
染川 智弘
1.はじめに
日本の領海・排他的経済水域は国土面積の12倍程度も大きく、海底鉱物・エネルギー資源の採掘、CO2の大規模削減を目指すCCS(Carbon dioxide Capture and Storage)、海底パイプラインなど、有効な海底利用が期待されている。海底開発では資源探査手法の開発だけでなく、海底インフラのメンテナンスや事故の早期発見、開発に伴う海洋生態系・環境への影響評価が重要とされている。現状の採取・採水測定による海中環境の評価は、頻度や評価可能なエリアに限度があるため、広範囲な領域を短時間でモニタリングが可能な水中ライダーを提案している。
ライダーはLIght Detection And Ranging (LIDAR)の略語であり、レーダーの光源をラジオ波からレーザーに置き換えたリモートセンシング技術である(1)。レーダーでは雨粒などの測距だけでなく、偏波・ドップラー効果といった電磁波の特性を利用することによって、降水粒子の識別(雨、雪など)や風の観測など、付加情報を生み出している。一方、レーザーを利用すると、その高い電場強度によってレーダーでは観測されない蛍光、ラマン散乱なども観測することが可能となる。先の降雨の例で言えば、雲を形成する前の水蒸気の状態から観測が可能となるため、この情報を利用した気象予測モデルの精度向上が検討されている(2)。
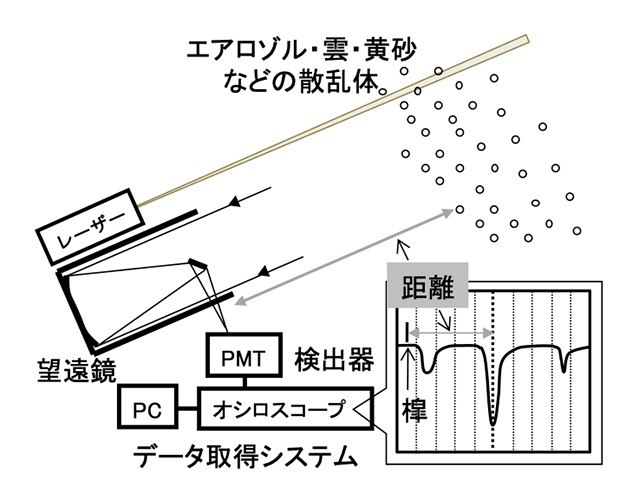
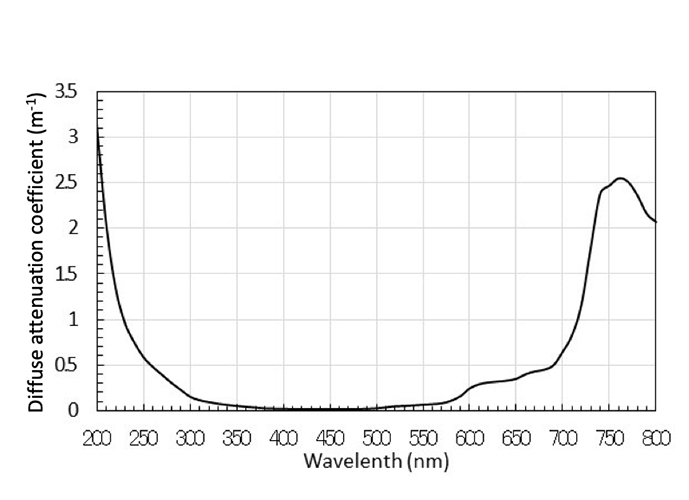
ライダーでは、パルスレーザーを照射し、測定対象との相互作用を望遠鏡などで受信するのが一般的な装置構成である(図1)。送信レーザーのトリガー信号(T)に対する散乱信号などの時間遅れを距離に換算することで、測定対象の距離情報の取得が可能になる。この光の飛行時間を測定する方式がTime Of Flight(TOF)方式である。大気中であれば数kmに及ぶ測定対象の高度分布情報を取得することが可能であり、様々な環境計測で測定が実施されてきたが(1)、水中への応用となると海底地形の把握程度で応用例が格段に減少する(3)。これは、光が水を通り抜けにくいことが原因の一つであろう。水は光の吸収体としてよく知られてはいるが、図2に深紫外から近赤外領域の水の減衰係数(透過特性)を示すように(4)、紫外から青、緑の波長領域の光は透過特性が良い。そこで、これらの透過特性の良い波長のレーザーを利用して、測距だけでなく水中の成分分析まで可能なライダーの利点を活かした、水中ラマンライダーの開発を実施している(5)-(13)。
2.ラマンライダーによる水中モニタリングの可能性
ライダーで水蒸気などのガスを測定しようと考えると、一般的に吸収とラマン散乱計測の2通りのアプローチがある。吸収は、ppmのオーダー程度の微量濃度評価が可能な手法であるが、図2に示したように水の透過領域で対象ガスの吸収ラインが都合良く存在しないため水中計測に利用することはほぼできない。一方で、ラマン散乱は現象自体が微弱であり、微量分析には不向きという欠点はあるが、使用するレーザー波長に制限がないため、水の透過が良いレーザーを利用すれば導入は容易である。水の透過領域である紫外~緑色の波長領域では、大気中のラマンライダーでも良く利用される波長532、355 nmで高パルスエネルギーであるNd:YAGレーザーが豊富にある。そこで、水に溶けているCO2ガスとして、市販の炭酸水の瓶を20 m先に設置して、ラマンライダーによって瓶の中のCO2ガスが見えるのかを確認した。
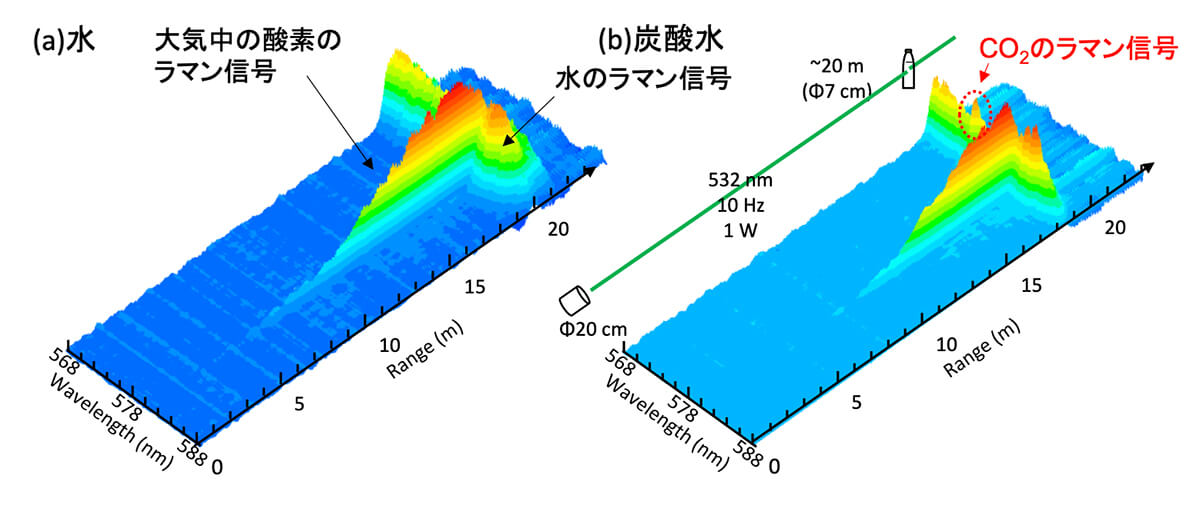
図3がラマンライダーによる炭酸水の識別試験の結果である(5)。(a)が炭酸水と同じ瓶にいれた蒸留水、(b)が炭酸水の観測結果である。~583 nmに見られるのが水のラマン信号であり、水・炭酸水の両方に観測されている。それに加えて炭酸水からは~574.3 nmのCO2のラマン信号が観測されている。この実験では、水中にあるCO2ガスではなく、大気中に設置した炭酸水の瓶を観測しているため、~579.9 nmに大気成分である酸素のラマン信号も測定されている。このようにラマンライダーを利用すれば、1台の水中ライダーシステムで複数ガスや油の同時モニタリングが可能になり、海底開発に伴う環境影響評価などに対して効率的な水中モニタリングが期待できる。図3に示した水に溶けているCO2ガスだけでなく、気泡状態での定量分析手法の検討や(6)、海水に含まれる成分の干渉がないことも確認し(7)、本手法の海中モニタリングへの適用可能性を検証するために海上ラマンライダー観測を実施した(8)-(10)。
次回に続く-
参考文献
- C. Weitkamp: ed., Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere, Springer (2005)
- 染川智弘, 佐藤悠, 高橋真弘, 高田望, 藤田雅之 : 日本リモートセンシング学会誌, 3, 360 (2013)
- J. L. Irish and T. E. White : Coastal Eng. 35, 47 (1998)
- R. C. Smith and K. S. Baker : Appl. Opt. 20, 177 (1981)
- T. Somekawa, A. Tani, and M. Fujita: Appl. Phys. Express, 4, 112401 (2011)
- T. Somekawa, T. Takeuchi, C. Yamanaka, and M. Fujita: Proc. of SPIE, 9240, 92400J (2014)
- T. Somekawa and M. Fujtia: EPJ Web of Conference, 119, 25017 (2016)
- T. Somekawa and M. Fujita, EPJ Web of Conferences, 176, 0102 (2017)
- T. Somekawa, S. Kurahashi, J. Kawanaka, and M. Fujita, Proc. SPIE, 10791, 1079104 (2018)
- 染川智弘:レーザー研究,48,599 (2020).
- T. Somekawa, J. Izawa, M. Fujita, J. Kawanaka, and H. Kuze, Opt. Commun. 480, 126508 (2021).
- T. Somekawa, J. Izawa, M. Fujita, J. Kawanaka, and H. Kuze, Appl. Opt., 60, 7772, 2021.
- T. Somekawa, S. Kurahashi, S. Matsuda, A. Yogo, and H. Kuze, Opt. Lett., 48, 5340 (2023).
【著者紹介】
染川 智弘(そめかわ としひろ)
(公財)レーザー技術総合研究所 レーザー計測研究チーム 主任研究員
大阪大学 レーザー科学研究所 招へい教授
■略歴
- 2008年3月大阪大学大学院理学研究科宇宙地球科学専攻 博士(理学)
- 2008年4月~公益財団法人レーザー技術総合研究所 入所 研究員、副主任研究員、上席研究員を経て現在、主任研究員
- 2023年4月~大阪大学レーザー科学研究所 招へい教授