東京工業大学名誉教授
はじめに
多方面においてセンシング技術への強い期待が寄せられている。計測技術の長い歴史を振り返ってみても、その時代のその時の状況の要請に従い様々な役割を果たし、多くの社会的貢献を為し続けてきたことが分かる。今、その延長線上にあって、計測技術は今後も益々種々の貢献に寄与して行くものと考えられる。
1.計測技術の歴史の概観
周知のように計測技術には度量衡に始まり現在に至るまで極めて長い歴史が有り、土木工学にも匹敵するものであり、社会の変遷に伴い、新しい機能を付加・実現すると共に、その時代の要請に応じた様々な役割を果たして来た。
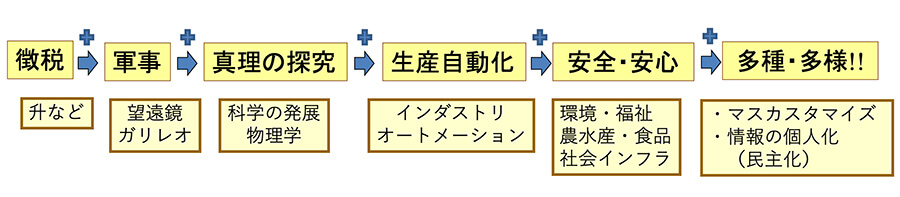
図1 計測技術の役割の変遷
税金が穀物の体積で納められた時代、徴税時の升は大きく、給料支払い時の升は小さくするようなことが起きれば公正さを欠くことは明らかで、計測の標準化は社会的に重要である。計測の客観性が公正さの基盤となる。
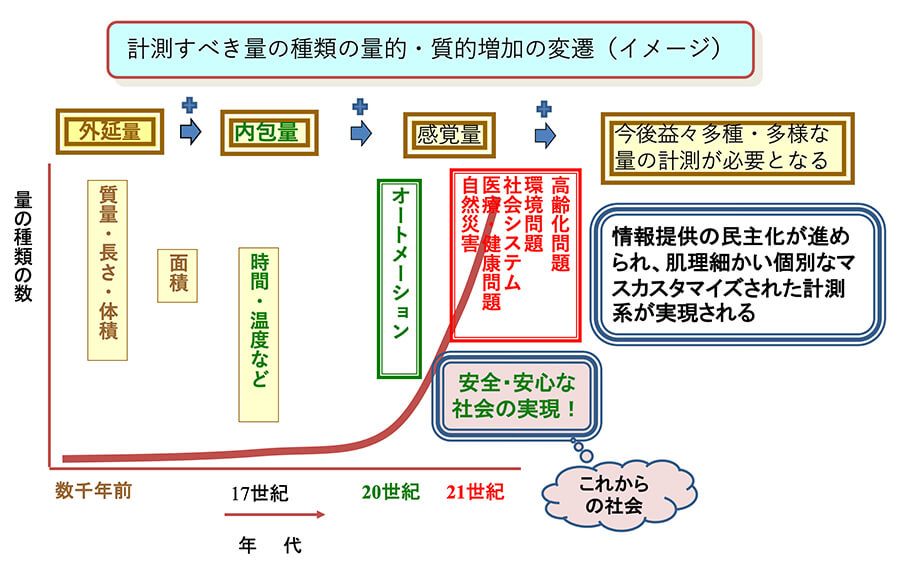
図2 計測量種類の量的・質的増大の歴史
図2において重要なことは、20世紀半ば、第二次世界大戦後いわゆるオートメーションが始まったが、この本質は、製造業における製造工程の機器計測化・自動化であり、センシング技術の別の効用が発揮され、同時に計測すべき量の種類の爆発的増加が起きていることで、極めて興味深い。
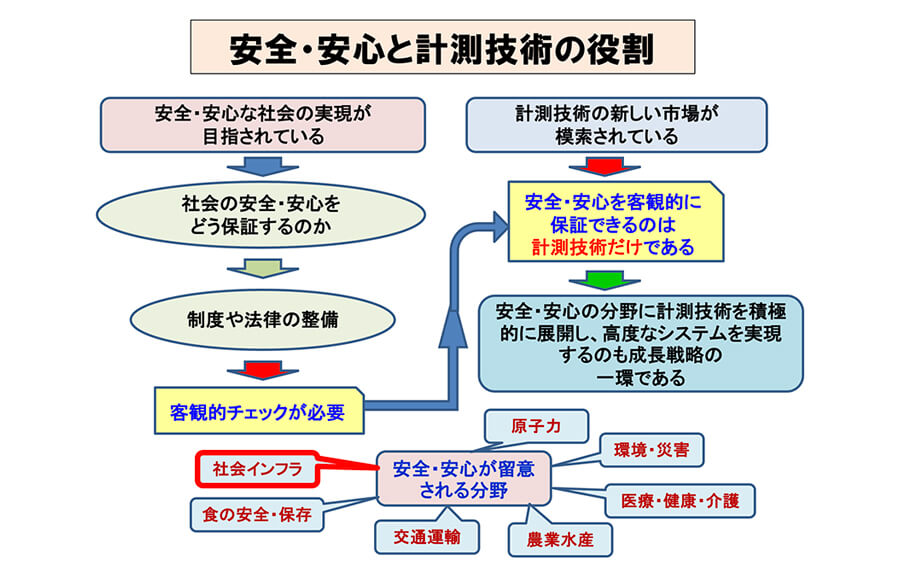
図3 安全・安心を客観的に確認するセンシング技術
2.DX化が叫ばれる中で
周知のように、DX(Digital Transformation)とは、スウェーデンのウメオ大学教授であるエリック・ストルターマン氏が2004年に提唱した概念で、「ITの浸透が、人々の生活をあらゆる面でより良い方向に変化させること」とされる1) 。2) 。
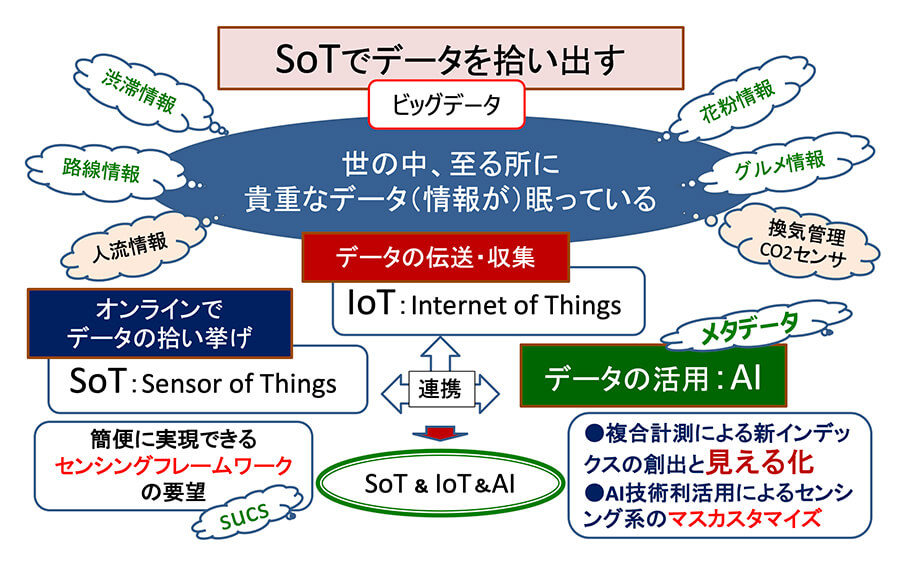
SoT:Sensor of Things
IoT:Internet of Things
AI:データの活用
図4 DXの実現:SoT、IoT、AIの緊密な連携活用
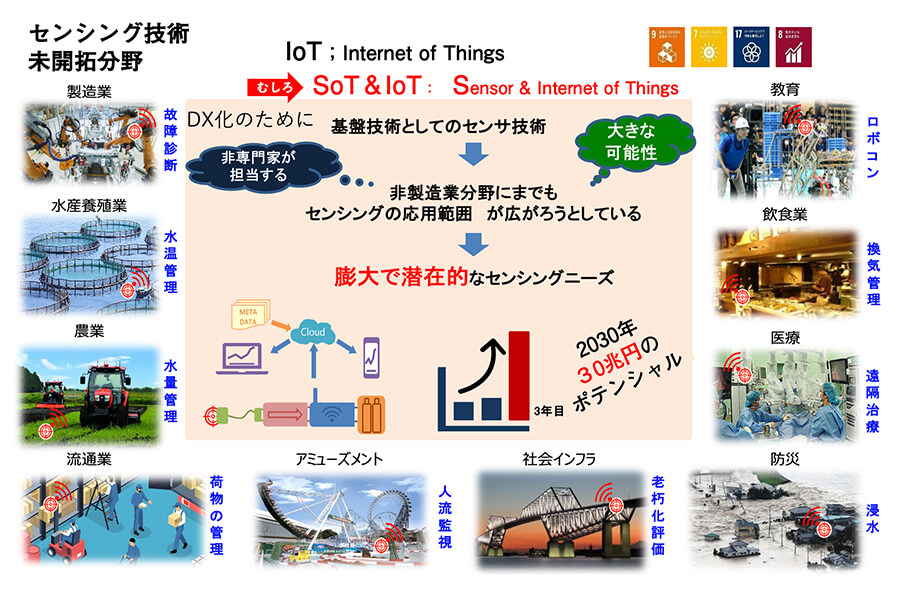
3.膨大で潜在的な新センシング技術市場の開拓
センシング技術の新たな役割を考える上で重要なことは、センシング技術が何に適用されようとしているのかである。
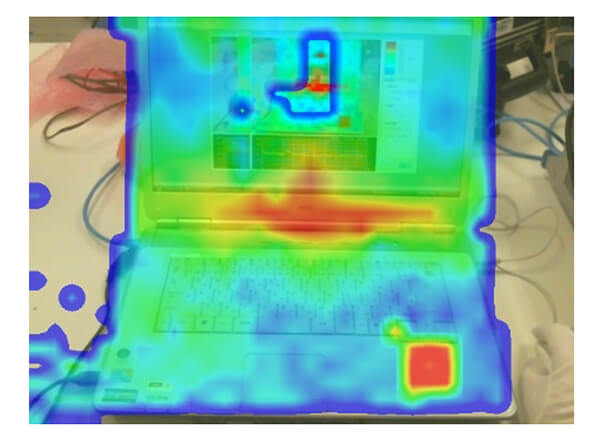
図5 潜在的で膨大なセンシングニーズの開拓
そのような分野は極めて広く、多種・多様であり、具体的ニーズは必ずしも明確にはなっていない。その意味でニーズは潜在的である。しかし膨大な多量のセンシングニーズがあるとされる。また、分野が異なれば、見える化すべき評価インデックスも異なってくるものであり、評価インデックスを確立するためには、その顕在化手法の開発を鋭意検討しなければならない。
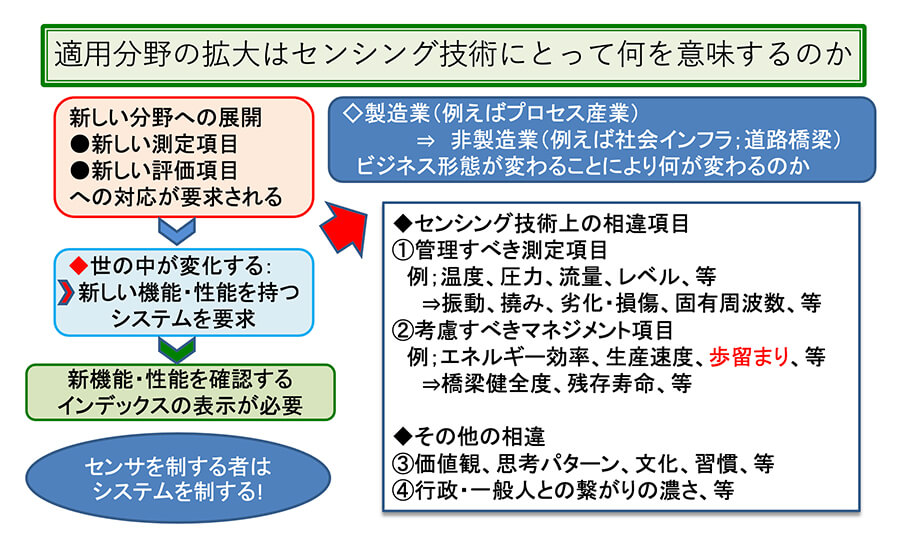
4.新分野への展開と新しいセンシング技術の開発
前述したように、SoT、IoT、AIの緊密な連携によりDX化を始める訳であるが、これに伴い新しい分野へ展開する為のセンシング技術の開発に直面することになる。
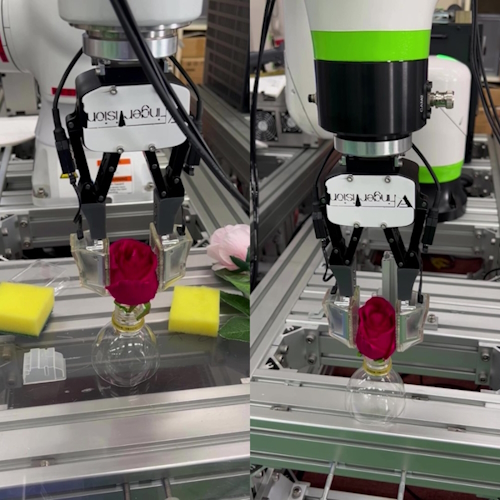
図6 分野が違えばセンシング技術も異なる
図6にも見られるように、「センサを制する者はシステムを制する!」の言葉にある通りであり、このような効用を考えると、センシング技術が世の中を向上させまた変革させる原動力ともなることが分かるが、これはセンシング技術が社会に貢献できるまた別の側面であり、留意すべき役割である。
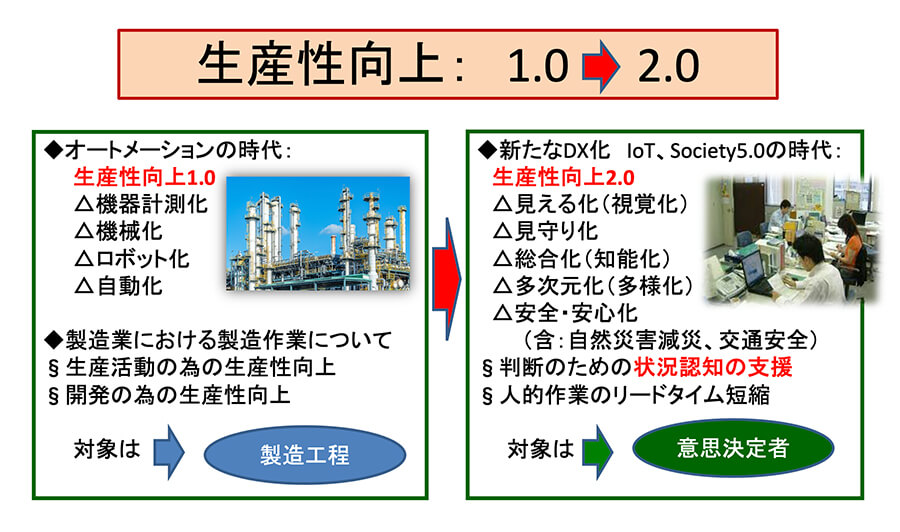
5.センシング技術導入の効用:生産性向上1.0 から 2.0へ
既に触れたように、嘗て、オートメーション化の時代、デジタル技術活用は多くはなかったかもしれないが、今から振り返ってみると、DX化の先触れではあった。そこでは結果として製造業における生産性向上が図られ、世の中は大きく変化した。
① 製造作業
② 社会インフラ作業
③ 人間作業
この内、①は過去オートメーション化の実績もありDX化が最も進んでいる作業である。勿論、今後も更なる進化を目指し、持続的開発がなされることを期待したい。
図7 生産性向上1.0と2.0の対比
図7に関し、自然災害減災ついて、センシング技術の複合計測化、予測技術の必要性等、センシング技術の新しい役割と期待が議論されているが、ここでは割愛したい。
6.客観的事実の提供を目指して
前章までにおいて、センシング技術を俯瞰的に捉えたとき、社会的貢献としてどのようなことに寄与できるのかを考えてきたが、最後にセンシング技術の持つ特殊であるが重要な役割について2・3述べることにしたい。
6.1 サッカー競技におけるVAR(ビデオアシスタントレフリー)の衝撃
未だ記憶に新しい人もいると思うが、サッカーのカタール・ワールドカップ(W杯)で、日本は2022年12月1日、スペインに2-1で逆転勝ちし、決勝トーナメント進出を決めた。1-1の後半6分に田中碧が2点目を入れたが、直前にゴールラインを越えていたのではないかと海外で論争に発展した。これに決着をつけたのがVARで、FIFAは「使用できる証拠では、ボールは完全には外に出ていなかった」と見解を示している。
問題となる瞬間(田中碧がボールを蹴った時刻)の特定:画像のフレームレート(何枚/秒)は
その時刻にボールを写している多方向からの画像の切り出し:ビデオ画像間の時刻同期性は
多方向からの画像情報と三角測量的解析によるボール位置の同定
ゴールラインとボール位置の関係を明らかにする画像の表示
以上のような処理に基づくと考えられる情報が提供され、その上で、ボールは完全には外に出ていなかったと決定された。ルール上は審判が最終判断するものとされている。
6.2 数値モデル出力は現実ではない:現実を把握するのはセンシング技術
デジタル技術が大きな発展を示しその利用は広く行き渡り、社会的にも多くの恩恵を受けている。その便利さは言うまでもなく、チャットGDPに見られるようにその可能性は通常の人間の活動の範囲を脅かすまでになろうとしている。
6.3 計測による事実の確認無くして何の証明・検証か
最近の傾向として、大学等教育研究機関において、講義も含めセンシング技術への関心が薄らいでいるとの話を聞くことがある。大学等においては、新しい技術・理論が創造されその新規性が競われる訳であるが、事実として新しい「物」が創出されたことが証明・検証されなければ議論は無意味である。
おわりに
以上、センシング技術が社会に如何に貢献するのかに就いて考察した。幅広い貢献につき実績もあり今後の可能性も多大である。従って、センシング技術の重要性を改めて再認識すると共に、その利活用に鋭意努め、延いては、潜在的なセンシングニーズを開拓し、膨大なセンシング市場を実現しようではありませんか!
【著者紹介】 小林 彬(こばやし あきら)
■略歴 東京工業大学 保険管理センター所長
■賞罰 電気学会編、オーム社発行(1991)