
機械システム工学科
教授
武村 史朗
1. 研究室の概要
沖縄高専は「人々に信頼され,開拓精神あふれる技術者の育成により,社会の発展に寄与する」を理念として2004年に一期生を受け入れ,国立高専では最も若い高専である.筆者はレスキューロボットの研究開発に携わった経験の後,2007年に沖縄高専 機械システム工学科に赴任しました.海に囲まれた沖縄でする研究は海に関すること,海洋保全に貢献できるようなこと,沖縄に貢献できるようなこと,を念頭におき,水中ロボットに関する研究開発をはじめとするロボティクスに関する研究を行っている.
2. 研究内容・テーマ・実績
沖縄は海で囲まれています.筆者が赴任した当初はサンゴの白化現象の原因の一つにオニヒトデによる食害が挙げられる.そこで,沖縄近海における海洋保全・情報収集のための水中ロボットの研究開発を行っている.ここでは,筆者らが行っている水中ロボットに関する研究開発を紹介する.
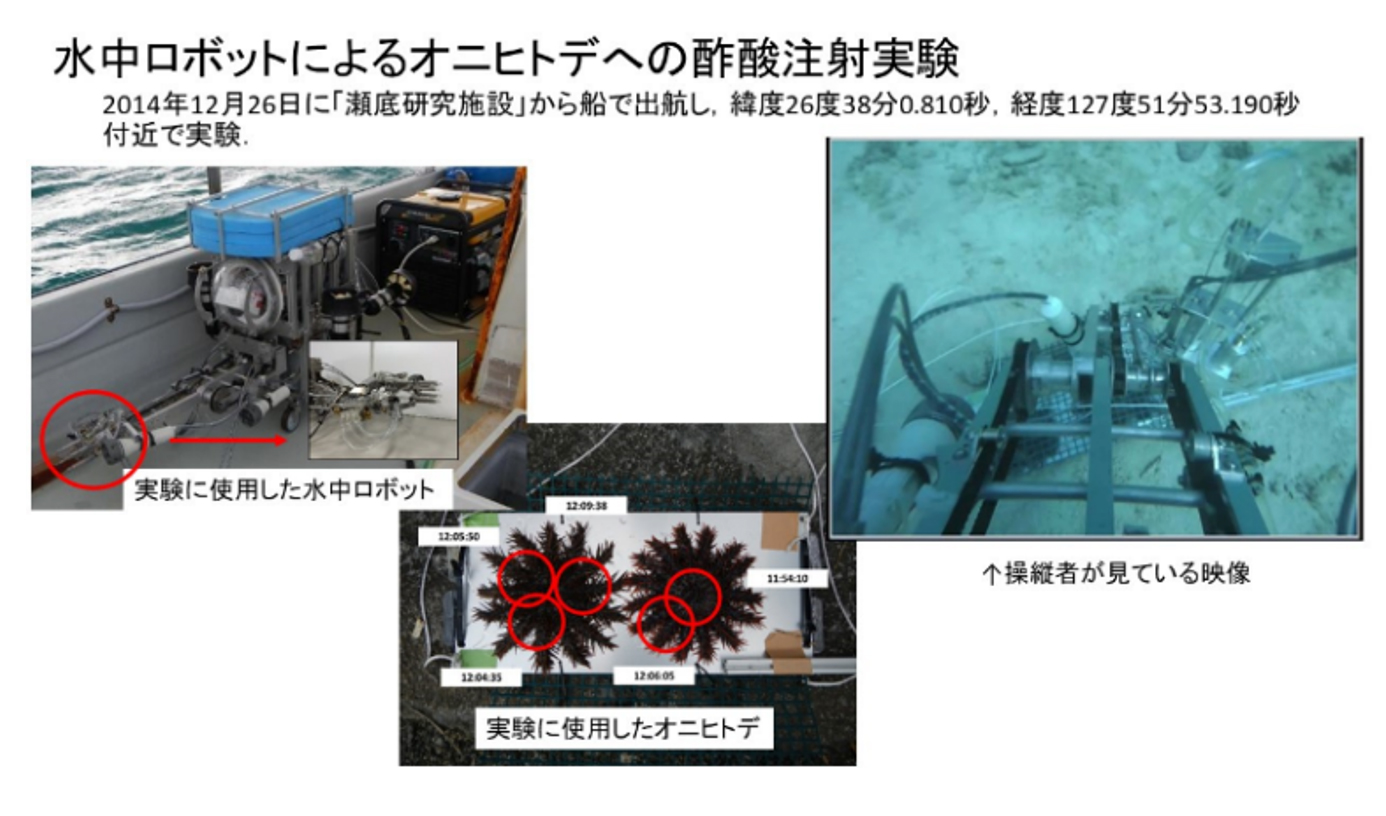
2.1 水中ロボットによるオニヒトデへの酢酸注射実験
サンゴの食害に対して,オニヒトデへの酢酸注射による駆除の仕方がある.ダイバーでの駆除は肉体的負担・安全性(オニヒトデは毒を持っているためアナフィラキシーショックを引き起こす場合があります)をダイバーが担う.肉体的負担・安全性を水中ロボットに担うことを目的として,酢酸注射を遠隔操縦の水中ロボットで行うことを試みた.操縦者は海上のボートで水中ロボットから送られる映像をラップトップパソコンで見ながら水中ロボットを操縦した.カメラ映像での操縦は,操縦者にかなりの負担となる.この実験では,水中ロボットでオニヒトデへ酢酸注射できることを確認した(図2-1参照).しかしながら,オニヒトデを探す・追いかける・酢酸注射を打つ,をすべて遠隔操縦で人が行うのは大変である.これらの作業をAI技術等により,自律的に作業できる自動化が求められる.この実験では,ダイバーによるオニヒトデ駆除ではなく,遠隔操作による水中ロボットの駆除の可能性を示すことができた.
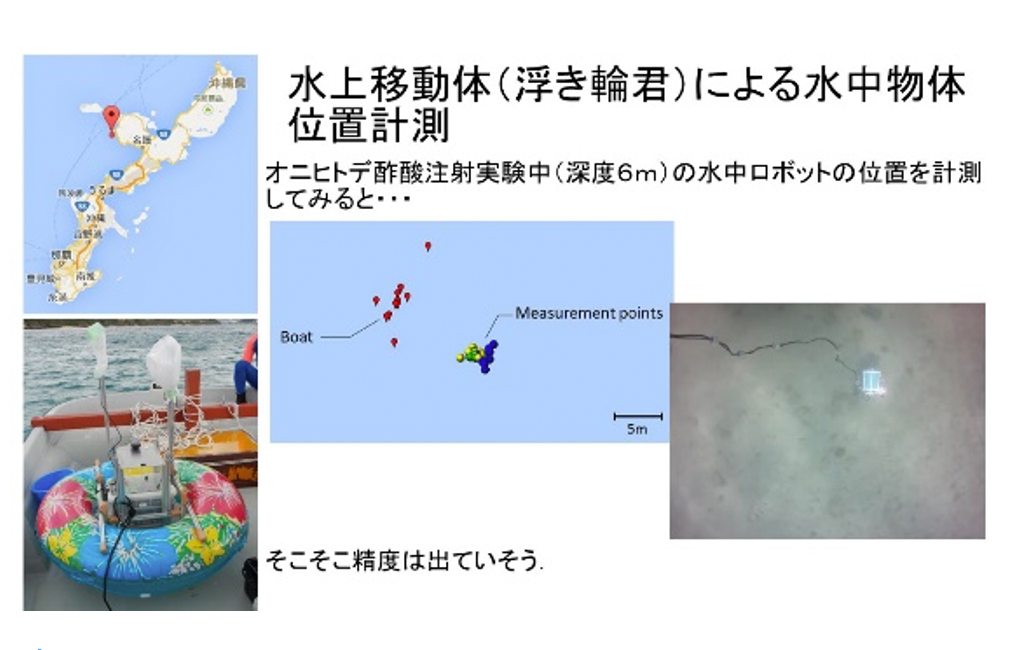
2.2 水上移動体の水中物体位置計測
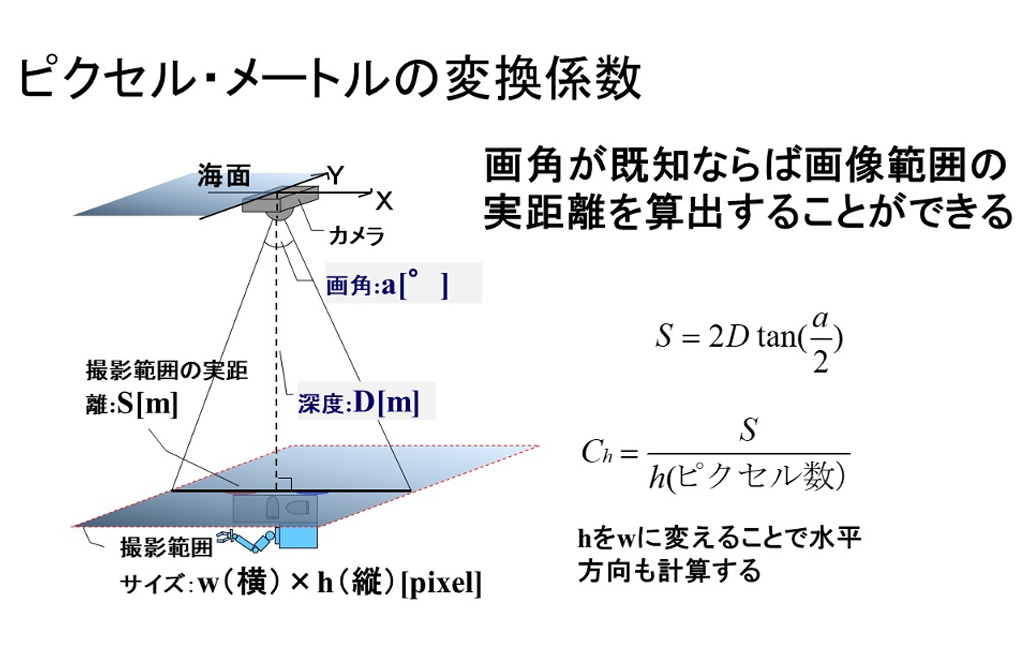
水中調査の際には,水中の位置は重要な情報になるが,水中では電波が届かないので,地上のようにGPSが使えず,位置情報はわからない.しかし,沖縄近海は透明度が高く,深度5mほどの海底は海面からくっきり見ることができる(図2-2-1の右側の写真)ことから,深度情報がわかれば,水中の位置が計測できる(図2-2-2参照).筆者らは,水中ロボットにLEDライトを上向きにつけ,水中ロボットから深度情報を取得し,水上移動体にGPS,下向きカメラ,姿勢センサを搭載することで,水中ロボットの水中での位置計測をできるようにした.図2-2-1はオニヒトデに酢酸注射する実験の際の位置計測を行ったものである.
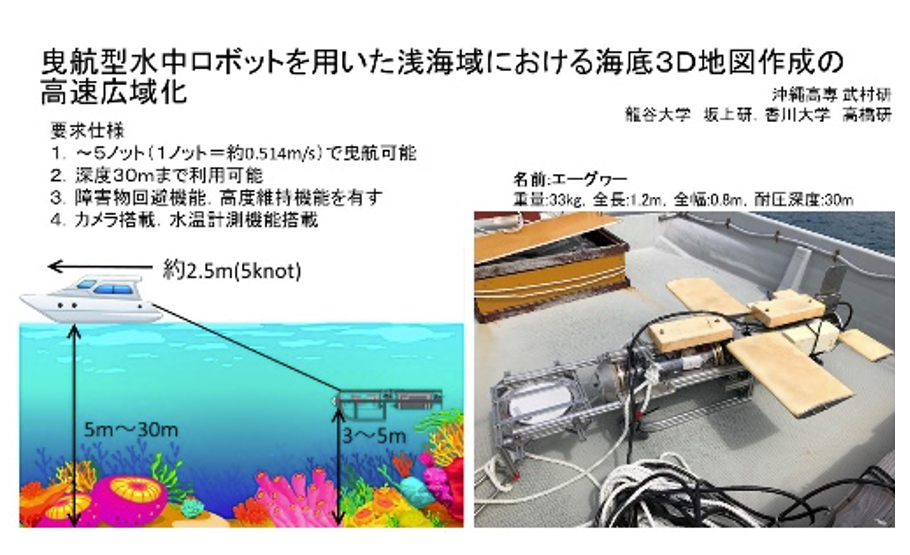
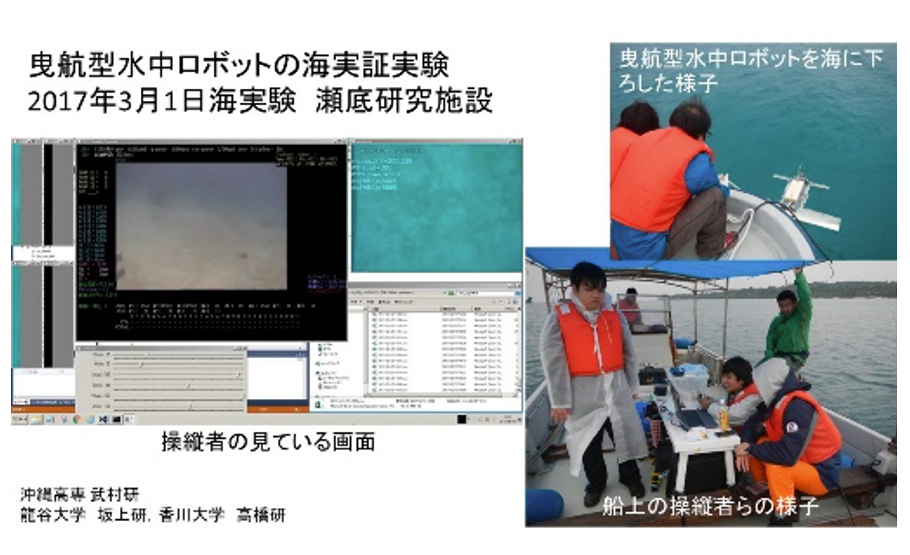
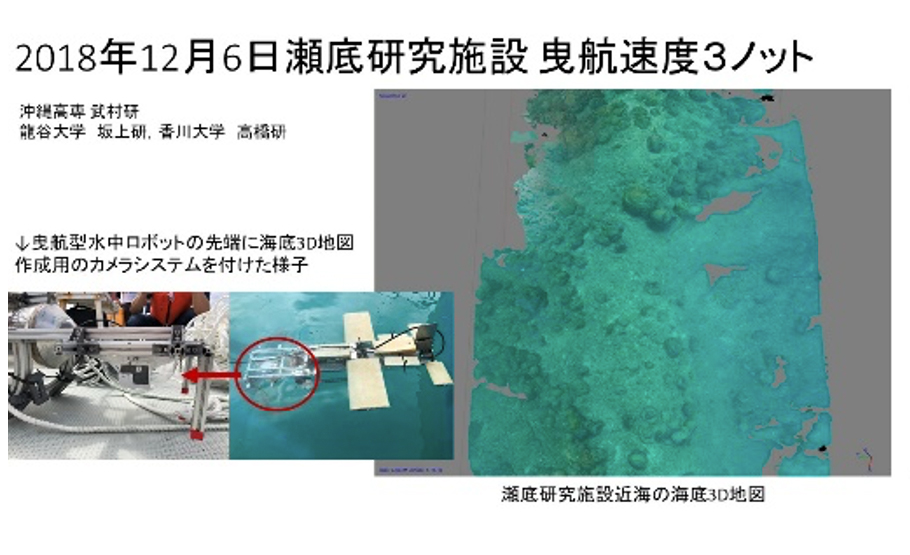
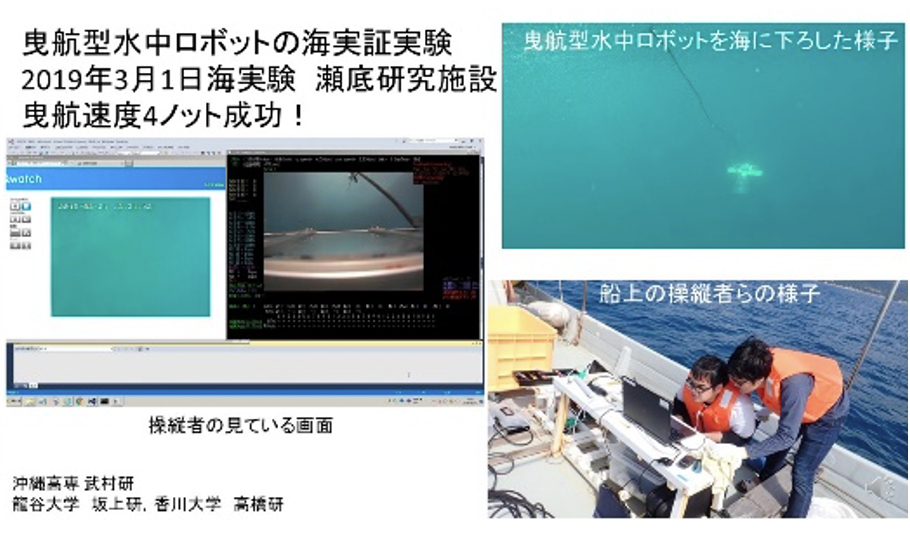
2.3 曳航型水中ロボットを用いた海底3D地図の作成(共同研究 龍谷大 坂上研,香川大 高橋研)
従来,AUV(自律型無人水中ロボット)を用いた海底3D地図作成は行なわれている.従来の方法だと3ノットまでが多いが,我々は,曳航型水中ロボットを用いて,浅海域における広域・高速に海底3D地図作成のための曳航型水中ロボットの開発・カメラシステムの開発を行なっている(図2-3-1,2,3参照).2019年3月1日曳航速度4ノットに成功した(図2-3-4参照).この技術が実用化できると定期的(1年に一回,またはさらなる高頻度)に同じ海域を撮影することで海底の経年変化の蓄積ができ,それを元にした海洋保全計画の作成,海洋考古学における海底ミュージアムなどの用途への応用が期待できる.同じようなことを従来の手法でするとダイバーが実際に潜水して行うことになるので,高コストかつ事故のリスクがある.ロボティクス技術を活用することで,人の安全も確保でき,海洋情報の活用方法が広がる.
3. 今後の方向性・展望
今回は,本研究室で主に研究開発をしている水中ロボットに関することを述べた.研究室の学生は毎年変動があるが,本科5年生,専攻科1・2年生で計5~10名程度で研究開発を行っている.本科生・専攻科生は学内外での研究成果を発表して,自身の発信力を身に着けている.また,本校の専門4学科の学生が集うロボット製作委員会では,毎年,高専ロボコン出場を目的としてロボット製作を行い,大会後は県内でロボット作りの楽しさを伝える活動を続けている.これらの研究活動・課外活動により,プロジェクトの経験・プレゼンを含むコミュニケーションの経験を得て,ロボット製作・制御の楽しさや奥深さを感じてもらい,地域貢献につながる学生教育を進めて行きたい.
【著者紹介】
武村 史朗(たけむら ふみあき)
沖縄工業高等専門学校 機械システム工学科 教授,ロボット製作委員会顧問
Fumiaki TAKEMURA, Dr. Eng., Professor
Department of Mechanical System Engineering, National Institute of Technology, Okinawa College
■略歴
- 2007年4月沖縄工業高等専門学校 機械システム工学科 准教授
- 2018年4月
(現在に至る)沖縄工業高等専門学校 機械システム工学科 教授
水中ロボット,ロボティクスに関する研究に従事