
田中 秀治
4.MEMSジャイロの高性能化
海洋産業で水中ドローンの用途が広がっているようだ。空中ドローンは姿勢を維持するのにMEMS慣性センサ(ジャイロ+加速度センサ)を、また、高度を測定するのにMEMS気圧計を利用している。MEMSジャイロはこの姿勢制御では良い働きをしている。これは、姿勢制御は比較的短時間の精度しか必要ないので、バイアス安定性の比較的悪いMEMSジャイロでもその任を果たせるからである。一方、GPSが利用できない水中ドローンでは、姿勢制御に加えて慣性航行のためにMEMSジャイロへの期待が高いと思う。しかし、慣性航行には現状のMEMSジャイロの性能は十分ではない。
いわゆる自動運転では、高層ビル群やトンネルでGPS信号が途絶える事態を想定して、実使用で0.1 º/hのバイアス安定性が必要だと言われている。図2に示したように、この性能はMEMSジャイロによって手が届く範囲にある。ただし、それを実現することの難しさは、どのような形態でこれを実現するか、どの温度範囲で性能を保証するかなどによる。特に難しいのは、この性能を図4 (a)に示した樹脂モールディングによる小型パッケージで実現することだろう。一方、MEMSダイをセラミックパッケージに入れ、さらにそれを堅牢な筐体に収めれば、MEMSダイは実装時や使用時の応力を受けにくくなり、安定性は格段に良くなる。また、MEMSダイを1つ1つトリミングして、加工誤差を補正する方法も高性能化には有効である。ただし、こうした方法はコストがかかるため、100万円以上の値付けになることもある。樹脂モールド品が100円以下で売られているのにである。
さて、MEMSジャイロの高性能化の主たる指針は、①マスを重く、②x軸の振幅を大きく、③y軸のQ値を高く、④x軸とy軸の共振周波数を近くすることである。MEMSジャイロでもマスは、ある程度、大きくできるが、それはダイ寸法の拡大を介してコストに跳ね返る上、そもそも限度がある。②は単純には駆動電圧を上げればできるが、消費電力が増えるので、特にモバイル用途では困る。Q値の向上は②と③の両方に有効であるが、y軸のQ値を上げると、fxとfyを近づけなくてはならなくなり、前述のようにバンド幅が小さくなる。ただし、これはy軸の変位を0にフィードバック制御する「フォースリバランス」によって回避できるため、Q値の向上は高性能化に有効な方法である。④の究極の形として、両軸の共振周波数を完全に一致させる(fx=fy)ことを「モードマッチング」と呼ぶ。これも高性能化に有効な方法として開発されているが、詳しくは 別の解説4) を参照して欲しい。
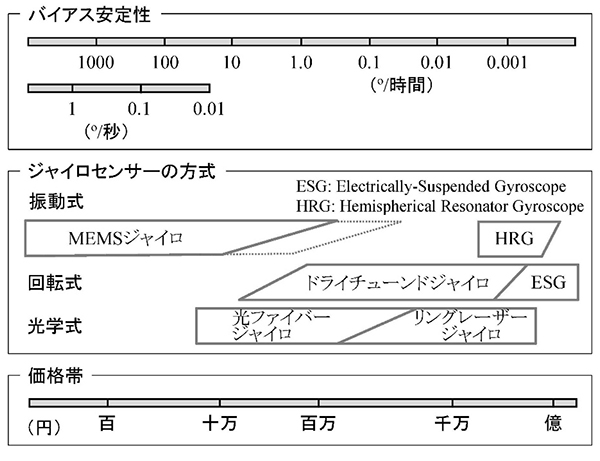
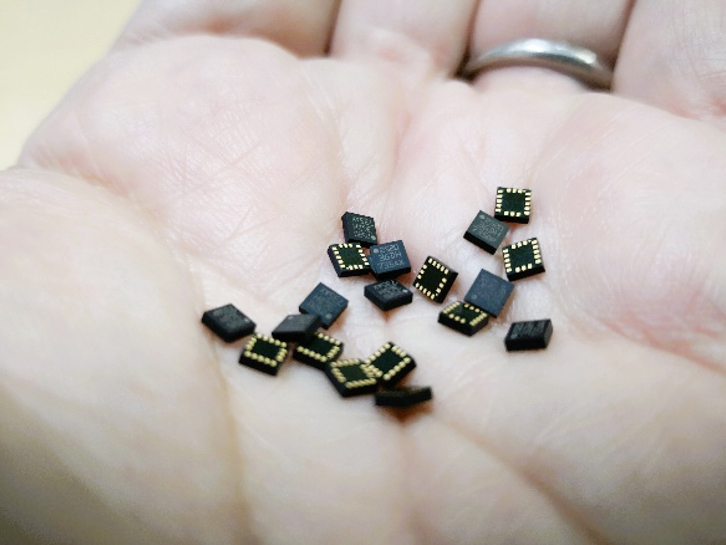
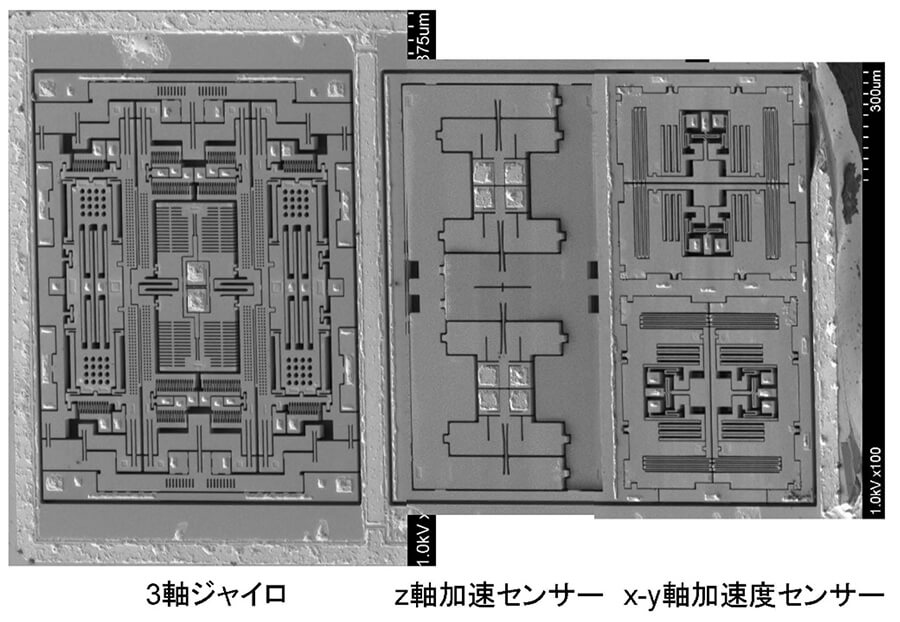
図4 MEMSジャイロ
5.高性能MEMSジャイロへの挑戦
上述の②から④の指針に沿ってMEMSジャイロを高性能化するための最大の障害は、加工誤差である。もし私達に設計通りに構造体を製造できる「神の手」があれば、高性能MEMSジャイロを実現することは比較的たやすいと思う。本稿の最初に紹介したESGを思い出して欲しい。理想に近いローターを製造するために「狂気の加工技術」が用いられ、その結果、超高性能が実現されたわけである。ベリリウムは人体に有害なので、その加工中の安全対策も大変だったはずである。また、他にも凄い加工技術が使われていることは想像に難くない。
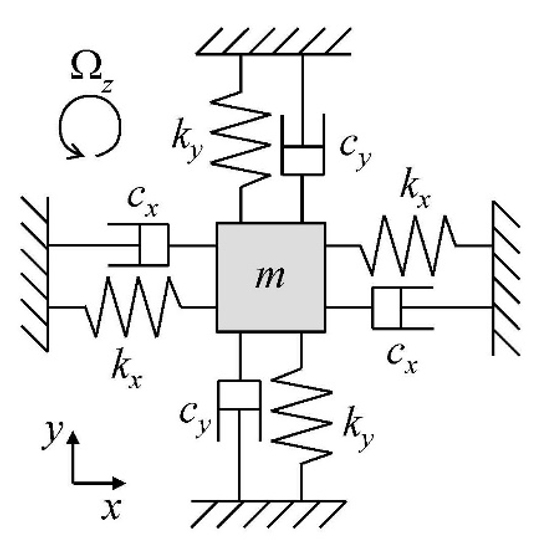
ところで、図5を用いてMEMSジャイロの原理を説明したが、そこでx軸とy軸は直交していると仮定した。ここで直交とは、系が静止している時、2つの軸がお互いに影響を及ぼさない、すなわち独立しているということである。しかし、実際にはそうならず、x軸が振動すると、MEMSジャイロが静止していてもy軸が僅かに振動してしまう、あるいはそのように検出されてしまう。その原因として様々な不完全性が考えられる。たとえば、x軸の櫛歯アクチュエーター(図4 (b)参照)のギャップが僅かに不均一でy方向にも力が働く、僅かな非対称のためx軸変位の歪みによってy軸が動く、x軸の駆動信号がy軸に漏れるといった原因が考えられる。これらの原因によるy軸の不要振動のうち、コリオリ力による振動と同相の成分は原理的に排除しようがなく、そのまま角速度の誤差となってしまう。
上に例示した原因のうち1つ目と2つ目の例示は加工誤差によるものである。CD-SEM(測長電子顕微鏡)で見て完璧にできていても、計測できない水準の僅かな不完全性によってx軸とy軸の不要なカップリングは生じてしまう。これはfxとfyを近づければ、より深刻になる。さらに、仮にMEMS構造体が完璧にできていたとしても、それをウェーハレベルパッケージング(参考記事5) )する際、MEMSダイをダイボンディングする際、あるいはパッケージ品をプリント基板に実装する際に歪が生じることがあるし、もちろん温度変化による熱膨張や樹脂モールドの吸湿で歪が生じることもある。
したがって、第1に加工誤差や歪が生じない構造設計、第2に高度な加工技術とパッケージング技術、第3に不完全性を補正する技術が重要になる。これらは、たとえば、原理的に理想的な構造でも作りにくければ、加工誤差が生じやすい、加工誤差が大きければ、制御や補正に無理が生じるといったようにお互いに関係しており、奥の深いMEMSジャイロの高性能化に向けて研究開発する余地はまだまだ大きい。
6.フーコー振子と全角モードジャイロ
フランスの物理学者Jean Bernard Léon Foucault(1819~1868年)は、1851年にパリのパンテオン宮殿に長さ67 m、質量27 kgの振子を設置して、地球の自転を実証する公開実験を行った。このフーコー振子(図6)はゆっくりとした地球の回転を測定できるジャイロであり、しかも、出力は角速度ではなく回転角そのものである。このようなジャイロを全角モードジャイロと呼ぶ。自律航行や位置同定にはある基準に対する角度が必要であるが、角速度を出力する普通のジャイロ(レートジャイロ)を用いてこれを得るためには、角速度を積分しなくてはならない。しかし、角速度出力にはドリフトやゼロオフセットが含まれているので、積分によってあっという間に誤差が蓄積し、得られた角度はあさっての方向を示してしまう。これに対して、地球の回転を測定できるフーコー振子は高性能ジャイロと言える。
実は、図5に示した直交2軸振動系を用いてフーコー振子をMEMSで再現できる。そのための条件は、x軸とy軸が完全に同じで、かつ完全に直交していることである。このような振動系に直線振動を起こすと、系の回転に比例してマスの振動方向が回転し、つまり全角モードジャイロが実現する。

全角モードジャイロは、原理的にバンド幅が無限大で、しかもスケールファクターがジャイロの構造だけによって決まり、温度に影響されないという特長を持つ。上述のフォースリバランスジャイロでは、スケールファクターはy軸の共振周波数によるが、シリコンを含むほとんどの材料は温まると柔らかくなるため共振周波数には温度依存性があり、したがってスケールファクターは温度で変わってしまう。既に述べたように、温度変化によるスケールファクターの変化は高性能ジャイロにとって深刻な問題であり、これがMEMS全角モードジャイロが期待される1つの所以である。しかし、既に述べたように、x軸とy軸が完全に同じにし、かつ完全に直交させることは難しい。その実現には多くの挑戦があるが、私達の研究については次の論文を参考にして欲しい( 論文16)、論文27) )。
7.おわりに
海中では、地上、海上、および空中より慣性航行に頼る部分が多くなるため、ジャイロの役割が大きいはずである。だからこそ、ポラリス潜水艦のためにESGが開発された。現代においては、海洋産業向けの高性能MEMSジャイロがこの分野の技術を先導し、VR、自動運転、ロボティクスなどに応用を広げていくストーリーがありうるだろう。様々な応用が広がるというのはとても重要なことである。というのも、半導体製造技術に基づくMEMSは大量に生産すれば、安くなり、安くなれば、さらに思ってもみなかった応用が広がるというポジティブ・フィードバックが働く製品だからである。ジャイロの専門的な技術に興味があれば、国際会議 IEEE Inertial 20248)に参加してみるのもよいと思う。
参考文献
【著者紹介】
田中 秀治(たなか しゅうじ)
東北大学 大学院工学研究科 教授
■略歴
- 1999年3月東京大学大学院工学系研究科産業機械工学専攻博士課程修了。博士(工学)。
- 1999年4月東北大学大学院工学研究科助手。
- 2001年4月同講師。
- 2003年4月~2013年7月同助教授。
- 2013年8月同教授。
- 2004年1月~2006年3月科学技術振興機構研究開発戦略センターフェロー(兼務)。
- 2006年4月~2018年3月同特任フェロー。
- 2017年度日本機械学会マイクロ・ナノ工学部門 部門長。
IEEE Fellow、日本機械学会フェロー。
日経クロステック等に多くのMEMS関連記事を執筆。
ビジネスディベロップメントコンファレンス“MEMS Engineer Forum”代表
JST ACT-X「強靭化ハードウェア」領域総括
IEEE MEMS 2022 General Co-Chair.
Transducers 2023 Executive Program Chair.
MEMSセンサ、弾性波デバイス、集積化技術、MEMSパッケージング技術、圧電デバイス・材料などの研究に従事。