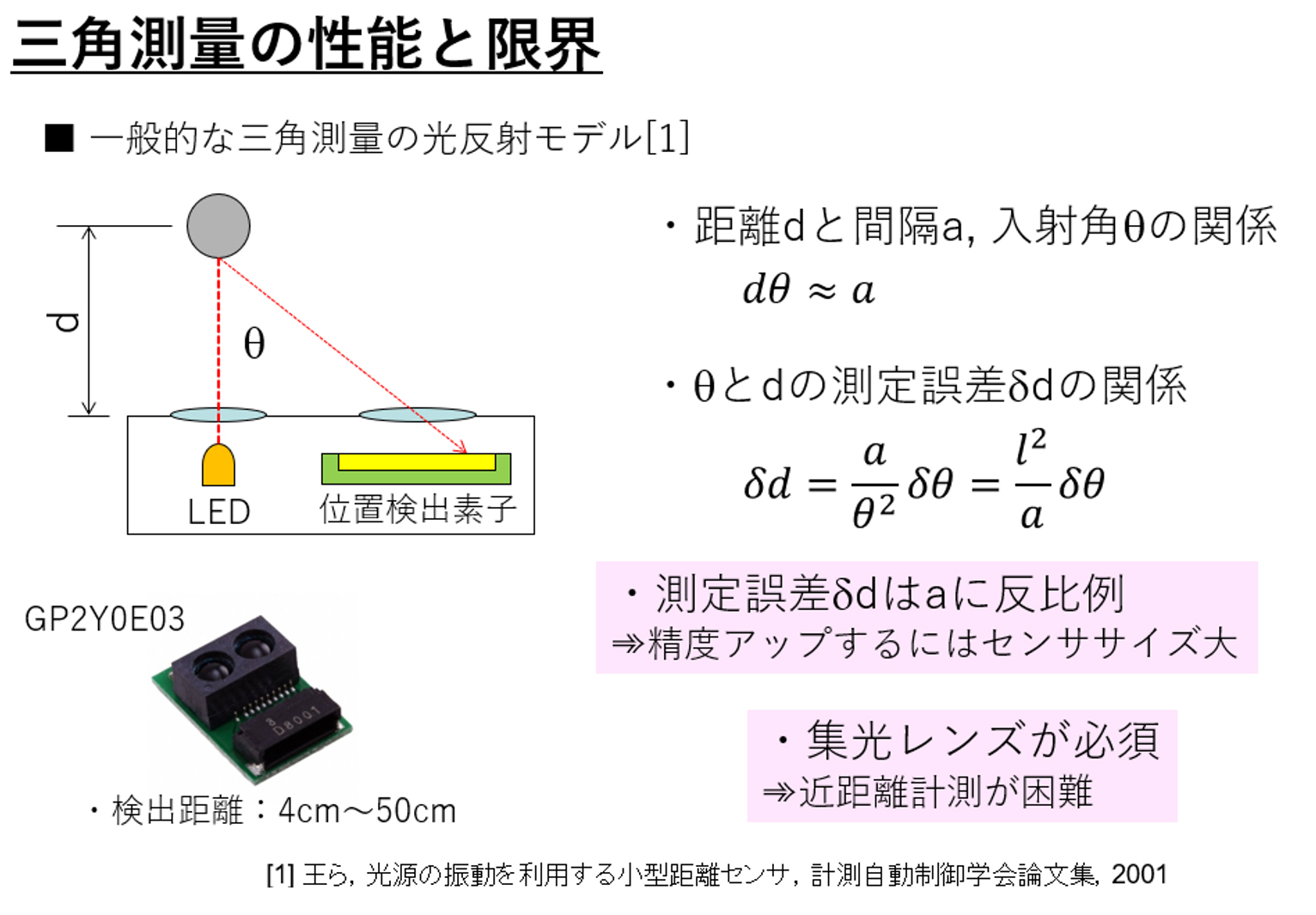
面状あるいは線状の受光部とレンズ系、単一の発光部で構成される原理であり、主に高精度なレーザ変位計の基本となる方式である。物体面からの反射光をレンズで集光し、受光位置から物体との距離を算出する。特に近距離において計測精度と分解能を高めやすいため精密な測定に向いた方式である。しかし、レンズを使用する関係上、焦点距離が生じ、概ね10ミリメートル以下の近距離計測が難しい問題がある(図3)。また、物体面が傾いている場合は測距精度が悪化しやすい欠点もあり、ロボット指先に搭載する上では課題が多い。
次回に続く-
参考文献
- W. Yuan, R. Li, M. A. Srinivasan and E. H. Adelson, “Measurement of shear and slip with a GelSight tactile sensor,” 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, pp. 304-311, 2015.
- R. A. Lewis and A. K. Bejczy: “Planning considerations for a roving robot with arm”, IJCAI Proceedings of the 3rd International Joint Confetence on Artificial Intelligence, pp.308-316, 1973.
- P. Lancaster and P. Gyawali, C. Mavrogiannis, S. S. Srinivasa and J. R. Smith, “Optical Proximity Sensing for Pose Estimation During In-Hand Manipulation,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 11818-11825, 2022.
【著者紹介】
小山 佳祐(こやま けいすけ)
大阪大学 基礎工学研究科システム創成専攻 助教
■著者略歴
2017年 電気通信大学大学院情報理工学研究科知能機械工学専攻博士課程修了(短期終了)。 2015-2017年 日本学術振興会特別研究員 (DC1)。 2017-2019年 東京大学大学院情報理工学系研究科特任助教。 2019年 大阪大学大学院基礎工学研究科助教、現在に至る。 2022年から株式会社Thinker取締役を兼務。 近接覚センサや多指ハンドに関する研究に従事。 計測自動制御学会、日本機械学会、日本ロボット学会会員。博士 (工学)。