[3] Fujisaku,T.et al.,Nanometre-Scale Visualization of Chemical Parameter Changes by T1-Weighted ODMR Imaging Using a Fluorescent Nanodiamond. Chemosensors,8, 68(2020).
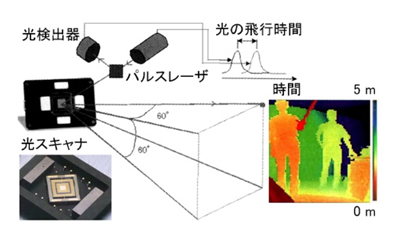
この2軸光スキャナは、3次元的な距離画像センサ(レンジイメージャ)として用いられている。図9にその原理を示すが、光は1nsで30cm進むため、パルスレーザの光が対象で反射されて戻るまでの飛行時間から、対象までの距離を知ることができる。レーザ光をスキャンし反射してきた光を検出するのを電磁駆動2軸光スキャナを用いて行うことにより、距離画像を得ることができる10)。図9中に示す画像の色が距離に対応している。このシステムは東京の山手線の駅に設置されているプラットフォームドアに用いられており、飛び乗る人などを検知し事故を防ぐのに役立っている。なおこのレンジイメージャは、これからの自動車の自動運転に必要なLIDAR(Laser Imaging Detection and Ranging)としても開発されている。このシステムの場合は、光スキャナを通して戻ってきた光を検出するため、背景光の影響を受けにくい。
11) T.Naono,T.Fujii,M.Esashi and S.Tanaka,Large scan angle piezoelectric MEMS optical scanner actuated by Nb doped PZT thin film,J.Micromech.Microeng.,24,1(2014)015010(12)
12) H.W.Knoebel,The electric vacuum gyro,Control Engng,11,2(1964)70-73
13) K.Fukatsu,T.Murakoshi,K.Minami and M.Esashi,Measurements of electrostatic force and capacitance for electro-statically levitating inertia measurement system,Technical Digest of the 15th Sensor Symposium(1997)39-42
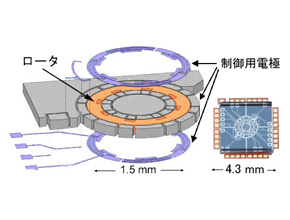
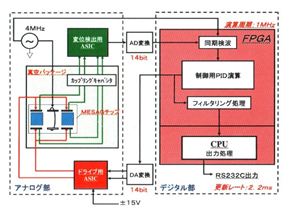
14) T.Murakoshi,Y.Endo,K.Fukatsu,K.Sigeru,S.Nakamura and M.Esashi,Electrostatically levitated ring-shaped rotational-gyro/accelerometer,Jpn.J.Appli.Phys.,42,Part1 No.4B(2003)2468-2472
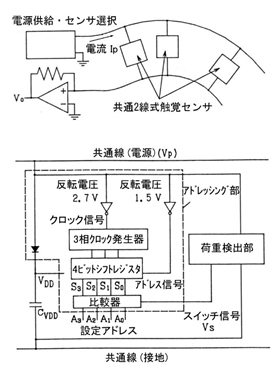
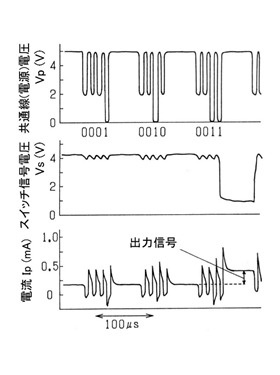
15) S.Kobayashi,T.Mitsui,S.Shoji and M.Esashi,Two-lead tactile sensor array using piezoresistive effect of MOS transistor,Technical Digest of the 9th Sensor Symposium(1990)137-140
16) 江刺正喜,「半導体集積回路設計の基礎」(1986) 培風館
17) M.Makihata,S.Tanaka,M.Muroyama,S.Matsuzaki,H.Yamada,T.Nakayama,U.Yamaguchi,K.Mima,Y.Nonomura,M.Fujiyoshi and M.Esashi : Integration and packaging technology of MEMS-on-CMOS capacitive tactile sensor for robot application using thick BCB isolation layer and backside-grooved electrical connection,Sensors and Actuators A,188(2012)103-110
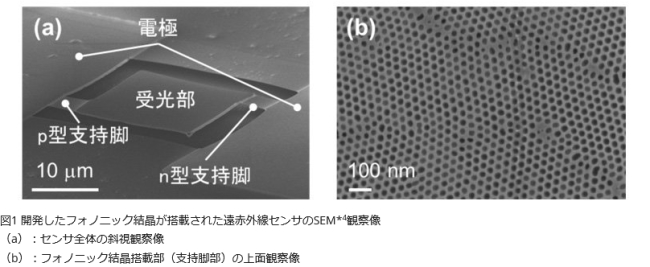
パナソニック(株)は、一般的なシリコン(Si)の断熱性能を示す物性値限界(*2)を大きく上回ることが出来るフォノニック結晶構造(*3)をSiウェハ上に量産適用可能な作製方法で形成し、デバイス性能を飛躍的に向上させる技術を開発した。本技術を遠赤外線センサの受光部に適用することで、受光部からの熱の漏れを約1/10に抑制し、従来のSiベースの遠赤外線センサに比べて約10倍の感度向上が可能になることを世界で初めて実証した。
こうしたフォノニック結晶を遠赤外線センサに導入し、センサ感度が向上することを実証した世界初の研究成果として、光学、フォトニクス、画像工学分野の国際学会SPIE(The International Society for Optical Engineering)のトップ5カンファレンスの一つであるSPIE Defense + Commercial Sensing 2021にて招待講演で発表した。