
海洋未来イノベーション機構
織田 洋一
4.洋上風力発電技術の進展
4.1 風車の大型化
陸上風車と洋上風車との最大の違いはその大きさである。発電量は風車ブレードの受風面積に比例するので、風車を大型化すると出力あたりの建設費用や発電コストを低減させることができる。
陸上では、道路や交差点などが輸送可能寸法の制限となるため、風車の大型化には限界があるが、洋上では、積出港から洋上建設サイトに海上輸送できるので風車を大型化できる。欧州で2011年頃に建設された洋上風車は定格出力3.6MW、ローター直径104m前後のサイズが主流であったが、2019年には定格出力12MW、ローター直径220mの洋上風車の実証機が建設された。2020年以降は定格出力10MW超の大型風車が建設され、50階建の高層ビルよりも高い風車が洋上に立ち並ぶ時代に入る。尚、現在、定格出力10MW以上の大型洋上風車が製造できる主なメーカーは、Siemens-Gamesa,MHI-Vestas,GEである。
4.2 風車技術の進展
風車技術では、ギアボックス(増速ギア)を使わずレアアース磁石等を利用したダイレクトドライブも登場し、ナセルの軽量化と故障率の低減が図られている。大型風車用のブレードは、従来の製造方法とは異なり、長大な鋳型を利用した2分割成型と中空構造が採用されている。LiDAR(Light Detection and Ranging)を利用したリアルタイム風況観測データとデジタル制御システムの統合による発電量の最大化やIoT技術を駆使したシステム監視の高度化などが図られている。台湾や日本などの落雷に耐えられるClass-T仕様の風車も開発されている。
4.3 着床式洋上風車
現在まで商業発電ファームの主流は着床式で、主に水深の浅い北海南部の海域を中心に多くの洋上風力発電ファームが建設されている。海底基礎は、水深2~10m程度の浅瀬で重量基礎が用いられた時代もあったが、現在は水深30m前後の海底にモノパイル鋼菅を打込む方式が主流である。水深45m程度の深い海域になると4脚式ジャケットなどが用いられ、砂地海底では設置コストが安価なサクションバケットが海底基礎部に用いられた事例もあるが、現在では、モノパイル鋼管も最大直径が約11mに拡大されたため適用水深が深くなっている。
着床式洋上風車の設置工法の特徴は、建設用クレーンを装備したSEP(Self Elevating Platform)を使用することであり、SEP船はダイナミックポジショニング(DP)と複数のスラスターを装備した自走式船舶が主流である。現在は洋上の建設時間を短縮するために、風車タワーは予め積出港の岸壁で1本に組み立てられSEP船で積出される工法が主流になっており、風車大型化等に伴いSEP船のエプロンサイズの拡大とクレーン能力の増強が図られている。

4.4 浮体式洋上風車
世界で初めて商業風車が実海域で運転されたのは2009年にEquinor(当時の社名はStatoil)がNorway沖に設置したHywind Demo (2.3MW風車)で、商業風車の浮体式利用の歴史は約10年に過ぎない。現在では様々な型式の浮体が世界の海域で実証開発されており、浮体に用いられる材料も鋼材のみならず、2018年にフランス沖で海域実証運転を開始したFLOATGEN(出力2MW)の様にIdeolが開発したコンクリ―ト製浮体も登場している。
係留方式はカテナリー係留が主流である。海底アンカリングは海底地質や潮流条件等に適したアンカー等が選定される。海底地質が砂地の場合にはサクションバケットが用いられた事例もある。
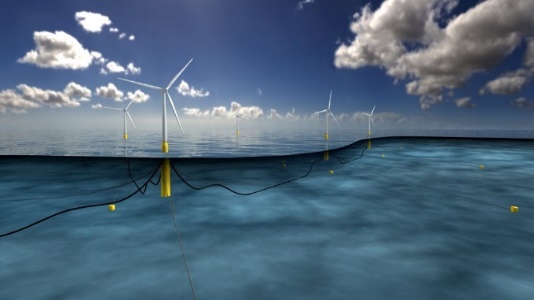
浮体式の魅力は水深が深くても風況の優れた海域に設置できることである。現在の発電コストは着床式より高額であるが、欧州では今後10年以内に浮体式風車の発電コストが着床式風車並みに低減されるかそれを凌ぐと予想されている。例えば、浮体式洋上風力発電の商業化で先行しているEquinorの開発目標は2030年までに浮体式の発電コストを40~60ユーロ/MWh (4.8 ~7.2円/kWh (1ユーロ=120円換算))に低減することである。
今後、浮体式の発電コスト大幅低減の鍵を握るのは出力10MW以上の大型風車の浮体式利用だと思われる。例えば、既存造船所のドックサイズを超えた浮体の製造技術、クレーン船を用いずにスパー型浮体と風車を接合する技術、キールがぶら下るテトラ型浮体、新たなセミサブ型浮体など各種のコンセプトの中から有望な技術が選定され、海域実証試験を経たのちに、今後10年以内に実用化される可能性が高い。
浮体式の発電コストが着床式並みに低減されれば、北海北部海域、英国西岸沖、地中海沖、米国西岸沖、韓国南岸沖、日本などの水深の深い海域で浮体式洋上発電が普及すると期待されている。
4.5 洋上風力発電ファームの沖合進出と保守管理体制
欧州の洋上風力発電ファームの離岸距離は年々遠くなり水深も深くなっている。欧州で2019年に建設された洋上ファームの平均離岸距離は35kmで平均でも領海(沿岸基線から12海里以内または約22.2km以内)外側のEEZ(排他的経済水域)に位置しており、平均水深は33mであった。この様に欧州では洋上風力発電ファームが領海を超えた沖合に展開されており、離岸距離が100kmを超える洋上風力発電ファームも建設されている。
洋上風力発電は沖合に展開すると風況の良い海域を利用できる。例えば、平均風速が15%速い沖合では同じ風車でも発電量が50%以上増加するので、発電量の増加率が沖合進出による費用の増加率を上回れば発電コストを低減させることができる。また、沖合の洋上風力発電ファームは、陸上の系統接続に有利な場所を海底送電線の陸揚げ地点に選定できる特徴がある。
沖合プロジェクトでは洋上の保守管理も従来と異なる体制で実施されている。従来、離岸距離が近い洋上風力発電ファームでは、小型高速船をCTV(Crew Transfer Vessel)として利用していたが、沖合プロジェクトでは大型船をSOV(Service Operation Vessel)として利用し、洋上で生活しながら保守管理作業を実施し、2週間に1回程度、沿岸の基地に戻って要員交代や部品積込み等を行っている。SOVにはインターネットを完備した個室が60室程度装備され、1日8時間労働が基本である。また、会議室、ジム、プレイルーム、図書室などが完備され、良好な職場環境と生活環境が整備されている。デッキには可動式のWalk In Bridgeが装備され、船上から水平に歩いて風車タワーのドアから風車内部に入ることができ、従来の様に小型船から風車下部に設置された梯子を登って風車に乗り移る必要がないので、落下などの事故率低減にも寄与している。今後、欧州や米国では、沖合の洋上風力発電ファームが増えるため、SOVが普及すると思われる。尚、現場が領海外に位置するため乗船要員はパスポートを携帯する義務がある。


5.日本における洋上風力発電の課題と長崎県の取り組み
5.1 日本における洋上風力発電の意義と課題
日本でも洋上風力発電の導入目標を英国並みの規模に設定できれば、例えば合計出力40GWの洋上風力発電設備から電力需要の約10%に相当する電力供給、エネルギー自給率の向上、年間1兆円規模の新たな海洋産業の創出、地方経済の活性化と雇用創出などが期待できる。
日本で洋上風力発電事業を普及させ発電コストを低減させるためには、大規模な導入目標、長期間に亘る導入政策、投資環境の整備が必要である。また、系統接続容量の拡大、洋上風力の沖合利用と漁業との共生、領海外進出に関する新たな法整備などの課題があるため、それらを解決するための方策の検討と実施に取り組むことが重要である。
5.2 洋上風力発電の沖合進出と漁業との共生
日本では、2019年8月末時点で合計12GWを超える洋上風力発電案件が環境アセスメント手続きを実施中であるが、計画は離岸距離数km以内の沿岸海域に留まっている。一方、新エネルギー・産業技術総合開発機構(NEDO)が公表した日本の洋上風況マップNeoWins9)によれば、多くの沿岸海域の年間平均風速が7.5m/秒前後であるのに対し、沖合には年間平均風速9.5m/秒前後の高速海域や8.5m/秒前後の中速海域が存在している。このため、日本でも、洋上風力発電の沖合進出を図ることが重要であり、そのためには漁業との共生が課題になる。
日本では2018年12月に70年ぶりに漁業法が改正され、2020年12月から施行されることになった10)。狙いは、水産資源の適切な管理と水産業の成長産業化の両立で、この改正により地域漁業者以外の民間企業も漁業権を得ることが可能になると期待されており、今後、洋上風力発電ファームを利用した水産資源保護区の設定や洋上風力発電と養殖との共生事業などが実現する可能性がある。
特に沖合養殖では、最新技術による大規模化、遠隔通信技術の導入、安定電源の確保等などが必要になるため、洋上風力発電と沖合養殖との共生事業に関する研究や実証が重要になると考えられる。また、世界では人口増加に伴う食料需要増大への対応策として養殖が拡大しているが、日本では人口減少等に伴い需要が減少しているため、養殖魚等の輸出産業化による水産業の再生復活も重要な課題である。
5.3 長崎県における洋上風力発電と漁業との共生に関する取り組み
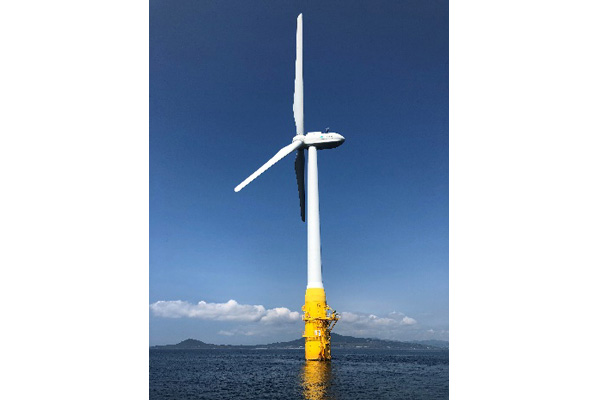
長崎県五島列島で最大の島である福江島では、沖合約5㎞の海域で出力2MWの浮体式洋上風車が2016年3月から商業運転を行っており、地元漁業者と洋上風力発電が共生している点でも大きな意味がある。


長崎大学海洋未来イノベーション機構では、バイオロギング技術を利用した洋上風車周辺海域における魚類の個体生態行動に関する調査研究、先端技術を導入した新たな養殖の開発、洋上風力発電と沖合養殖との共生に関する研究(三井物産環境基金助成研究)、潮流発電の海域実証開発などに取組んでいる。
我が国では、エネルギー政策の一環として、再生可能エネルギーの主力電源化、発送電分離、系統接続容量の増強検討等が推進されているが、地方でも、新たな養殖技術の開発や洋上風力発電との共生事例の創出などに向けた努力を続け、新たな海洋産業としての洋上風力発電の普及拡大と水産業の再生復活を目指すことが重要である。
参考文献
5) EWEA:”The European offshore wind industry ? key trends and statistics 2015(表紙)”
https://www.ewea.org/fileadmin/files/library/publications/statistics/EWEA-European-Offshore-Statistics-2015.pdf
6) Equinor : Hywind Scotland
https://www.equinor.com/en/news/hywindscotland.html
7) CTV (Crew Transfer Vessel) : Forbes
https://www.forbes.com/sites/jaredanderson/2017/03/01/you-cant-have-offshore-wind-power-without-petroleum/#6a31c2b44f2f
8) SOV (Service Operation Vessel):Esvagat homepage
https://www.esvagt.com/fleet/wind-service-operations-vessels/esvagt-faraday/
9) NEDO:NeoWinds
http://app10.infoc.nedo.go.jp/Nedo_Webgis/top.html
10) 水産庁:水産政策の改革について(漁業法等改正関係)
https://www.jfa.maff.go.jp/j/kikaku/kaikaku/attach/pdf/suisankaikaku-18.pdf
11) 崎山沖2MW浮体式洋上風力発電所について
https://haenkaze.com/about/about-facility/
12) 筆者撮影: 五島沖に浮かぶ崎山風力発電所の浮体式風車「はえんがぜ」の外観写真
13) 五島市提供: 「はえんかぜ」下部の浮体と周辺に集まる魚類の海中写真
【著者紹介】
織田 洋一(おだ よういち)
1952年9月10日生まれ
国立大学法人長崎大学 海洋未来イノベーション機構 コーディネーター
■略歴
1977年 4月 三井物産株式会社入社
金属資源本部(新規事業開発、リサイクル事業推進などを担当)
2008年 4月~ 三井物産戦略研究所
(洋上風力発電、海流・潮流発電、海底資源開発などを担当)
2017年10月~ 国立大学法人長崎大学 海洋未来イノベーション機構
■社会における活動
2013年10月~2015年3月 名古屋大学客員教授
2015年11月~2016年3月 内閣官房 総合海洋政策本部 参与会議
新海洋産業振興・創出PT
洋上風力発電・海洋再生可能エネルギーWG
2016年 1月~2017年3月 文部科学省科 科学技術・学術審議会
海洋開発分科会 次世代深海探査システム委員会
2016年 3月~2018年3月 国立研究開発法人 海洋研究開発機構
イノベーション促進プログラム選考メンバー
2019年10月~2020年3月 内閣府 総合海洋政策本部 参与会議
科学技術・イノベーション スタディグループ
2019年12月~2020年3月 戦略的イノベーション創造プログラム(SIP)第2期
革新的深海資源調査技術 ピアレビュー会議 など
長崎県・長崎大学の海洋産業への取組(2)

海洋未来イノベーション機構
森田 孝明
4.洋上風力発電の商用化と促進区域
令和元年4月のいわゆる再エネ海域利用法の成立とも相まって、全国で洋上風力発電の商用化計画が急速に拡大している(図-3)。しかし、法律に海域利用のしくみが定められただけでは、一朝一夕に海洋開発としての洋上風力発電が進んでいくということには残念ながらならない。法に基づき洋上風力の商用化のために30年の長期海域占用が可能となる「促進区域」に指定されるためには、海域の利用に係る地域との合意や、漁業関係者との協調等が大変重要である。長崎においては、実証フィールド指定にさかのぼる地元関係者の継続的な努力が実り、漁業関係者を含む関係者の理解を得て、浮体式洋上風力の商用化を目指した「五島市沖」が、令和元年12月27日、全国第一号の「促進区域」に指定された。
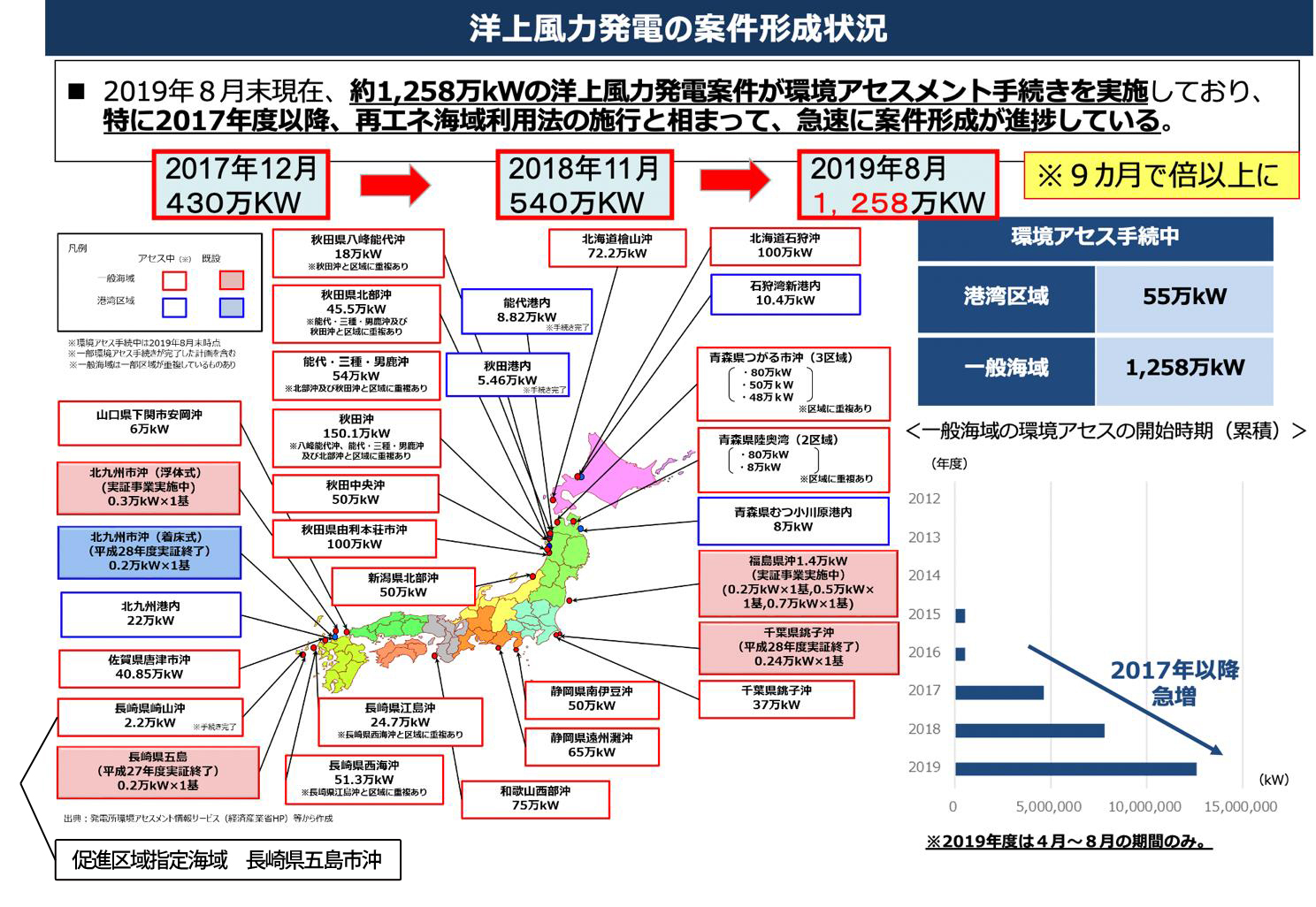
出典:発電所環境アセスメント情報サービス(経済産業省HP等から作成)
5.洋上風力と共生する漁業の振興と地域活性化
また、長崎には、洋上風力の促進区域に向けて、国から「すでに一定の準備段階に進んでいる区域」と整理された「西海市江島沖」というエリアがある。潮流発電の実証フィールドでもある同海域周辺は、洋上の風のポテンシャルも有望であることが確認されている。
長崎大学海洋未来イノベーション機構は、西海市からの要請を受け、同市とともに、洋上風力と共生する持続可能な地域開発に寄与することを目指して、令和2年3月30日、協力・連携に関する協定を締結した。今後、同市と機構との共同研究を開始することとしている。
長崎大学は、これまでも、西海市の地域協議会における勉強会や漁業者も交えた勉強会を支援してきた。また、令和元年9月には、日本水産工学会の初の国際会議ICFE2019において、海洋未来イノベーション機構 海洋未来科学推進室長の松下吉樹教授が実行委員長を務め、長崎大学を会場とした4日間の国際学会において中心的役割を果たした。特に4日間の内の1日全てを「海洋再生可能エネルギーと水産工学」をテーマとした公開シンポジウムにあて、洋上風力と漁業との共生というテーマにおいて、長崎大学と国内外の機関とのつながりを強化した。今後の研究に活かしていく。
6.日本財団 長崎海洋アカデミー
日本における洋上風力の商用化計画の拡大を踏まえ、日本財団は、洋上風力発電産業における人材の育成が急務であるとの認識を強く持つに至っている。また、平成30年5月に閣議決定された第3期海洋基本計画においては、海洋開発人材育成を加速させるため「「日本財団オーシャンイノベーションコンソーシアム」への関係者の参加及び取組強化を促進する」ことが決定された。これを受けて、令和元年3月20日、日本財団は、その具体的取組として、長崎大学のキャンパス内に、「日本財団オーシャンイノベーションコンソ―シアム 長崎海洋開発人材育成・フィールドセンター(愛称:「長崎海洋アカデミー(Nagasaki Ocean Academy :NOA エヌ・オー・エー)」)設置の支援を決定した。社会人育成のための機関として、NPO法人長崎海洋産業クラスター形成推進協議会が運営する施設であるが、長崎大学のオープンラボとして、同協議会が入居する形で、すでに常駐人材が配置され、令和2年10月の開講に向けて活動が始まっている。
出典:長崎海洋産業クラスター形成推進協議会
7.「フィールドセンター」と「長崎オープンイノベーション拠点」
洋上風力発電分野の社会人育成とともに、長崎海洋アカデミーの持つ「フィールドセンター(実海域を利用した研究開発の促進拠点)」の機能の充実も重要である。今後、日本財団支援による「長崎海洋アカデミー」と、県による国指定の「実証フィールド」の運営、「長崎大学海洋未来イノベーション機構が掲げる技術クラスター構想」が融合することにより、長崎大学を拠点とした、県内外の自治体や研究機関と連携した研究ネットワークを形成することが可能ではないかと考えている。次世代センサー協議会との連携にも大いに期待している。
長崎大学においては、第4期中期計画に向けた助走として、令和2年度より、研究開発や産学官連携を一元的に所管する「長崎大学研究開発推進機構」と「長崎県産業労働部」が連携した「長崎オープンイノベ―ション拠点」を長崎大学内に設置することとしている。ここでは、県が新たな基幹産業として育成に取り組んでいる3分野(「海洋」、「ロボット・IoT」、「航空機」)に加え、長崎大学が培ってきた「ライフサイエンス・医工連携」を加えた4分野を中心に、産学官連携による研究開発や事業化プロジェクトを生み出す拠点とするとともに、学内の「FFG(福岡フィナンシャルグループ)アントレプレナーシップセンター」とも連携し、金融機関を加えた産学官金連携により、企業の新事業創出はもとより、学生や大学研究者発のスタートアップやベンチャー創出も実現する拠点として発展させていく方針である。今後、さらに、国内外の大学・研究機関とのネットワークを積極的に構築しながら、長崎のフィールドを生かした拠点を形成していきたい。
8.おわりに
このたびは、長崎の海洋に関する取組を紹介する機会をいただき感謝申し上げる。西の端の長崎において、海洋再生可能エネルギーのポテンシャルや水産・環境の技術を基礎に、我が国の海洋技術の発展に貢献すべく日々試行錯誤している。
センサイトでつながる研究者の皆様や次世代センサー協議会の皆様はじめ国内外の有意な研究者による長崎をフィールドとした研究や社会実装プロジェクト等、長崎とのネットワークをお考えいただければありがたい。
※本論文内の意見・見解等は、執筆者個人に属し、長崎県及び長崎大学の公式見解を示すものではないことを申し添える。
【著者紹介】
森田 孝明(もりた たかあき)
長崎大学海洋未来イノベーション機構 機構長特別補佐
兼 長崎県産業労働部 参事監(2020年3月まで)
長崎県産業労働部 参事監(大学連携推進担当)(2020年4月~)
■略歴
1985年3月長崎大学経済学部卒業後、三井銀行で融資業務に従事ののち、出身地である長崎にUターンし長崎県庁に入庁。
2013年、産業労働部産業政策課企画監(課長級)の折、「長崎県海洋エネルギー産業拠点形成構想」策定に従事。
2014年から海洋産業創造室長として、内閣官房海洋政策本部からの実証フィールド選定獲得に奔走するとともに、長崎県、長崎大学、長崎総合科学大学及び長崎海洋産業クラスター形成推進協議会の4者による海洋エネルギー関連分野における連携協力に関する協定を締結。海洋・環境産業創造課長を経て、
2017年4月、産業労働部部付の課長となり、4者連携協定に基づき設立された長崎大学海洋未来イノベーション機構の機構長特別補佐を併任。日本財団の長崎海洋開発人材育成フィールドセンター事業の誘致を主導。
2019年4月からは、県産業労働部参事監(次長級)として同業務に従事。長崎県西海市と長崎大学海洋未来イノベーション機構との連携協定締結や共同研究をプロデュースした。長崎県における産学官による海洋エネルギー産業づくりに一貫して従事するとともに、九州地域戦略会議における海洋エネルギー産業化実務者会議の副座長、内閣府総合海洋政策推進事務局による「海洋状況表示システム(海知る)の活用推進のための検討会」委員のほか、 日本船舶海洋工学会海洋教育推進委員会委員及び海洋教育フォーラム長崎地区実行委員長として、若者への海洋の普及啓発にも取り組んでいる。
2020年4月からは、県産業労働部に新設された参事監(大学連携推進担当)として、引き続き、産学官連携による産業づくりに従事している。
水中における位置の計測(2)

尾崎 俊二
3.SSBL方式音響測位
SSBLでは、一つの受信器で目標からの応答信号を受信し、伝搬時間を計測して距離を求めるとともに、到来方位や俯仰角を求める。LBLやSBLに比べて受波器配列の広がりが非常に小さいため、信号の到来方向を高精度で求めるには、受波器配列及び処理に工夫が必要である。
受波器配列の形状に焦点を当てて、3つの異なる配列のSSBLシステムを紹介する。紹介するシステムの受波器配列の外観を図1に示す。

左から (a) 球面配列1)、(b) 4素子3次元配列2)、(c) 3素子平面配列3)
(a) 球面配列
受波素子を球面上に配列し、視野範囲に複数のビームを形成して、信号の到来俯仰角とそれに直交する方向の角度を高精度で求めている。受波器配列を球面上に置くことにより、広い角度範囲(この例では直下±100度)で均一な測位性能を持たせるようにし、かつ受波面積を広くとることで高いSNRを確保して、深海・遠距離までの測位を実現している。受波面を凸面にし、シャープなビームを形成することで、受波器相互の干渉は抑えられ、またマルチパスの影響も抑えられている。姿勢センサと連接して運用し、受波器配列の動揺の影響を補償している。
(b) 4素子3次元配列
4つの受波器を四面体の頂点に配置し、相関処理により各受波器間の到来時間差を求め、それらを連立させて、応答信号の到来方位と俯仰角を算出している。受波器配置が3次元的な広がりを持っていることにより、直下±100度の視野範囲全体でほぼ一様な測位精度を得ている。また、受波器間隔を広くとる(外径約300mm)ことで、受波器相互の干渉を抑え、高精度測角を実現している。
受波器と同じユニット内に慣性航法装置を組み入れることで、受波器配列の動揺を補償している。
(a)及び(b)とも、広帯域の符号化パルスを用いることにより、時間分解能とSNR改善とを図っており、数kmの測位距離を得ている。また、符号化により、多くのチャネルの同時運用も可能にしている。
(c) 3素子平面配列
最もシンプルな受波器配列である。3つの円板型受波器を下方の水平面にL字型に配置し、L字の各辺方向の方向余弦を相関処理により求めて、方位及び俯角を算出している。受波器を平面上に配置することで、受波器間の相互干渉を抑え、到来信号に対する条件を均一化している。上方向に対しては感度を抑圧し、直下±90度の半空間を視野範囲としている。水平面上の配列であるため、小さい俯角範囲で俯仰角精度が低下するが、トランスポンダ側に水圧センサを取付け、その情報を応答信号として受波器に送信して、深度情報として用いることで補っている。港湾等の浅海域で、海面・海底の多重反射波が大きな影響を与える条件の下では、水圧センサでの補完は有効である。
容器内には姿勢センサが組み込まれ、受波器配列の動揺を補償している。
4.海洋生物の追尾への応用
2節で触れたパッシブ音響測位の応用例として、クジラのトラッキングに応用した例を紹介する。浦等4)はマッコウクジラの発するクリック音を2組の受波器アレイで受信してそれぞれで到来方向を求め、方位線の交点によりクジラの位置を測定追尾する実験を行っている。観測システムの概念を図2に示す。
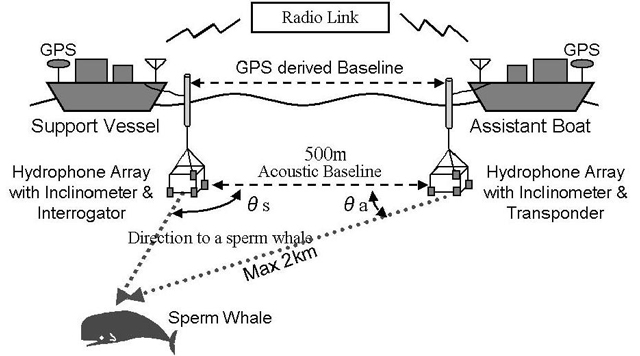
2隻の船から4素子受波器アレイ(1辺30cmの立方体の頂点に受波器を配置)をそれぞれ吊下し、クジラのクリック音(中心周波数約15kHz)を受信して、SSBL方式により到来方向を求める。2つの受波器アレイ間の位置関係は、GPSでの測位とともに、質問・応答用に取り付けた送受波器と合わせてアクティブのSSBL機能を構成し、音響的にも求められるようにしている。2つの受波器アレイ間距離を500m、クジラとの距離を2000mとすると、約20mの位置精度で測位ができるとのことである。
同様の技術は河イルカの生態調査などにも用いられ、国際的な共同研究が行われている。
5.おわりに
水中で対象目標の位置計測を行う手段として音響測位の概要を紹介し、受波器配列が一体であり、トランスポンダキャリブレーション等の面倒な作業が不要な方式であるSSBLに焦点を絞って説明した。例として、異なった形状の受波器配列を持つ3つのシステムを紹介したが、目的や運用環境に適したシステムを構築する必要があろう。また、対象が発する音を利用して測位を行うパッシブ音響測位の例として、クジラのクリック音による測位の例を紹介した。
海洋のエネルギー開発、資源開発や様々な調査等で、音響測位技術は音響通信技術などとも融合して、その活躍の場が広がっていくものと思われる。
参考文献
1) Kongsberg MARITIME社 USBL測位装置 HiPAP,
http://www.nipponkaiyo.co.jp/product/id:5a606e33-a428-4dfd-b6d0-7610a0108c5f/maker:9805bf55-c4ef-11e7-b11b-9ca3ba0232db
2) Gaps M7 High performance USBL positioning system
https://www.ixblue.com/sites/default/files/2020-03/Gaps-M7.pdf
3) SSBL-100CHD音響測位装置
http://www.sgktec.co.jp/pdf/location%20system/SSBL-100CHD.pdf
4) 浦環他:”2組のハイドロフォンアレイを用いたマッコウクジラの追跡観測実験” 生産研究,56(2), 157-160(2004)
【著者紹介】
尾崎 俊二(おざき しゅんじ)
株式会社SGKシステム技研
■略歴
1973年3月 京都大学工学部電気工学科卒業
1973年4月~2009年10月 沖電気工業株式会社
2009年10月~現在 株式会社SGKシステム技研
■専門分野
海洋音響、音響信号処理
■所属学会
海洋音響学会、日本音響学会、米国音響学会
TechShare、Unitree社製4足歩行ロボットA1国内販売開始

TechShare(株)は国内正規代理店としてUnitree社の4足歩行ロボットUnitree A1の国内販売を2020年5月18日付で開始すると発表した。
TechShareが販売を開始した4足歩行ロボットA1は、Unitree社が開発した電動の4足歩行ロボット。米国のボストンダイナミックス社のSpotやUnitree社のAlienGoなどの4足歩行ロボットと比較すると小型だが、低価格で高い運動性能実現し、SLAMや機械学習など幅広いアプリケーションでも使えるマルチ機能の4足歩行ロボットであるという。
ロボット自体の大きさは、中型犬程度の大きさで、本体重量も12kg程度。小型ながらその運動性能は非常に高く、可搭載重量5kg、平地の最大速度 11.8km/hの走行性能、バク転などもできる高い運動性能をUnitree社の自社開発の高性能モーターを搭載することで実現しているとのこと。
また、Unitree A1の本体にはジャイロセンサ、各足先には力覚センサが搭載されており、力覚情報とジャイロの姿勢情報の高速なフィードバック制御が実装されている。凸凹のある野原や荒れ地、段差のある道路、階段などの外乱の大きい環境でも、スムーズに歩行できる強力な制御性能は実現している。
さらにUnitree A1は、3Dカメラが搭載されているので、衝突回避やVisual SLAM、人物特定などアプリケーションとしても利用することができる。
<マシンサイズ・重量>
◇本体重量(バッテリーを含む):12kg±1kg
◇サイズ
立脚時(歩行時) : 長さ 50cm x 幅 30cm x 高さ 40cm
折畳時(ホールディングモード): 長さ 45cm x 幅 30cm x 高さ 15cm
<歩行性能>
◇ 可搬重量:5.0kg
◇ 平地走行速度(最大):3.3m/s(11.8km/h)
◇ 最大登坂角度:20度
◇ バッテリー寿命
連続歩行時の持続時間:1.0~1.5h
立脚状態の持続時間 :2.5h
ニュースリリースサイト・https://www.physical-computing.jp/news-detail/100
NVIDIA Clara の機能を強化し、COVID-19 への取り組みを支援

NVIDIA Clara™ ヘルスケア プラットフォームが大きく普及しているなか、NVIDIA は本日、性能のブレイクスルー、主要なパートナーシップ、ならびに医療コミュニティが COVID-19 に対してよりよい追跡、テストおよび処置を行えるようにするための新たな機能を発表を行った。(5月14日)
AI とアクセラレーテッド コンピューティングを組み合わせたプラットフォームにより、ヘルスケア研究者やテクノロジ ソリューション プロバイダーおよび病院は、以下のような特性を活かして、パンデミックにより速く、新たな方法で取り組むことができるようになるとしている。
●新記録を打ち立てた、ゲノム配列解析の速度
— COVID-19 の研究者に 90 日間無償ライセンスが提供されている、NVIDIA Clara Parabricks® のゲノムデータ解析ソフトウェアが、ヒトゲノム全体の DNA 配列を 20 分未満で分析する、新たなスピード記録を樹立した。
●疾病検出 AI モデル
—米国国立衛生研究所 (NIH) と共同開発し、本日より利用可能となった AI モデルにより、研究者は胸部の CT スキャンから COVID-19 の重症度を読み取れるようになり、感染をより正確に把握、測定および検出するための新しいツールを開発できるようになる。
●スマート ホスピタルのための NVIDIA Clara Guardian
— 同日発表された、NVIDIA Clara Guardian™ では、インテリジェントなビデオ解析と自動音声認識テクノロジが使われており、これらによって新時代のスマート ホスピタルでは、スタッフの感染リスクを抑制しながら、バイタルサインの監視ができるようになる。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000156.000012662.html
無料オンラインセミナー「Photonics West 2020から見える今年のレーザーマーケット・技術動向」
オンラインセミナー参加申し込み(無料)
https://us02web.zoom.us/webinar/register/WN_qePX8BM_SA6zhbldPbCqmQ
その年の光学業界のトレンドを決定するとも言われる,世界最大級の光学国際会議・展示会「Photonics West 2020」が,2月5日~7日,アメリカ・サンフランシスコで開催された。コロナの世界的流行が始まる直前であったことから,奇しくも本年における技術およびビジネスの動向を占う,唯一とも言える貴重な機会となった。
月刊OPTRONICS編集部では,今年も本展示会場で各国のメーカーや商社等への取材を敢行し,その動向を探った。また,国際会議の主要なセッションに参加した日本の研究者にその概要と注目技術について報告していただき,今年も 「Photonics West報告書 2020」として刊行する運びとなった。
これを記念し,無料オンラインセミナー「Photonics West 2020から見える今年のレーザーマーケット・技術動向」を開催する。オプトロニクス社からの展示会報告の他,フォトンブレインジャパン 家久信明氏を講師に招き,Photonics Westにおけるレーザー発振器や加工システムの市場や技術動向について最新情報を報告していただく。
参加は無料。また,WEBでの開催なので,インターネット環境があればどこからも聴講可能。
===================================
無料オンラインセミナー「Photonics West 2020から見える今年のレーザーマーケット・技術動向」
【開催概要】
日時:5月20日(水)13:00~15:00
参加料:無料
プログラム:
13:00~13:10 オリエンテーション
13:10~13:15 「ご挨拶」
三島滋弘(月刊OPTRONICS編集長)
13:15~13:25 「Prism Awards受賞製品とLiDAR関連製品の動向」
杉島孝弘(OPTRONICS ONLINE編集長)
13:25~14:25 「Photonics West2020から見える今年のレーザーマーケット・技術動向」
家久信明(フォトンブレインジャパン代表)
14:25~ Q&A
===================================
参加申し込み
https://us02web.zoom.us/webinar/register/WN_qePX8BM_SA6zhbldPbCqmQ
圧力を検知して着座状況を管理、 BLEビーコン搭載のスマートチェア

サンワサプライ(株)は、圧力を検知して着座状況を管理できる、BLEビーコン搭載の肘付きスマートチェア「SNC-NET16ABK-BLE」と、肘なしスマートチェア「SNC-NET16BK-BLE」を発売した。
〔概要〕
「SNC-NET16ABK-BLE」「SNC-NET16BK-BLE」は、圧力を検知して着座状況を管理できる、BLEビーコン搭載のスマートチェア。
チェアの座面内に圧力を感知できるセンサを内蔵しており、SSSクラウドサービスをご利用頂くことによってオフィスの着座状況などがひと目で分かるようになるという。
リアルタイムで着座状況をモニターできるので、勤怠管理に利用できる他、会議室など共有スペースの予約管理などにも活用できる。また、公共施設や店舗などで使用することにより、現在の混雑状況をWebサイトを通じてユーザーが把握できるようになるなど、様々な業種で利用できるとのこと。
チェアには背もたれと固さ調節が可能な座面ロッキング機能がついており、ゆったりもたれかかることができる。
背面は通気性抜群なメッシュ素材。さらに、簡易ランバーサポート機能付きなので、腰の疲れを低減するという。
ガス圧高さ調節リフトにより、レバー一本で座面の高さ調節が可能。
ニュースリリースサイト(sanwasupply):https://www.sanwa.co.jp/news/202005/net16-abkble/index.html
可搬重量約120kgを実現した メガローバー F120 発売
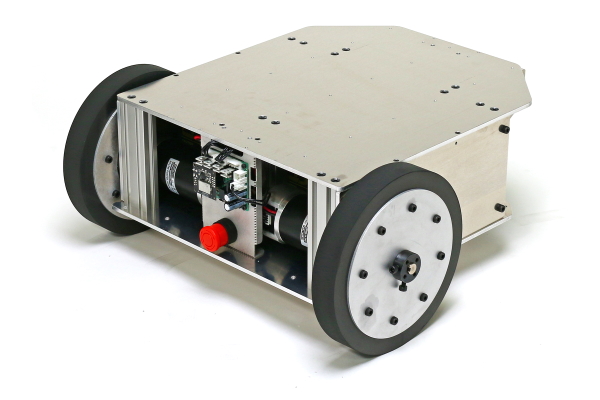
ヴィストン(株)は、可搬重量約120kgを実現した研究 開発用台車ロボットの超大型モデル「メガローバーF120」を発売すると発表した。
「メガローバーF120」は、発売中の二輪駆動台車ロボットである「メガローバーVer2.1」をベースに、可搬重量を約120kgと大幅に強化した大型台車ロボット。 十分な可搬重量と、二輪制御による安定性・取り扱いの容易性などを生かし、様々な用途での研究開発に活用できるとのこと。
本製品においては、実績あるメガローバーシリーズの基本構成を踏襲しつつ、本体構造やモーター出力などを大きく強化。 ArduinoIDE対応、ROS対応といった特徴はメガローバーVer2.1からそのまま引き継いでいるため、用途の種別を選ばない多様な運用が可能となっている。 また、メガローバーをベースとして開発を進めたプロジェクトにおいて、台車ロボットの可搬重量を大幅に強化したいといったリプレース目的にも好適であるという。
メガローバーF120は、既発売の四輪メカナムホイール搭載ロボット「メカナムローバーG120」と同様に、可搬重量約120kgの大型機体であることを最大の特徴としつつ、容易な開発や自由な機能拡張を実現する柔軟性も備えている。既存の弊社製 研究開発用台車ロボットのシリーズと合わせ、自動運搬による荷物搬送の研究開発など、多様化・具体化するAGVニーズに応えるソリューションとして展開していく。
なお、同社よりリリース済みの「ROS対応3Dシミュレーターモデル」の本製品への対応についても、今後予定されているとしている。
プレスリリース(Vstone):https://www.vstone.co.jp/news/pdf/press200513-02.pdf
東郷神社・原宿東郷記念館にて、obnizBLEを用いた換気状況の見える化を実現
(株)CambrianRoboticsは、5月6日から東郷神社・原宿東郷記念館にて、obnizを用いた換気状況の可視化ソリューションのテスト稼働を開始したと発表した。
東郷神社・原宿東郷記念館は、5月6日より新スタイルの結婚式「東郷LIVE WEDDING~オンラインで祝言を~」の発売を開始した。同商品内にある「3密防止」における換気の徹底を実現するために、obnizBLEを導入したとのこと。
◇東郷神社・原宿東郷記念館の換気状況の可視化ソリューション導入について
CO2センサを神殿内・ロビー・披露宴会場へ設置。obnizBLEを用いてリアルタイムにCO2濃度の計測値をクラウドへと集約する。
センサで取得したCO2濃度の数値は、同会場側だけが知るのではなく、会場内のタブレットやサイネージへの表示、二次元バーコードを利用し誰でもスマートフォンなどで換気状況を閲覧できる環境を整え、新郎新婦や来場者も「安心・安全」を実感できる仕組みを提供しているという。
◇obniz換気状況可視化ソリューションについて
■価格
測定箇所 100箇所未満の場合
月額 9,800円/月 (年一括支払も可)
初期費用 150,000円
50,000円/測定箇所(センサ費用を含む)
※別途Wi-Fi / インターネット環境 / 管理・閲覧用PCやスマートフォンが必要。
※現地設置費用などは含まない。
※初期画面やセンサとのキッティング費用を含む。
■機能
高性能CO2センサで取得したデータを、obnizBLEゲートウェイ経由で可視化する。
スマートフォン・PCによる施設内換気状態の一括/個別数値化・グラフ表示
過去の換気履歴の取得
換気不良検知時のメール・チャットサービス通知機能 など
ニュースリリースサイト(obniz):https://blog.obniz.io/blog/ventilation-solution-case-togo-kinenkan/
植物ホルモン (エチレン) を常時モニタリングできる小型センサを開発
国立研究開発法人 物質・材料研究機構 (NIMS) および国立研究開発法人 産業技術総合研究所 (産総研)は、植物ホルモンであるエチレンを常時モニタリングできる小型センサを開発したと発表した。
概要
1. エチレンは野菜や果物の熟成を促進させるが、過剰に存在すると腐敗を進行させてしまう。小型センサによってエチレンの常時モニタリングを行えば、野菜や果物の最適な輸送・保存管理が可能となり、食べ頃の調整や、フードロスの削減などにつながると期待されるとのこと。
2. エチレンは野菜や果物から放出されるガス分子で、野菜や果物の熟成を促進させる植物ホルモン。保存庫内にエチレンを添加することで、人為的に野菜や果物の熟成を促すこともでき、エチレンの濃度を常時モニタリングして熟成の進行を予測すれば、最適な輸送・保存管理につながる。そのため、農業・食品業界では安価で小型なエチレンセンサが切望されている。しかし現在市販されているエチレン検出用の小型センサは、その多くが高温状態 (200〜300℃) で駆動させる必要があり、センサ材料表面が高い活性を持つため他の還元性ガス分子 (アルコール、メタンなど) とも反応してしまい、エチレンの選択的な検出が難しいことが課題だったという。
3. 研究では、エチレンを選択的にアセトアルデヒドに変換する高活性触媒と、アセトアルデヒドと反応して酸性ガスを発生する試薬、そして酸性ガスを高感度に検出する単層カーボンナノチューブ (SWCNT) で修飾した電極の三要素を組み合わせることで、エチレンを選択的かつ高感度に検出できる小型センサを開発した。高活性触媒は、エチレンを含む空気を通過させるだけで、エチレンをアセトアルデヒドに変換でき、繰り返し利用可能。しかも室温付近 (40℃) で駆動するため、高温に維持する必要がなく低消費電力で動作可能という点でも小型センサに適している。アセトアルデヒドと試薬の反応で発生した酸性ガスは半導体SWCNTに対して強い電子引き抜き剤として働くため、SWCNTの電気抵抗値を変化させる。この仕組みにより、僅か0.1ppmのエチレンを高感度かつ高選択的に電気抵抗の変化としてモニタリングすることに成功した。例えば、バナナとキウイフルーツの熟成 (追熟) に用いられるエチレンの濃度は、それぞれ約500ppmと約10ppmなので、このセンサで十分に対応できるとのこと。
4. このエチレンセンサは小型かつ省電力であり、情報 (ビックデータ) を集積・ネットワーク化するためのセンサデバイスを低コストで設置することが可能で、農業・食品業界においてSociety 5.0の実現に向けた取り組みを推進することができると考えている。さらに、別の高活性触媒を設計し、エチレン以外のガス分子に対応する小型センサの開発も進めているという。
5. この研究は、NIMS国際ナノアーキテクトニクス研究拠点の石原伸輔主幹研究員と、産総研 触媒化学融合研究センターの洪達超研究員、及び産総研 ナノ材料研究部門、インド工科大学マンディー校の研究者らによって行われた。研究成果は、2020年5月11日 (米国東部時間) に米国化学会の学術誌「ACS Sensors」のオンライン版で公開されるとしている。
プレスリリースサイト(NIMS):https://www.nims.go.jp/news/press/2020/05/202005120.html