Flynn, R., and Idown, J., Nitrogen Fixation by Legumes. Publications. College of Agricultural, Consumer, and Environmental Sciences, New Mexico State University. https://aces.nmsu.edu/pubs/_a/A129/ Accessed 3 September 2022.
Sentis, I.P.,Soil salinization and land desertifcation. In: Rubio, J.L., Calvo, A. (eds.) Soil degradation and desertification in Mediterranean environments, pp. 105–129. Geoforma Ediciones, Logroño (1996).
■略歴
1997年筑波大学大学院社会工学研究科博士課程修了後、国立環境研究所、群馬大学工学部、東京大学大学院農学生命科学研究科、東京大学生産技術研究所と異動し、現在、京都先端科学大学工学部および東京大学生産技術研究所に所属している。また、途中、イタリア・イスプラにあるJoint Research Centreへの研究留学や、数年間の内閣府総合科学技術会議へ出向(併任)の経験を持つ。研究では、一貫して環境、農業分野における衛星リモートセンシング手法の開発に従事してきたが、この頃、農業生産者に役立つドローンでのリモートセンシング手法の開発にも興味を持ち、是非、農学と工学の融合による食料生産技術分野の確立に貢献したいと思っている。食料生産技術研究会を運営中。
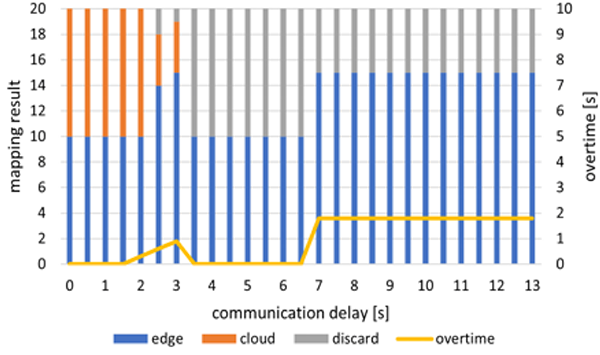
J. Yoshimoto, I. Taniguchi, H. Tomiyama, T. Onoye, “Priority-aware Static Task Mapping for Edge-Cloud Collaborative Platforms,” Proc. of International Conference on Electronics, Information, and Communication (ICEIC), pp. 518-521, Feb. 2022.
I. Taniguchi, J. Kaida, T. Hieda, Y. Hara-Azumi, H. Tomiyama, “Static Mapping with Dynamic Switching of Multiple Data-Parallel Applications on Embedded Many-core SoCs,” IEICE Trans. on Information and Systems, Vol.E97-D, No.11, pp.2827–2834, Nov. 2014.
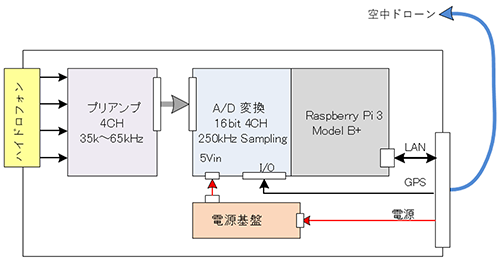
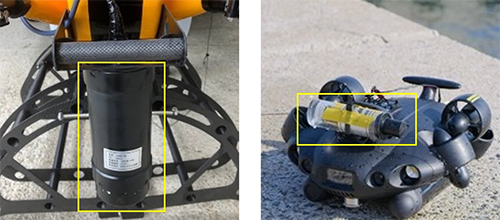
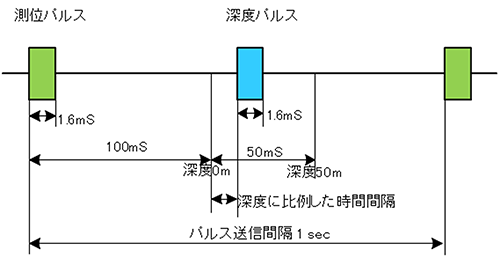
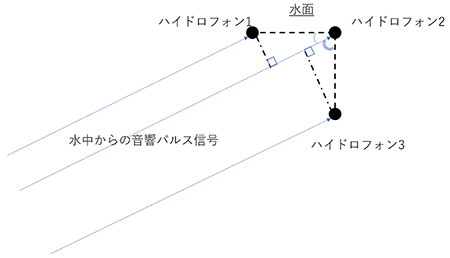
本稿では、筆者らが開発している水空合体ドローンの音響測位システムについて説明した。小型化のため SSBL 方式とし、また浅海域で使用するため、音響パルスを反射に強い設計としている。さらに低コスト・短期間で開発するため、Arduino や Rasberry Pi を活用している。
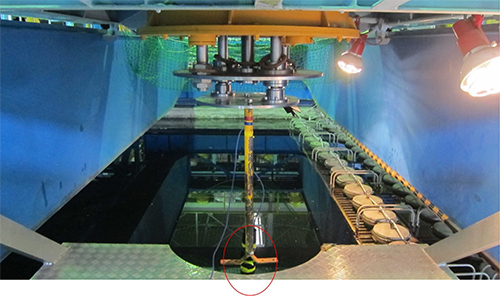
現状、水中ドローンは遠隔からの手動操作となっているが、今後、自動潜航を実現するためには、音響測位の更なる安定化・高精度化が重要となる。このため方式改良を続けるとともに、多数のドローンが同時に作業可能とするため、複数のターゲットの同時測位機能も実現する予定である。
参考文献
海洋音響学会:“海洋音響の基礎と応用”, 成山堂書店 (2004).
J. Kojima, H. Sugimatsu, T. Ura, R. Bahl, S. Behera and K. Nagahashi: “Development of a prototype underwater acoustic and motion recorder for the Ganges river dolphin”, Proc. IEEE Oceans, pp. 1–6 (2014).
J. Kojima, H. Sugimatsu, T. Ura, R. Bahl, S. Behera and V. S. Sagar: “An integrated observation system with multiple acoustic arrays for underwater behavioral study of the Ganges river dolphins”, Proc. IEEE Oceans, pp. 1–6 (2011).
J. Kojima, H. Sugimatsu, T. Ura, R. Bahl, S. Behera, H. Singh and V. S. Sagar: “Long-term real-time monitoring system for Ganges river dolphins using two sets of 6-hydrophone array systems”, Proc. IEEE Oceans, pp. 1–6 (2013).
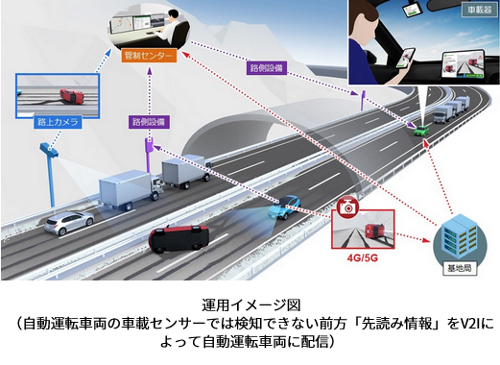
(注1)V2I は「Vehicle to Infrastructure」の略で、ICT通信機能を有するコネクテッド車両とインフラ設備の無線通信を指す。
(注2)Connected(コネクテッド)、Autonomous(自動運転)、Shared(シェアリング)、Electric(電動化)の頭文字をとった造語で、安全で利便性の高い次世代型モビリティ・サービスを構築するための自動車産業界における技術トレンドのこと。








![図 8 ピンガーの中のトランスデューサー及び圧力センサ搭載部 [9]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_08.png)
![図 8 ピンガーの中のトランスデューサー及び圧力センサ搭載部 [9]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_09.png)