
田中 秀治
1.原子力潜水艦に使われた超高性能ジャイロ
ジュール・ヴェルヌの「海底二万マイル」に登場する潜水艦「ノーチラス号」は、陸地とは一切の交流を絶って海洋探検を行う。これが現実になったのは原子力潜水艦が登場してからであろう。潜水艦発射型弾道ミサイル「ポラリス」を搭載する「ポラリス潜水艦」は、1950年代に開発が始まり、1960年に配備された。このポラリス潜水艦は原子力潜水艦であり、仕様上は数か月の連続潜航が可能であると言われている。それには慣性航行のための超高性能のジャイロが必要とされ、イリノイ大学アーバナ・シャンペーン校のHoward Knoebel教授らのアイデアに基づいて1950年代に開発された。
ポラリス潜水艦に搭載されたジャイロは“Electric Vacuum Gyro”または“Electrically-Suspended Gyro”(ESG)と呼ばれる(参考ウェブサイト1) ,2) )。これは、金属球を静電力によって空中に浮上させ、電磁誘導によって高速回転させるものである。1979年に出版されたRockwell Internationalによって書かれた論文(Dale L. McLeod, Miniaturization of The Solid Rotor Electrostatic Gyro, IEEE Proc. National Aerospace and Electronics Conference (NA ECON), Part III, 1979, pp. 1199-1205)から、その「狂気の技術」の一端を紹介しよう。
その金属球は直径1 cmで、軽くて硬いベリリウムでできており、2500 rpsで回転する。ローターの角運動量が大きい方が有利なので、この金属球は高速回転するが、回転中に真球であることが望ましい。しかし、2500 rpsで回転すると、遠心力で金属球は赤道直径が0.13 μm、膨らんでしまう。また、金属球を安定回転させるためには、真球にもかかわらず、軸周りの慣性モーメントが最大でなくてはならない。さらに、金属球の回転を検出するために、金属球の重心を幾何中心から0.4 μm、ずらすことにした。さて、これらの要件をどうやって実現したのだろうか。
図1にその方法を示す。ベリリウム丸棒に比重の大きなタンタル線を3本埋め込み、一軸押出成形する。これによってベリリウム棒は軸方向に0.56 ppm/℃だけ大きな熱膨張率を示す。金属球を使用時より7.2℃低い温度で真球に加工する。このときタンタル線の位置をX線透過観察によって確認し、金属球の重心が所望の位置に来るようにする。真球に加工された金属球を使用温度にすると、金属球は熱膨張によって回転軸方向(押出方向)により多く伸びて、微妙に楕円体になる。これを2500 rpsで回転させれば、遠心力によって赤道直径が膨らみ、真球になるというわけだ。
2.ジャイロの性能
このように、当時、ありったけの技術を注ぎ込んで作ったESGは、0.0001 º/hのバイアス安定性を誇っていた。図2にジャイロの種類と性能を整理した。ここにはいくつかの種類のジャイロがバイアス安定性を横軸に取って示されているが、右側がハイエンドで、ESGは最も右側にあり、一方、左側はローエンドで、MEMSジャイロはここに位置する。ジャイロは性能にして6桁もの幅があるセンサであるが、それに応じてお値段にも1億円以上から100円以下まで幅がある。
ところで、上にジャイロの性能と一口に言い、また、その指標の1つとしてバイアス安定性を挙げたものの、これには少し説明を要するだろう。ジャイロは回転を検出センサなので、どのくらいゆっくりとした回転を検出できるかが最も重要な性能になる。今、あるジャイロがどのくらいゆっくりとした回転を検出できるかテストするとしよう。ジャイロを任意の角速度で回せる装置(レートテーブル)に載せて、検出軸まわりに回転させる。ジャイロをある角速度で回して、その角速度を次第に小さくしていくと、ジャイロからの出力信号はどんどん小さくなり、やがてノイズに埋もれて判別できなくなるはずである。ここが検出限界である。
しかし、出力信号の時間平均を取れば、ノイズは小さくなる。これ幸いと、いくらでも長い時間をかけて出力信号を測定し、それを時間平均すれば、いくらでも小さな出力信号、すなわち角速度を判別できるようになるかと言えば、そうはならない。その限界がバイアス安定性である。その様子を図3に示す。右下の図の横軸は平均時間のようなもの、縦軸はノイズのようなもの(アラン分散)である。この図は、「平均時間」τを長くしていけば、ノイズは の割合で減っていくものの、あるところで下げ止まり、それ以上にτを長くすると、かえって誤差が増えること表している。その底の部分がバイアス安定性に相当する(正確には、バイアス安定性の1/0.664倍)。センサ等を取り扱った経験があれば、図3の左側のスロープはホワイトノイズ、右側のスロープはブラウンノイズ、真ん中の平らな部分はフリッカノイズやピンクノイズなどと呼ばれることをご存じだろう。
の割合で減っていくものの、あるところで下げ止まり、それ以上にτを長くすると、かえって誤差が増えること表している。その底の部分がバイアス安定性に相当する(正確には、バイアス安定性の1/0.664倍)。センサ等を取り扱った経験があれば、図3の左側のスロープはホワイトノイズ、右側のスロープはブラウンノイズ、真ん中の平らな部分はフリッカノイズやピンクノイズなどと呼ばれることをご存じだろう。
もちろんバイアス安定性の他にもジャイロにとって重要な性能指標はある。バンド幅はどのくらい速い角速度の変化を測定できるかの指標であり、応答性とも言える。スケールファクターの安定性は感度、たとえば、角速度 1 º/sあたりの出力電圧の安定性である。ゼロ点の安定性も重要である。他には並進加速度に対する不感性もある。ジャイロは回転を検出するセンサなので、並進運動には反応すべきではない。しかし、実際にはジャイロにショックを与えると、出力信号が乱れることがある。そして、おおよそ全ての用途で深刻なのが、温度に対するスケールファクターとゼロ点の不安定性である。図3の右側のスロープはこの温度特性によるところが大きい。ジャイロの温度特性が悪いと、このスロープが上側にシフトし、その結果、検出できる最小の角速度が大きくなる。
3.MEMSジャイロ
図2に様々な種類のジャイロを示したが、世の中で最も使われているのはMEMSジャイロである。その小ささ、低廉さ、使い易さなどから、スマートフォン、ゲーム機器、自動車、ドローンなど、身の回りの多くの製品にMEMSジャイロが入っている。図4にMEMSジャイロを示す。その外観(a)は典型的には樹脂モールディングされた黒い電子部品である。その樹脂モールドを除去し、さらにメカニズムを保護している蓋(ウェーハレベルパッケージ)を取ると、(b)に示すようなものが現れる。このMEMSダイ(TDK-InvenSense MPU-9250)では、右側に3軸加速度センサ、左側に3軸ジャイロが形成されおり、ジャイロの実質的な大きさは1 mm2 程度である。なお、このジャイロがどのように動作するかについては 別の記事3) を参考にして欲しい。
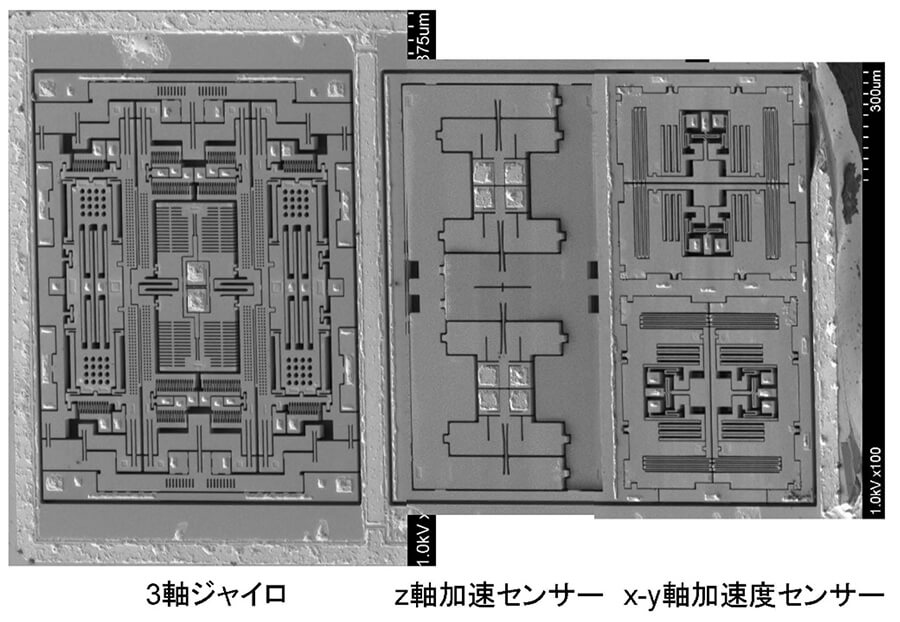
図4 MEMSジャイロ
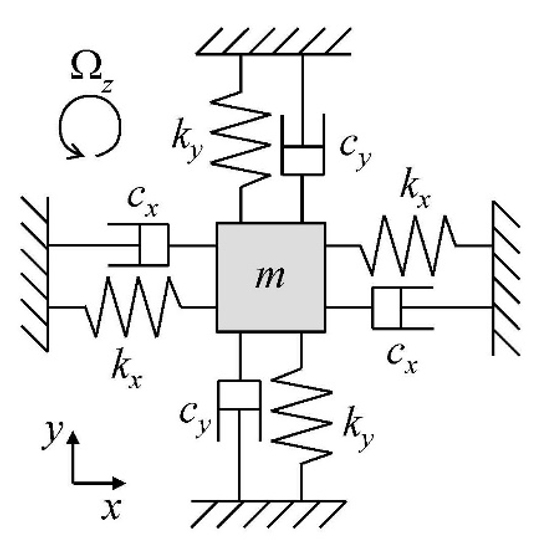
さて、MEMSジャイロは振動ジャイロの部類に属するが、図5を用いてその原理を説明する。ここで、おもり(m)が直交するx軸とy軸にばね(kx、ky)で支持され、各方向に振動する系を考える。今、この系が静止した状態で、おもりをx方向のみに一定振幅で振動させる。y方向には力は働かないので、おもりはy方向には静止したままである。ここで、この系を角速度Ωzで面内に回転させると、この系から見ておもりにコリオリ力が働く。コリオリ力は元の振動に直交した向き、すなわちy方向で、その大きさは元の振動の速度vxとΩzに比例し、2mvxΩzである。これによってy方向に振動が生じるが、定常状態でその振幅はΩzに比例するので、これによってΩzを測定できる。
ここまでの説明で納得できた人は多いと思うが、何だかおかしいと感じている人もいるだろう。y方向に静止しているおもりを加振したら、おもりに生じる振動は、減衰自由振動と強制振動の足し合わせたものになるはずで、Ωzに振幅が比例するのは後者だけのはず…そのように思った方は機械力学を学んだ方だ。おもりの振動が後者だけになるには、前者が十分に減衰するのを待たなくてはならない。しかし、これでは刻々と変わる角速度を測ることはできないため、実用的とは言えない。
これを解決する1つの方法は、前記2つの振動を周波数で分離することである。x軸とy軸の共振周波数、それぞれfxとfyを少しだけ違えておく。x方向に共振周波数fxで振動させると、y方向に生じる減衰自由振動の周波数はfyであり(実際には少し違うが、MEMSジャイロでは減衰係数が小さいので、ほぼ正しい)、一方、強制振動の周波数はfxであるから、後者の周波数成分だけ取り出せばよい。これはx方向の駆動信号を用いて同期検波すれば、可能である。こうやって復調された信号には、DC、|fy−fx|、|fy+fx|などの周波数成分が含まれるが、今、欲しい周波数成分はDCなので、|fy−fx|以上の成分をローパスフィルターでカットする。この方法は単純であるものの、|fy−fx|以上の角速度変化は測定できない、つまりバンド幅が|fy−fx|以下に限られるという欠点を持つ。
次回に続く-
参考文献
【著者紹介】
田中 秀治(たなか しゅうじ)
東北大学 大学院工学研究科 教授
■略歴
- 1999年3月東京大学大学院工学系研究科産業機械工学専攻博士課程修了。博士(工学)。
- 1999年4月東北大学大学院工学研究科助手。
- 2001年4月同講師。
- 2003年4月~2013年7月同助教授。
- 2013年8月同教授。
- 2004年1月~2006年3月科学技術振興機構研究開発戦略センターフェロー(兼務)。
- 2006年4月~2018年3月同特任フェロー。
- 2017年度日本機械学会マイクロ・ナノ工学部門 部門長。
IEEE Fellow、日本機械学会フェロー。
日経クロステック等に多くのMEMS関連記事を執筆。
ビジネスディベロップメントコンファレンス“MEMS Engineer Forum”代表
JST ACT-X「強靭化ハードウェア」領域総括
IEEE MEMS 2022 General Co-Chair.
Transducers 2023 Executive Program Chair.
MEMSセンサ、弾性波デバイス、集積化技術、MEMSパッケージング技術、圧電デバイス・材料などの研究に従事。