
東北学院大学 教授
松尾 行雄
3.自動尾数計測システムMagicCounter
MagicCounterは養殖魚の分養時に,生簀と生簀の網を繋いでつくった魚道(通過枠)に超音波の送受波器を設置し,通過する魚の個体数を海中でカウントするシステムである.図4は,実際のマダイの分養時の様子をカメラ(GoPro)で撮影したものである.マダイが密となって,魚道を通過していることがわかる.分養における魚検知ということで,対象までの距離が短いことを踏まえ,送信信号を従来に比べて短くした短パルス信号を用いる.短パルスを用いることで,適用できる距離は短いが,広帯域信号と同じような深度分解能を有し,密な魚群においても単体検知することが可能となる.
超音波の指向特性はカメラに比べて狭く,今回使用している送受波器の場合,5度程度である.したがって,一つの送受波器では魚道の全エリアをカバーすることができないため,複数個の送受波器を扇状に配置させる必要がある.分養における取り回しと尾数カウントの精度を考慮して,5個の送受波器を使用している.図5(a)に送受波器のシステムを示している.空中において,音を送信するためのスピーカと,音を受信するためのマイクは基本別々のものを使用することが多いが,水中においては,同じ機器を送信にも受信にも利用することが多い.今回のシステムも送受波器と名前がついているように,送信と受信を同時に行う機器となる.魚道をカバーするように5個の送受波器を設置した場合,魚のサイズによっては,それぞれの送受波器の指向特性から,図5(b)に示すように計測エリアと非計測エリアが発生する.この計測エリアと非計測エリアは,魚のサイズに依存していることから,MagicCounterでは,魚のサイズに対応した指向特性を設定することで,それぞれの送受波器で通過する尾数から,非計測エリアの通過尾数を予測する.この非計測エリアの予測通過尾数を合わせることにより,全体の通過尾数をリアルタイムに表示している.
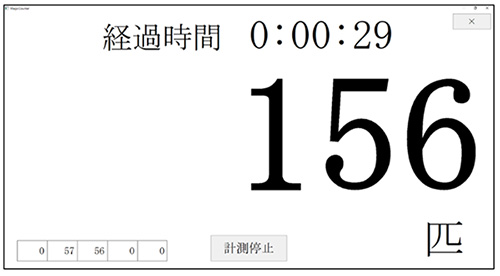
実証実験では,同じ生簀を複数回分養し,かつ,GoProでも水中での通過の様子を撮影した.その結果から,10%以内の誤差で通過尾数を評価できていることを示した(特許出願中:特願2022-189848).現在は,愛媛県にある養殖業者で運用を開始されており,ユーザーが機器をセットしたら,PCでアプリを起動しボタンを押すだけで開始でき,簡単に計測する事が可能となる(図6).加えて,計測データ,ならびに,解析されたデータはクラウドにアップロードすることで,精度の向上のために用いている.今後は,マダイだけでなく,ブリやカンパチやマグロなど他魚種に対応していく予定である.また,養殖業者ごとに生簀の形や大きさ,分養の方法は異なり,標準的なものがないと言える分野でもあるため,データの活用により,分養の仕方の標準化に取り組んでいく予定である.

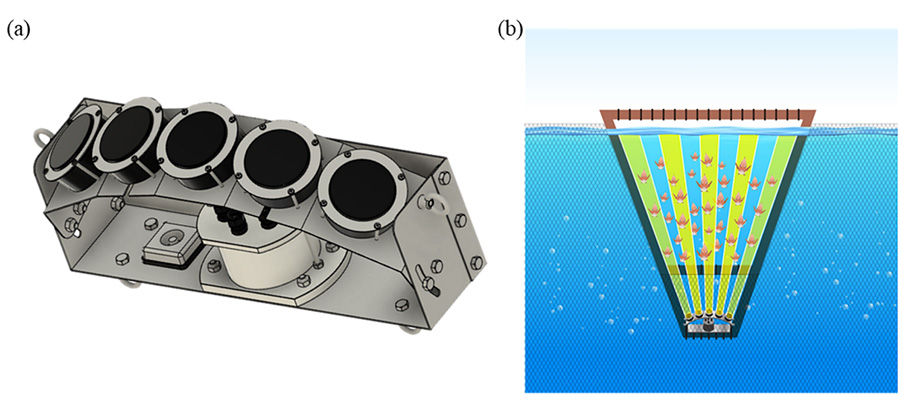
黄色のエリアが計測エリアとなり,非計測エリアが存在する.
4.おわりに
本稿では,海面養殖における分養時に通過する魚尾数を自動カウントするMagicCounterについて紹介した.海面養殖は長年行われているが,生簀内に本当に何尾いるかを把握できる仕組みがなく,経験と勘にたよる形しかなかった.MagicCounterを活用いただくことで,分養という作業により,生簀内の尾数をカウントできる画期的なシステムとなり,従来では不可能であった生簀の尾数を管理することができるようになる.生簀内の尾数を管理できることで,最適な給餌量につなげることができ,養殖事業の効率化につながり,今後の養殖において重要な役割を担う可能性があると考えている.
【著者紹介】
松尾 行雄(まつお いくお)
株式会社AquaFusion取締役 / 東北学院大学教授
■略歴
次世代水中可視化システムを開発するAquaFusionの共同創業者・取締役.山口県出身.2000 年東北大学大学院工学研究科電気・通信工学科博士課程退学.2001 年博士(工学).2000年から東北大学電気通信研究所助手,産学連携研究員等を経て,2005年東北学院大学教養学部准教授,2015年同教授となり,現在に至る.2017年株式会社AquaFusion設立.
睡眠・介護の質を可視化する圧力分布センサ -スリープテック、ヘルステック応用-(2)

技術開発本部
第1グループ
伊東 孝道
5.圧力分布センサの開発動向
半導体をはじめとする電子デバイスの小型化・高性能化・低価格化ならびに情報化社会の発達に伴い、圧力分布センサに対する技術要求も年々変化してきている。これまでの圧力分布センサは、計測器として圧力分布を可視化すること自体が目的であった。一方、今日では圧力分布を数値的に表示することのみならず、その先に得られる情報を提供するソリューション開発が求められている。具体的には、スリープテックやヘルステック分野における組み込み機器としてのニーズが高まっている。
5.1 姿勢判別センサへの応用
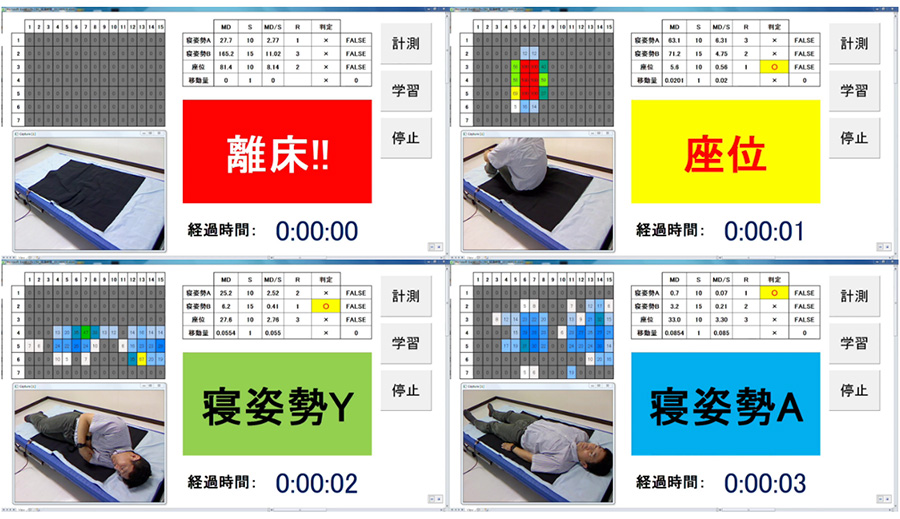
ベッド上の圧力分布を測定すると、どのような姿勢でどのくらいの時間寝ていたか、一晩で何回寝返りをしたかなど、睡眠の質に直結したデータを取得することができる。これまで睡眠状態の解析は、計測器を前提とするとオフラインで解析者が判断するものであった。図5はMT法(Mahalanobis-Taguchi System)を用いて寝姿勢を判別した結果である。このように、統計解析や機械学習技術を適用することで、リアルタイムな姿勢判別が実現できる。また、アルゴリズムを圧力分布センサに実装すれば、寝姿勢をアクチュエータなどにフィードバックするアプリケーションへの応用が可能になる。
5.2 見守りシステムへの応用
日本の総人口が減少局面を迎える中、高齢化率は年々上昇しており、介護業界における人手不足は大きな課題となっている5)。そこで介護現場の負担を軽減し、主業務である被介護者へのケアを補助するため、介護ロボットの開発と普及が促進されている6)。
介護施設のベッドに圧力分布センサを組み込み、見守りシステムとして応用した例を図6に示す。基本的な見守り機能として、姿勢判別技術を改良した詳細な状態判定(「離床」「端注意(入眠)」「端注意(起床)」「起き上がり」「体動」「体動過多」「安静」「無体動」)を行う。そのうえで危険な状態を複数段階設定し、PCやスマートフォンにケアのタイミングをアラーム通知する。またシステムとして、センサとの通信はワイヤレス、データはローカルやクラウドサーバで管理し、モニタリングは個室や多床室を一括で監視できる機能を有している。状態判定から被介護者の生活リズムを見える化することで、昼夜逆転の把握や行動予測が可能になり、ケアプランなど介護職員間の情報共有を効率化し、チームケアによる介護の質の向上を図ることが期待できる。
見守りを目的としたセンサには多くの種類があるが、圧力分布センサによりベッド上の姿勢を集中検知することで、次のようなメリットが考えられる。まず、被介護者にとっては寝姿がカラーマップのため、カメラに対してプライバシーが配慮される。一方、介護職員にとっては、詳細な状態判定に基づいた離床に至る一連の動作(例えば、起き上がり→端座位→離床)がアラーム通知されるため、転倒や転落の危険を未然に察知しやすくなる。また、布団があっても入眠や体動を確認でき、アラームが鳴った場合もカラーマップの寝姿から対応の重要度を判断できるため、特に夜間の介護で負担が軽減される。さらに介護施設にとっては、一枚のセンサで見守りに関する複数項目の情報を得られるため、ベッドの足元や背中、サイドレールなどにそれぞれセンサを設置する必要がなく、設備導入や職員教育といった運用管理がしやすくなる。

6.まとめ
圧力分布センサは既存ニーズを充足しつつ、時代と共に変遷する要望に応えるべく様式を変えながら、引き続き活用される要素技術の一つと考える。当社では20年以上にわたり圧力分布センサを販売しているが、材料開発からシステム開発まで一連の研究開発活動に先端技術を取り入れ、これからも社会に価値ある製品を提供していく。
参考文献
【著者紹介】
伊東 孝道(いとう たかみち)
タカノ(株) 技術開発本部 第1グループ
■略歴
- 2005年山梨大学工学部電気電子システム工学科卒。同年、タカノ株式会社入社。大学発事業創出実用化研究開発事業(NEDO)にて、株式会社山梨TLOへ出向。山梨大学大学院医学工学総合研究部/工学部応用化学科で社会人研究員として導電性高分子アクチュエータの研究開発に従事。
- 2008年タカノ株式会社帰任。
- 2009年研究成果最適展開支援事業(JST)にて、財団法人電気磁気材料研究所(現、公益財団法人電磁材料研究所)と金属薄膜を用いた圧力分布センサの研究開発に従事。
- 近年は、スマートテキスタイルを用いた生体計測向け圧力分布センサの開発に従事している。
微粒子可視化技術を用いた評価手法 ~飛沫を題材に~(2)

ソリューション事業部
事業部長
古川 太郎
(3)拡散角度と速度の計測
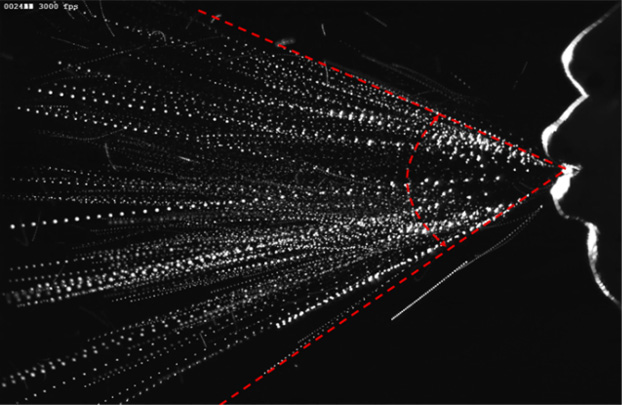
画像4は、微粒子可視化用多機能LED光源 パラレルアイDとハイスピードカメラを使って、咳で発生する飛沫粒子を可視化した事例である。1回の咳を高速撮影(3,000fps,露光10μsec)した連続画像から一部を抽出した輝度加算画像で、画像の実寸は横幅で約20cm、画素当たりのスケールは0.19mm/pixelである。
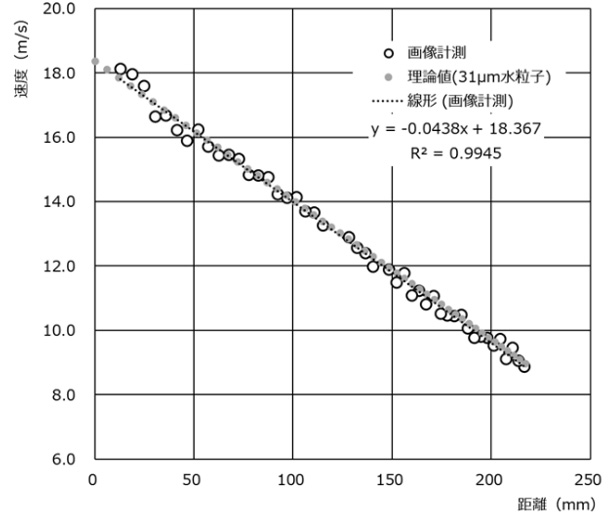
多くの粒子が、約60°の拡散角度で直線的に飛んでいる様子が見られる。この中からある粒子1つの挙動について着目して、輝点と輝点の移動量をフレームの時間間隔で割れば、画像から速度を計測することができる。図3に飛沫粒子の飛散距離と速度の関係を示している。この画像計測値から近似線を得ることで、口から発したときの初速は約18m/sと推測できる。
(4)水平方向への拡散範囲の計測
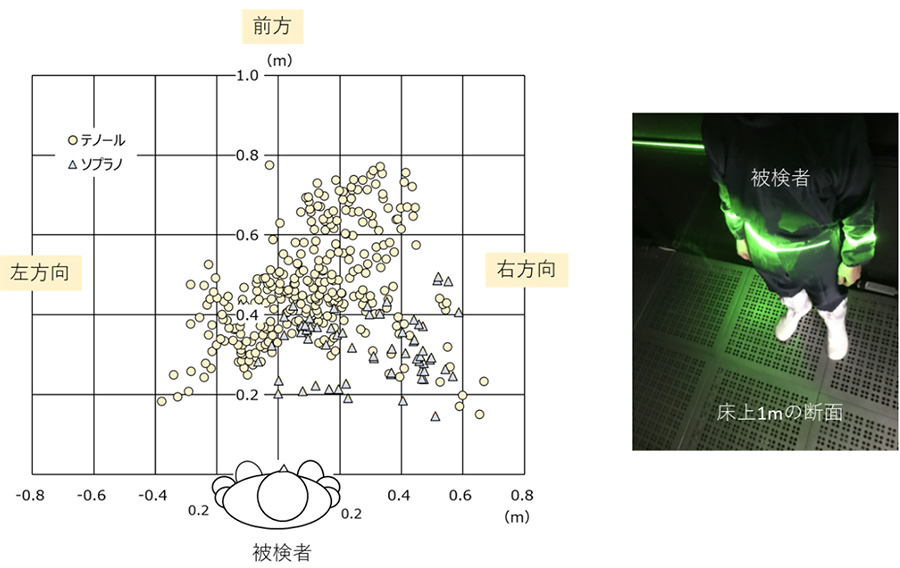
図4は、歌唱したときの床上1mの高さにおける飛沫の分布である。超高感度微粒子可視化用レーザシート光源 パラレルアイHでレーザシートを床上1mの高さにセットしている。ソプラノ歌手とテノール歌手のお二人にご協力頂き、実験室のなかで歌って頂いた。歌唱すると大きな沈降飛沫がレーザシートを通過して散乱光を発する。それらを天井にセットした微粒子可視化用超高感度カメラ アイスコープで撮影して、画像で得た各輝点の位置をもとに点描した。
同じ歌唱でもソプラノ歌手よりテノール歌手の方が広範囲に拡散していること、その範囲は前方に約80cmであり、右に約70cm、左に40cmと左右非対称に拡散していることなど、画像計測によって二次元方向の面的な分析が可能となる。
(5)微粒子の全量計数
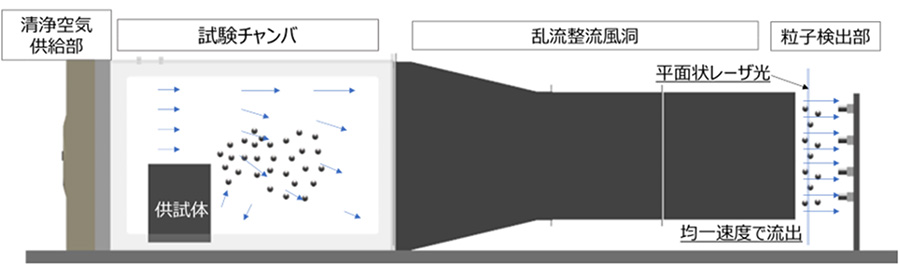
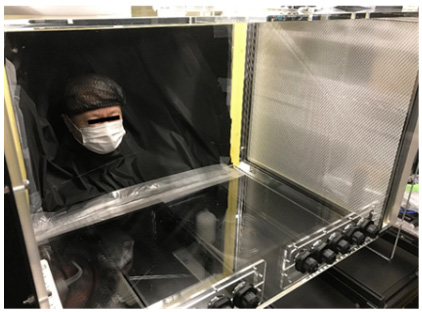
高感度な微粒子可視化技術と微粒子整流化技術を駆使して開発した、微粒子発生量評価装置 P-Wind™を紹介する。前出した事例では、レーザシートをあらかじめ観察断面にセットしておいて、そのレーザシートを通って自然落下する飛沫の拡がり範囲を明らかにした。一方、P-Wind™では、清浄給気供給部と乱流整流風洞によって粒子検出部へ送気し、専用の微粒子可視化装置で高感度かつリアルタイムに計数する。一般的な計測では困難であった、局所的かつ瞬間的な発塵のリアルタイム全量計測を可能にした。
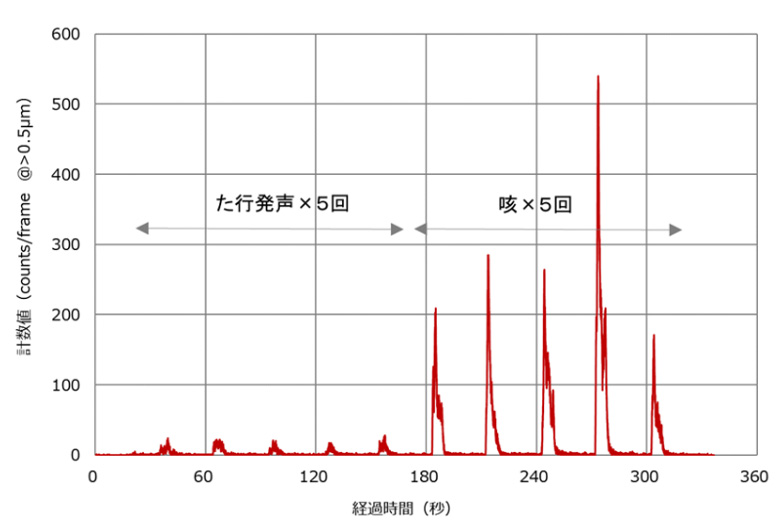
P-Wind™の概要図と、発声と咳で発生する微粒子を測定した事例を図5のグラフに示す。試験チャンバの部分に頭部を挿入して、た行を30秒間隔で5回発声し、そのあと、30秒間隔で5回咳をした。速い応答で測定することができるため、図に示すように微粒子の瞬間的な変化量を捉えることができる。ちなみに個人差はあるが、当実験に協力頂いた被験者の咳の微粒子数は、発声よりも1ケタ多いことが分かる。
(参考動画:https://www.youtube.com/watch?v=v6Khk5usnIc)
5.おわりに
本報では、ヒトの飛沫を題材に、微粒子可視化技術を用いた評価手法について紹介をさせて頂いた。冒頭に少し触れさせて頂いたが、半導体工場での微粒子汚染の原因探索から始まった微粒子可視化技術だが、この何年間かは、コロナに影響を受けた各業界団体から、飛沫に関わるたくさんの実験と対策評価を行ってきた。このとても小さな微粒子だが、社会にもたらす影響というのは決して小さくないということを思い知らされた数年間だったように思う。今後も感度と精度を高めて、現場の技術者に活用頂けるような微粒子可視化技術の研究開発を進めていきたい。
参考文献
- 岡本隆太 「飛沫粒子の可視化と計測の技術及び実例」クリーンテクノロジー Vol.33 No.1 2023
- 古川太郎 「飛沫の可視化実験技術」空気調和衛生工学 95巻 2021
- 新日本空調株式会社ホームページ http://www.snk.co.jp/particle
【著者紹介】
古川 太郎(ふるかわ たろう)
新日本空調(株) ソリューション事業部 事業部長
■略歴
1969年 長崎県生まれ、1991年 九州大学工学部卒、1993年 同大学院修士課程修了。同年 新日本空調株式会社入社、技術研究所(当時の呼称) 室内環境工学研究室で、空調制御用体感温熱センサや外皮負荷低減技術、ダクト騒音の消音装置などの研究開発に関わる。2001年に同社の独自技術である微粒子可視化技術の研究開発に携わり、以降、同技術を中心に据えた受託評価業務や可視化商品の販売を押し進め、現在は微粒子可視化技術の適用拡大と顧客深耕に取り組んでいる。
Vicorの高電力密度電源、AIを用いた高感度監視ネットワークに採用、犯罪防止に

Vicor Corporationは、ロボットを使った監視セキュリティサービスを提供するナイトスコープ社が、Vicorの電源モジュールを採用したと発表した。
警備を自動化するという構想は何年も前にSFの世界で始まったが、今ではその構想は現実で、強いインパクトがある。
ナイトスコープの共同設立者兼最高顧客責任者のステイシー・スティーブンス氏が、ロボットによって高度化するセキュリティ技術について興味深い話を紹介する。
2013年、カリフォルニア州マウンテンビューの公共安全技術サービス会社として発足したナイトスコープは、ショッピングモールや駐車場、近隣の公園などの公共スペースに移動式の完全自律型セキュリティロボット(ASR)を世界で初めて配置した。ナイトスコープのビジョンは、警察官のリスクを最小限に抑えつつ、犯罪を防止するためのより効果的な手段を見つけるというものだった。
ナイトスコープは、自動運転技術、車両電動化、人工知能を融合した専門技術を持つロボティクス企業というより、むしろ公共安全技術のリーディングカンパニーである。これらの技術を組み合わせ、多様なセンシング機能やその他の技術を統合して、実用的な調査・警護ができる機動性の高いプラットフォームを生みだす。
●ASRによる優れた監視能力の実現
ASRは既知の脅威を見つける機能を備えており、解雇された従業員や不法侵入の警告を受けた人物を認識することで、職場での暴力事件を減らすことができる。また、ASRに備わる例外監視機能で車両のナンバープレートから部外者を識別し、駐車場内を警備することができる。ASRの音声機能を使うと双方向コミュニケーションが可能であり、ロボットはブロードキャストスト機能を備えた拡声装置として動作する。これにより敵対する状況を収束させるために加害者と交渉ができる。
●ASRの自律運転を進めるテクノロジー
ナイトスコープのモバイルロボットはLIDAR、GPS、ソナー、IMU、4Kカメラ、Hi-Fiオーディオのシステムを使用しながら、完全に自律して動く。ロボットには人間の五感のように5種類のセンサが搭載されていて周囲を監視する。ほとんどの場合、ロボットのセンサは警察官の五感より鋭敏である。
合計21個のLIDARレーザーにより、25ミリ秒ごとに周囲をマッピングする。そのデータをもとに、半径100mまでの3Dマップを作成し、ASRが周囲を「見る」ことを可能にしている。さらに、ソナーセンサが近接センサとしてはたらき、何かが物理的に近くにある場合にロボットに知らせる。GPSが自律航法の第3の入力として搭載されており、誰かがロボットを動かしたり盗んだりした場合に、マシンを追跡するのに役立つ。
走行距離センサを用いてホイールの回転を計算し、ロボットが左または右に移動/追跡していれば、表示する。最後に、慣性計測ユニット(IMU)により6DoF(6自由度)の空間認識を行い、ロボットが直立しているか傾いているかを判断し、立ち往生したり動けなくなったりした場合に知らせることができる。(以下略)
ニュースリリースサイト:https://www.vicorpower.com/ja-jp/press-room/knightscope-robot
サイバーリンクとマクニカ、GROOVE XのLOVOTにFaceMe® を搭載

サイバーリンク、および(株)マクニカはGROOVE X(株)の家族型ロボット「LOVOT(らぼっと)」にサイバーリンクのAI顔認証エンジンFaceMeを搭載することを発表した。
LOVOTは、頭部に搭載されているセンサーホーンの全方位カメラを通して人の顔を認識し、撫でたり、名前を呼んだりして可愛がってくれる人のことを記憶して、よりその人に懐いていく。
FaceMeが採用されることで、角度がついてカメラから見える顔の画像が歪んでいる場合でも、同一人物として特定する精度が向上する。
これにより、一緒に生活する中でLOVOTはいろいろな角度からオーナーを的確に見つけて、今まで以上に見つめたり近づいたりといったインタラクティブなやり取りが楽しめるようになるという。
【家族型ロボット、LOVOT(らぼっと)とは】
『LOVOT』は、名前を呼ぶと近づいてきて見つめてくる。好きな人に懐き、抱っこをねだる。抱き上げるとほんのり温かい。ロボットなのにまるで生き物のような生命感があるのが特徴で、ペットのようにだんだん家族になるロボット。
約4年の歳月を経て出荷を開始、その愛らしい見た目からは想像できない最先端テクノロジーに込められた技術力が評価され、国内外問わず数々のアワードを受賞。世界中で評価され、今最も注目を集めているロボティクスのひとつ。近年はコロナ禍におけるメンタルケア、情操教育、プログラミング教育などの観点からも注目されており、全国の保育園、こども園、小学校などの教育施設や介護施設、企業などにも導入されている。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000200.000055543.html
KDDIが商用展開のO-RAN準拠の5G仮想化基地局にHPE のTelcoサーバー

ヒューレット・パッカード エンタープライズ(HPE)〔日本ヒューレット・パッカード(同)〕は4月10日(月)、KDDI(株)が大阪府大阪市で商用展開を開始した、O-RAN準拠の5G仮想化基地局(以下本基地局)に利用されているサーバーを提供し、設定作業の自動化 (Zero Touch Provisioning)を含むサーバーの統合管理・運用システムの構築支援をしていることを発表した。
KDDIは、5Gサービスにより拡大する移動体通信用途、端末種類の多様化や増加により、急速な増大が予想される通信量に対応するため、O-RAN標準インタフェース準拠のオープン化した5G仮想化基地局の商用展開を開始している。オープン化した5G仮想化基地局の導入は、機器調達の選択肢を拡大し、システムの高度化、迅速な展開、コスト優位なインフラの構築に寄与すると期待される。
本基地局に利用されているHPE ProLiant DL110 Gen10 Plus – Telcoサーバーは、vRANワークロードを処理するために最適化され、高い収容効率および電力効率を実現する。また、優れた耐性により寒暖差や荒天などにも強靭性を発揮する特性を活かし、D-RAN(Distributed Radio Access Network)環境においても本サーバーが利用されている。さらに、HPE InfoSight for Serversの導入により、HPEのTelcoサーバーの障害予兆検知、運用保守の負荷軽減を実現する。
今回KDDIはAnsibleを活用したサーバー機器の初期設定と検証、仮想化基盤の展開を自動化して、基地局を迅速に展開可能とするZero Touch Provisioningシステムを構築した。この中で、HPEのプロフェッショナルサービス部隊は、AnsibleにHPE OneViewを組み合わせ、テンプレートベースで設定作業およびライフサイクル管理を自動化する機能開発を支援した。電源投入を契機に初期設定としてHPE OneViewおよびHPE InfoSight for ServersにHPE のTelcoサーバーを自動登録し、HPE iLOによるアプリケーションの要件に応じたファームウェアやシステムソフトウェア(BIOSやドライバー)の設定、ハードウェアの診断から、SSDディスクのデータ消去をはじめとする機器情報全般の初期化までのサーバー管理を実現する。このように構築と運用におけるシステムのライフサイクルの全般を自動化することで、地方などを含む日本全国への迅速な基地局展開と安定したサーバー運用を可能とする。
■HPE OneViewについて
HPE OneViewは、IT管理と運用の自動化を実現するソフトウェアデファインドインフラストラクチャの基盤。様々なワークロードをコードのように構成することができ、様々なプラットフォームとの統合、コアからクラウドにわたるインフラストラクチャを繋げることを可能にし、インフラストラクチャの迅速な展開、ライフサイクル運用の簡素化、生産性の向上を支援する。
詳細はhttps://www.hpe.com/jp/ja/integrated-systems/software.html
でご確認のこと。
■HPE InfoSightについて
インフラストラクチャ向けAI OpsであるHPE InfoSightは、インストールベースのセンサーから絶えず収集するデータの分析に基づいて、サーバーおよびアプリケーションの異常検知、推奨する対処方法の提示、問題の予測と防止を担う。
詳細はhttps://www.hpe.com/jp/ja/solutions/infosight.html
でご確認のこと。
※添付画像はイメージ。
ニュースリリースサイト(hpe):https://www.hpe.com/jp/ja/japan/newsroom/press-release/2023/041001.html
動作システムの高性能化・高効率化に貢献する初のAI拡張型スマート加速度センサ

STマイクロエレクトロニクスは、先進的な処理エンジンを内蔵し、センサの自律性を向上させた新しい加速度センサ3製品を発表した。これらの製品は、外部イベントに対するシステム応答時間の短縮と消費電力の低減に貢献するという。
「LIS2DUX12」と「LIS2DUXS12」は、STの第3世代MEMS技術を採用し、機械学習コア(MLC)、先進的なステート・マシン(FSM)、高性能の歩数計など、プログラム可能な機能が追加されている。「LIS2DU12」は、エントリ・レベルの加速度センサで、比較的要件の厳しくないアプリケーションに利用可能。全3品種に最新の業界標準であるI3Cインタフェースが搭載されている。また、イベント検出用に共通のデジタル機能を搭載している他、低サンプリング周波数で高精度を実現するアンチエイリアス・フィルタが内蔵されているため、わずかな消費電力で高精度のジェスチャ認識が可能である。
LIS2DUX12およびLIS2DUXS12に搭載されたMLCが、人工知能(AI)アルゴリズムによる信頼性の高いアクティビティ検知を可能にし、FSMが動作の認識精度を向上させる。同時に、センサ内部で自律的に処理が実行されるため、ホストによる通信・処理が不要で、大幅な消費電力低減とシステム応答の高速化が実現する。また、自己構成機能(ASC)が搭載されており、センサ単体で設定値(測定範囲や測定周波数など)を調整し、性能をミリアンペア単位で最適化できる。
LIS2DUXS12には、ST独自のQvar®検出チャネルも搭載されており、周辺の静電環境の変化を検出して、ユーザ検知や近接検知が可能。これにより、ユーザ・インタフェースの制御、液体の検知、生体認証センサ(心拍数モニタなど)といったアプリケーションに付加価値を提供する。ユーザ・インタフェースでは、Qvar®と加速度信号を組み合わせることで、ダブル・タップ動作やマルチタップ動作における誤検出を防止できる。
これらのスマート加速度センサは、最新のウェアラブル機器、完全ワイヤレス・ステレオ(TWS)スピーカおよびイヤホン、スマートフォン、補聴器、ゲーム機用コントローラ、スマート・ウォッチ、アセット管理システム、ロボット、IoT機器におけるコンテキスト認識を実現する。3製品すべてにSTの最新の超低消費電力アーキテクチャが採用されており、超低消費電力機能をアンチエイリアス・フィルタと組み合わせることで、アプリケーションの性能を向上させ、信号から不要なノイズを除去できる。すぐに使用できるMLCおよびFSMアルゴリズムをSTのMEMS GitHubのページから入手可能で、複雑なジェスチャや資産管理など、さまざまなユース・ケースに簡単に使用できる。
これらの優れた機能を搭載したLIS2DUX12およびLIS2DUXS12が実現する次世代アプリケーションは、日常の活動を直観的かつシームレスにサポートし、常時オン、常時認識でユーザのニーズに常時対応する。新たに両製品が追加されたSTのAI搭載MEMSセンサ・ファミリには、2019年に発売された慣性計測デバイス(IMU)が含まれている。
LIS2DUX12およびLIS2DUXS12は現在量産中で12リードLGAパッケージ(2 x 2 x 0.74mm)で提供される。1000個購入時の単価は、LIS2DUX12が約1.38ドル、LIS2DUXS12が約1.43ドル。LIS2DU12も同じパッケージで提供され、単価は約1.20ドル。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000001306.000001337.html
SSC、温度監視の導入負担を軽減する「温度異常監視ユニット」開発

エスエスシー(株)は温度異常監視ユニット「Thermal Watcher(仮)」の開発に着手したと発表した。
【開発の経緯】
本製品は、制御盤内の端子ゆるみによる異常発熱を検知し火災や事故を未然に防ぐためのユニットを低コストで導入したいという顧客ニーズにより開発に着手した。
また、広いエリアの温度監視を手軽に導入できることから、制御盤での使用に限らず様々な用途で使用できる製品を目指している。
同社は、本製品の開発によりユーザーにかかる非接触温度センサの導入負担を減らし、温度監視に関する様々な問題解決を実現できると考えている。
【本製品の特徴】
本製品は、センサとコントローラに分かれており、広いエリアの温度計測と異常監視を同時におこなう非接触型の温度監視ユニットである。
センサは、サーモパイルアレイセンサを使用しており、視野内(縦横90度)を 32×32分割した温度情報が出力されコントローラに送られる。また、筐体に搭載のマグネットにより簡単に設置が可能。
コントローラは、1台に複数のセンサが接続可能で、各センサの最高温度が設定した閾値を越えていないかを判断し、異常時にはアラーム出力する。また、各センサの温度情報はModbus RTU通信で出力され、PLCやPC等の上位機器との接続も考慮されている。
【製品概要】
製品名:温度異常監視ユニット Thermal Watcher
型 番:センサー SSW32-01
コントローラ SRW-100
価 格:オープン価格
発売日:2024年夏を予定
※製品概要は開発途中の内容であり変更される可能性あり。
【本件に関するお問い合わせ】
会社名:エスエスシー(株)
担当者:営業部 渡辺
TEL:0594-33-3080
E-Mail:info@ssc-inc.jp
URL:https://www.ssc-inc.jp
加振レーダによる鉄筋コンクリートの劣化可視化技術(1)

大学院 理工学府電子情報部門
教授
三輪 空司
1.はじめに
高度経済成長時に建設された鉄筋コンクリート(RC)構造物やインフラ施設の多くが50年を過ぎ、老朽化が社会問題となっている。これらのインフラ施設を新たに建設するには莫大なコストを要し、インフラ施設は補修して維持管理することが政府の基本方針となっている。現在、RC構造物の予防保全として、法令により5年に一度の目視観察や打音検査といった表面からの簡易診断が義務付けられているが、RC構造物の劣化要因の多くを占める鉄筋腐食は内部から劣化が進行するため、RC構造物内の非破壊的な鉄筋腐食評価が求められている。RC構造物の鉄筋腐食評価にはこれまで自然電位法等の電気化学的手法が実用的に用いられてきたが、これらの検査方法は鉄筋を一部露出させる微破壊検査であるため広範囲を迅速に評価することが困難であり、コンクリートの乾湿に結果が影響されやすい。また、非破壊的な鉄筋腐食評価法としては弾性波、熱、磁気的手法などがあるが、いずれも高分解能で迅速かつ定量的に腐食量を評価する非破壊手法は存在していない。
一方、電波はコンクリート内のひび割れ等に対する感度が低く、鉄筋に対して高い感度を有しており、高空間分解能かつ高速な非破壊探査法として数GHzのマイクロ波を用いるレーダ法が挙げられる。2次元的なレーダ走査に加え、合成開口イメージングにより、伝搬速度の比較的一様なコンクリートでは深さ数十cmまでの鉄筋の三次元的な配筋状態を容易にイメージングできるなど、完成された技術といえる。しかし、サブミリオーダーの腐食生成物に対し、空間分解能は数cm程度であることや、レーダ反射の振幅情報は水分率分布に大きく影響を受けるため、これまで鉄筋腐食の評価に実用的には利用されてこなかった。
さらに、空中でのレーダ等では古くから応用されている対象物体の位置変化に比例した位相の時間変化に応じて周波数が遷移することを利用したドップラレーダ技術も、計測対象が移動することのないコンクリート内や地中内を対象とした地中レーダでは積極的に使われてこなかった。一方、計測対象が移動しなくとも、その場で微小振動すれば、位相変調によりその振動周波数の整数倍のドップラ変調成分が(遷移ではなく)新たに発生する。レーダの位相安定性は極めて高く、波長の1/1000程度の変位にも感度を有しているため、鉄筋の微小な動きであれば計測可能である。そこで、これまで従来のレーダ技術において検討されてこなかった新たな概念に基づくコンクリート内の振動物体可視化技術として、アクティブに与えられた振動の応答を非破壊的に評価することで、コンクリート構造物の劣化評価する技術について述べる。
2.正弦加振ドップラレーダ法の概要
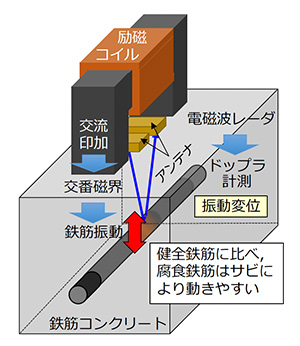 図1 加振レーダの概要
図1 加振レーダの概要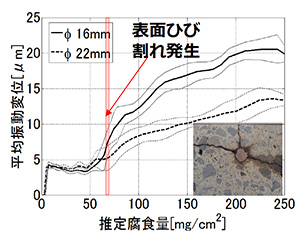 図2 加振レーダによる鉄筋振動変位
図2 加振レーダによる鉄筋振動変位
図2にコンクリート中の鉄筋を強制的に腐食させ、その間の鉄筋振動変位をモニタリングした結果を示す。健全状態では4 µm程度の腐食量であるが、表面ひび割れ顕在化前から振動変位が上昇しはじめ、写真のようなひび割れ発生時には5倍程度まで増加することを明らかにした。一般に、鉄筋腐食に伴い発生する腐食生成物は鉄筋やコンクリートよりもやわらかく、鉄筋振動変位は鉄筋部位の動きやすさを表す指標となる。
3.鉄筋振動変位の空間分布計測
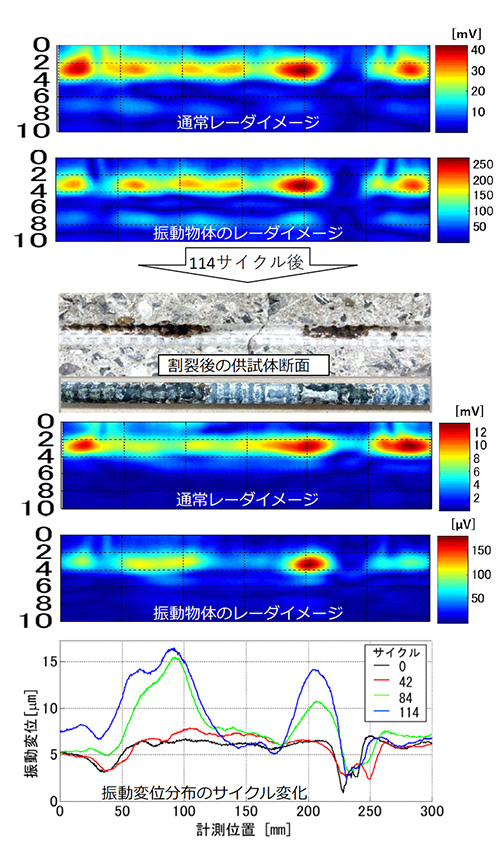 図3 加振レーダスキャンによる腐食RC供試体の鉄筋振動変位分布
図3 加振レーダスキャンによる腐食RC供試体の鉄筋振動変位分布
さらに、この供試体を塩水散布と乾燥、湿潤を繰り返すサイクル腐食試験により腐食させた。この試験は強制的に電流を流す試験に比べ、実構造物に近い黒錆がより多く発生することが知られている。8時間を1サイクルとして114サイクル終了時の供試体の割裂断面や鉄筋には黒錆が付着していることがわかる。そのイメージング結果では、通常レーダのイメージングでは塩水等の影響で反射イメージの振幅が低下しているが、概ね同様なイメージであるものの、振動物体のイメージは通常イメージとは顕著に異なるイメージとなっており、振動変位分布における114サイクル時(青線)では黒錆の付着部位に対応して振動変位が局所的に3倍程度上昇していることがわかる。尚、振動変位は42~84サイクル目で上昇していることもわかる。取り出した鉄筋には顕著な断面欠損は見られず、腐食生成物の量も少ないが、振動変位は高い感度で腐食を検知できている。これは、黒錆自体が磁性を持つことから、鉄筋より動きやすい黒錆の磁性に反応することで黒錆が振動し、鉄筋振動変位の増加として現れたものと考えられる。このように、加振レーダ法はレーダイメージから直接的に黒錆の発生の情報を得られれないものの、その動き易さを捉えることで、高感度な腐食検出性能を有していると考えられる。
4.加振レーダ法の実フィールドへの適用
 図4 実橋梁における加振レーダスキャン計測の様子
図4 実橋梁における加振レーダスキャン計測の様子
図5に鉄筋振動変位の空間分布を示す。300 mm及び600 mmの区間において鉄筋に平行にスキャンして得られた鉄筋直上での振動変位分布を1~1000 µmまでの対数のカラーバーで表示している。振動変位は数µmから数100 µmを超える振動変位がえられ、場所により100倍程度の振動変位のコントラストとなった。
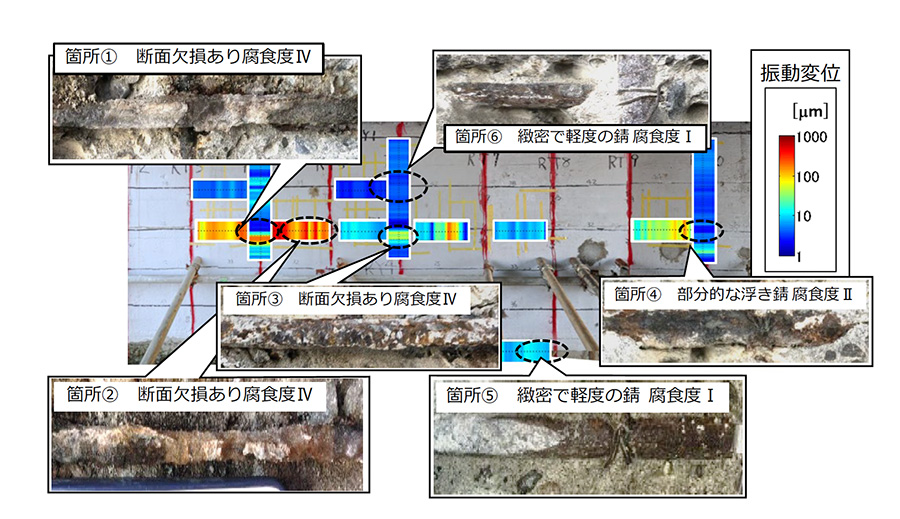 図5 実橋梁における加振レーダスキャンにより得られる鉄筋振動変位分布とはつり結果の対応
図5 実橋梁における加振レーダスキャンにより得られる鉄筋振動変位分布とはつり結果の対応
次回に続く-
参考文献
- T. Miwa, “Non-destructive and quantitative evaluation of rebar corrosion by a vibro-Doppler radar method”, Sensors, Vol.21, No.7, 2546 (2021); https://doi.org/10.3390/s21072546
- T. Miwa and Y. Nakazawa, “Nondestructive Evaluation of Localized Rebar Corrosion in Concrete Using Vibro-Radar Based on Pulse Doppler Imaging”, Remote Sensing, Vol.14, No.18, 4645 (2022);
https://doi.org/10.3390/rs14184645
【著者紹介】
三輪 空司(みわ たかし)
群馬大学 大学院 理工学府電子情報部門 教授
■略歴
1995年 東北大学工学部資源工学科卒業
1997年 東北大学大学院資源工学専攻博士前期課程修了
1999年 東北大学大学院地球工学専攻博士後期課程修了 博士(工学)
1999年 電気通信大学電子工学科助手
2005年 群馬大学工学部電気電子工学科 助手
2011年 群馬大学大学院理工学府電子情報部門 准教授
2021年 群馬大学大学院理工学府電子情報部門 教授
現在に至る
電磁波を使った地下計測特にボアホールレーダの研究で学位取得、その後、地中レーダのハードウエア、信号処理、超解像アルゴリズム、超音波による生体内の硬さ評価システム、加振応用イメージング、バケット前方探査用地中レーダ、ドリル先端モニタリングレーダ、加振レーダによるコンクリート内の鉄筋腐食、劣化評価の研究に従事
超音波を活用した養殖魚自動尾数計測システム『MagicCounter』(1)
東北学院大学 教授
松尾 行雄
1.はじめに
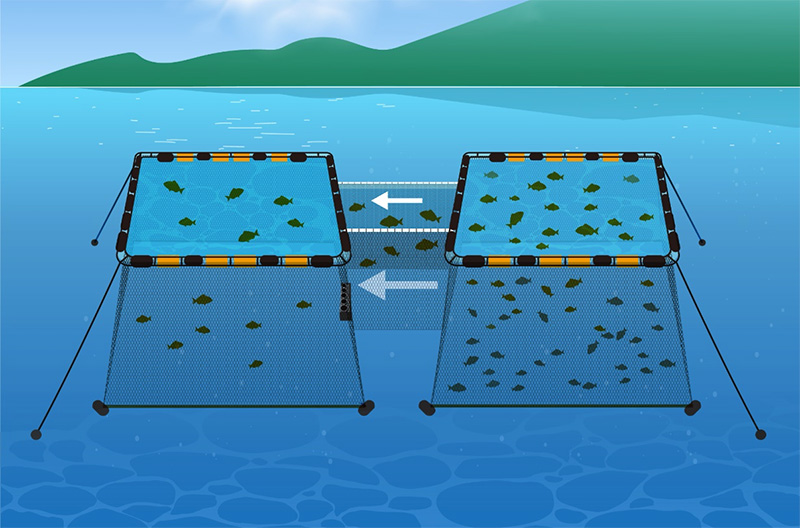
養殖漁業には海面養殖と陸上養殖がある.海面養殖の場合,海中に網の生簀を作り,その中で魚介類を養殖している.稚魚の段階で海面の生簀にいれて生育を始めるが,魚の成長とともに生簀内が狭くなる.生簀内の養殖魚を適切な密度に保つため,養殖魚が成長すると「分養」という,一部の魚を他の生簀に移す作業が行われる.生簀内の密度を生育に適した状態に保つためには予定した個体数を確実に分養する必要があり,いくつかの方法で分養が行われている.例えば,タモ網で魚をすくって隣の生簀に移す方法がある.この場合,1回ですくえる尾数には限界があり,数千尾の分養においても時間と労力がかかる.その10倍以上の数万尾の分養の場合には,タモ網ですくう方法では時間的にも労力的にもおおきな問題となる.そこで,短時間に分養する方法として,生簀と生簀の網の一部をつなぐことで魚道をつくり,分養させる方法がある.この時の分養の様子を模式的に図1に示す.この場合,魚道を通過する魚の尾数を目視でカウントしているが,大量の魚が同時に通過するため,目視で正確な通過尾数を把握することことは困難であり,分養における根本的な課題となっていた.これまでに,水中カメラを用いた方法も提案されているが,マダイの分養のように密に魚が移動する場合,前の魚の存在により後の魚を遮蔽するため,密度によっては魚道を通過するすべての魚を把握することができなくなる可能性がでてくる.この課題を解決するために開発された超音波を活用した生簀の自動尾数計測システムMagicCounterについて本稿では紹介する.次項では,最初に魚群探知機の特徴,ならびに,超音波を用いた魚検知原理について紹介する.そのあとに,MagicCounterについて紹介する.
2.超音波を用いた魚検知原理
超音波を用いた魚検知は魚群探知機を用いて,研究・開発が行われている.魚群探知機の原理は,超音波を送信し,反射してきたエコーを受信し,受信したエコーを表示するものである.計測されたエコーを用いて魚の資源量評価に活用されたり,漁業者の漁の判断などに用いられている.従来の魚群探知機では狭帯域信号を用いて,エコーを計測しているため,一尾一尾の魚の反射としてではなく,その名の通り,魚群としての反応を計測できるが,一尾一尾の魚のエコーを分離してとらえることができない.それに対し,広帯域信号を送受信できるシステムが2000年代に開発され,広い周波数帯域幅により距離分解能を向上させることで,魚群ではなく魚1尾ごとにエコーを検知できるようになった1).狭帯域信号と広帯域信号の魚群からのエコーの差を模式的に表したのが図2である.AquaFusionでは,携帯電話等の通信で使用されている疑似雑音符号を用いた高解像度魚群探知機AquaMagicを開発した2,3).疑似雑音信号の1種であるゴールドコードの符号に合わせて位相変調させ送信信号を用いている.具体的には,送信周波数は240kHzで,送信長は1.05msの信号となる.送信回数を1秒間に20回程度まで上げることにより,従来と比べて10倍程度になるのでより精度の高い水中探査が可能となり,現在漁業者だけでなく,資源量評価のための魚群探知機として活用されている.
これら広帯域信号や疑似雑音信号を用いた場合,受信した信号を送信信号との相関解析を行い,深度ごとのエコーデータとして評価できる.ここでは,カタクチイワシを対象とした結果例を示す.カタクチイワシは数cm程度の魚体長で煮干しの原料でもあり,海洋生態系においても重要な役割を果たしている.また,密な魚群を構成していることから,一尾一尾とらえることが困難な魚種の一つである.図3(a)にカタクチイワシの魚群に対して,高解像度魚群探知機AquaMagicで計測したエコーデータを示す4).エコー強度をグレイスケールで表示しており,相関解析により分解能が数cm程度となり,カタクチイワシの魚群に対して,個々の魚を分離できている.分離された個々のエコー強度から距離深度補正等を行うことによって魚の反射強度(TS)を計算し,魚体長を評価できる.図3(b)に検出された魚の体長分布を示す.数cm程度の魚群であり,かつその尾数も評価できる.MagicCounterでは,このような単体検知アルゴリズムを活用して,生簀間の魚道を通過する尾数をカウントする.
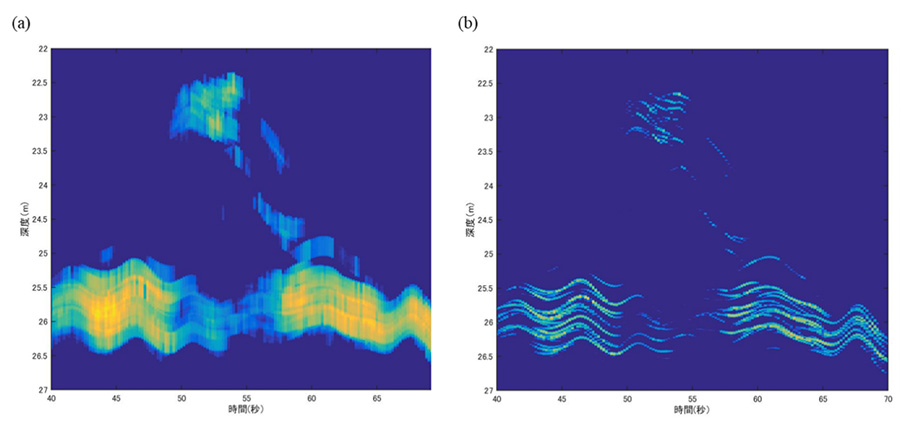
(左)狭帯域信号を用いた魚群探知機のエコーグラム,(右)広帯域信号を用いた魚群探知機のエコーグラム.
広帯域信号を用いることで,魚単体のエコーを分離できている.
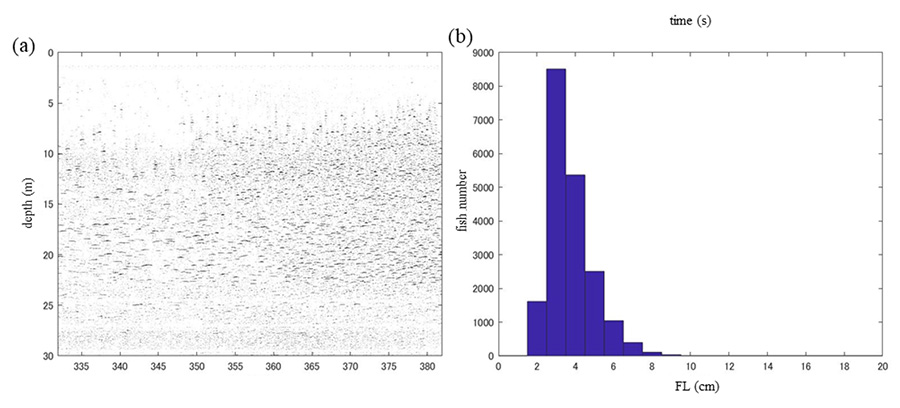
(a) エコーグラム(横軸が時間,縦軸が深度),(b) 検出された魚体長分布(松尾(2022)の図2を引用).
次回に続く-
参考文献
- I. Matsuo, T. Imaizumi, T. Akamatsu, M. Furusawa, Y. Nishimori : Analysis of the temporal structure of fish echoes using the dolphin broadband sonar signal, J. Acoust. Soc. Ame. 126, 444/450 (2009)
- 松尾行雄, 笹倉豊喜,“疑似雑音系列信号を用いた海底探査アルゴリズムと実測による評価I”, 海洋音響学会講演論文集,53-54 (2016).
- 松尾行雄,笹倉豊喜,“高速送信周期エコーサウンダーAquaMagicを用いた魚群密度・魚体長の推定アルゴリズムの開発”,海洋音響学会講演論文集,19-20 (2020).
- 松尾行雄,“野生水中生物探査に挑む”,計測と制御,61, 15-20 (2022).
【著者紹介】
松尾 行雄(まつお いくお)
株式会社AquaFusion取締役 / 東北学院大学教授
■略歴
次世代水中可視化システムを開発するAquaFusionの共同創業者・取締役.山口県出身.2000 年東北大学大学院工学研究科電気・通信工学科博士課程退学.2001 年博士(工学).2000年から東北大学電気通信研究所助手,産学連携研究員等を経て,2005年東北学院大学教養学部准教授,2015年同教授となり,現在に至る.2017年株式会社AquaFusion設立.