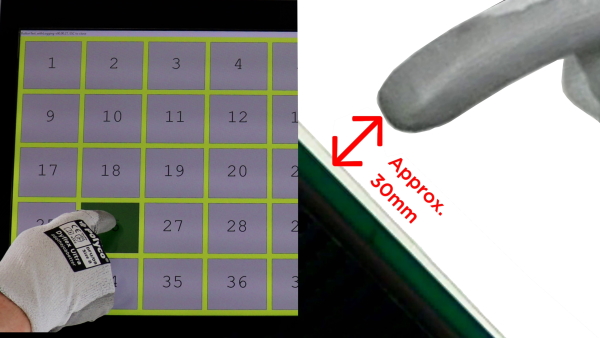
英ザイトロニック・ディスプレイ(Zytronic Displays Ltd.,)は、ガラスの表面から最大30ミリ離れた場所からのユーザー操作を検出できる非接触センサをオプション製品として発表した。
この最新ソリューションは、同社のフルカスタマイズが可能なZyBrid®タッチセンサ技術に基づいており、英国本社のR&D部門ならびに製造施設でその開発が行われた。このソリューションはセルフサービスのキオスクで使用されるタッチパネルの表面に触れることに、不安を抱く利用客を安心させる取り組みを支援するために、開発が行われたとのこと。
この非接触ZyBrid®タッチセンサは、ザイトロニックのZXY500™投影型静電容量タイプ(PCAP)コントローラと連携して動作する。そのコントローラには、独自のファームウェアが搭載されて、感度レベルを通常よりもはるかに高く設定する事が可能。特別に設計されたタッチセンサと一緒に使用することで、非常に深いタッチフィールドを生成できる。さらに、このマルチタッチセンサは、ユーザーが厚い手袋をしていても、基本的なジェスチャー(ズーム、ピンチ、スワイプなど)を認識できる。もちろん、タッチスクリーンの表面に直接ユーザーが触れる標準のタッチモードで動作するように設定もできるという。
他の非接触タイプのタッチスクリーンは、そのほとんどが物理的なタッチなしでインターラクションを検出できるようにするために、画面の前端の周りに取り付けられた赤外線またはカメラベースのタッチ検出ハードウェアにより、その検出をしている。そのような構造は、必然的にスタイリッシュではない見栄えの悪い突出したベゼルを作り出すため、結果として病原菌を隠し、スクリーンを効果的に掃除することを困難にする可能性がある。
また、袖、雨滴や落ち葉などが、赤外線光線を遮断したり、カメラの視野に入ったりする余計な物となり、それに反応したりする為、「誤った」または偶発的なタッチと言った様な誤検出を招く恐れがある。さらに、強い直射日光と表面に蓄積するほこりと破片は、パフォーマンスを低下させたり、動作を妨げたりすることもある。投影型静電容量(PCAP)タッチテクノロジーは、指(手袋を含めた)または導電性スタイラスにのみ反応するため、このようなパフォーマンスの問題が発生する可能性は、はるかに低くなるという。
ザイトロニックは実用的な見地から、グラフィカルユーザーインターフェイス(GUI)の開発者にソフトウェアを適合させ、最適なユーザーエクスペリエンスを保証するようアドバイスする。
これには、タッチするアイコンのサイズを増やしたり、アクティブな各ボタン領域の周囲に「ガードバンド」を広げたりするなどのヒントを含む。どちらも、隣接するコントロールを操作する際の偶発的なタッチの誤検出のリスクを軽減するのに役立つとのこと。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000005.000040145.html