Y. Miyaji and K. Tomiyama, “Virtual Emotion for Robots –What, Why, and How–,” Intl. Symp. on Affective Sci. and Engr. (ISASE-MAICS 2018), Proc. A1-2, Spokane, May 2018.
M. Zenkyo and K. Tomiyama, “Surprise Generator for Virtual KANSEI Based on Human Surprise Characteristics,” Proc. (CD), 14th Intl. Conf. on Human – Computer Interaction (HCI2011), Florida, July 2011.
K. Kamijo and K. Tomiyama, “Emotion Estimation Based on Facial Image, Voice Sound and Body Motion,” Intl. Assoc. of Societies of Design Research (IASDR2013), 01D-4 (Paper number 1678-1), Tokyo, August 2013.
Y. Miyaji and K. Tomiyama, “Construction of Virtual KANSEI by Petri-net with GA and Method of Constructing Personality,” Proc., 12th IEEE Workshop on Robot and Human Interactive Communication (RO-MAN2003), pp. 6B4(CD-ROM), 2003.
■著書・連載
理系科学英語 徹底トレーニング [ロボット工学],(監修),アルク
私の修行時代,「修行時代の出会いを生かす」,(分担),弘文堂
いざ国際舞台へ! 理工系英語論文と口頭発表の実際,(共著),コロナ社
国際舞台で“結果を出す” テクニカルイングリッシュの心得第1回〜12回,日本機械学会誌 2018年,Vol.121, No. 1190~1201連載
“Virtual Emotion for Robot – Towards Human Support Robot,” Uehiro-Carnegie-Oxford Conference: Ethics and the Future of Artificial Intelligence, 2018.
前野隆司、小林一三、山崎信寿, ヒト指腹部構造と触覚受容器位置の力学的関係, 日本機械学会論文集(C編)、63(607), pp. 881-888 (1997).
J. Scheibert, S. Leurent, A. Prevost, G. Debregeas, The role of fingerprints in the coding of tactile information probed with a biomimetic sensor, Science, 323, pp. 1503-1506(2009).
Y. Shao, V. Hayward, Y. Visell, Spatial patterns of whole-hand cutaneous vibration, Proceedings of the National Academy of Sciences, 113(15), pp. 4188-4193 (2016).
S. Bensmaïa, M. Hollins, Pacinian representations of fine surface texture, Perception & Psychophysics, 67(5), pp. 842-854 (2005).
L. R. Manfredi, H. P. Saal, K. J. Brown, M. C. Zielinski, J. F. Dammann, V. S. Polashock, S. J. Bensmaia, Natural scenes in tactile texture, Journal of Neurophysiology, 111(9), pp. 1792-1802 (2014).
Y. Tanaka, D. P. Nguyen, T. Fukuda, A. Sano, Wearable skin vibration sensor using a PVDF film, Proceedings of the 2015 IEEE World Haptics Conference, pp. 146-151 (2015).
Y. Tanaka, T. Yoshida, A. Sano, Practical utility of a wearable skin vibration sensor using a PVDF film, Proceedings of the 2017 IEEE World Haptics Conference, pp. 623-628 (2017).
Y. Tanaka, Y. Ueda, A. Sano, Effect of skin-transmitted vibration enhancement on vibrotactile perception. Experimental Brain Research, 233, pp. 1721–1731 (2015).
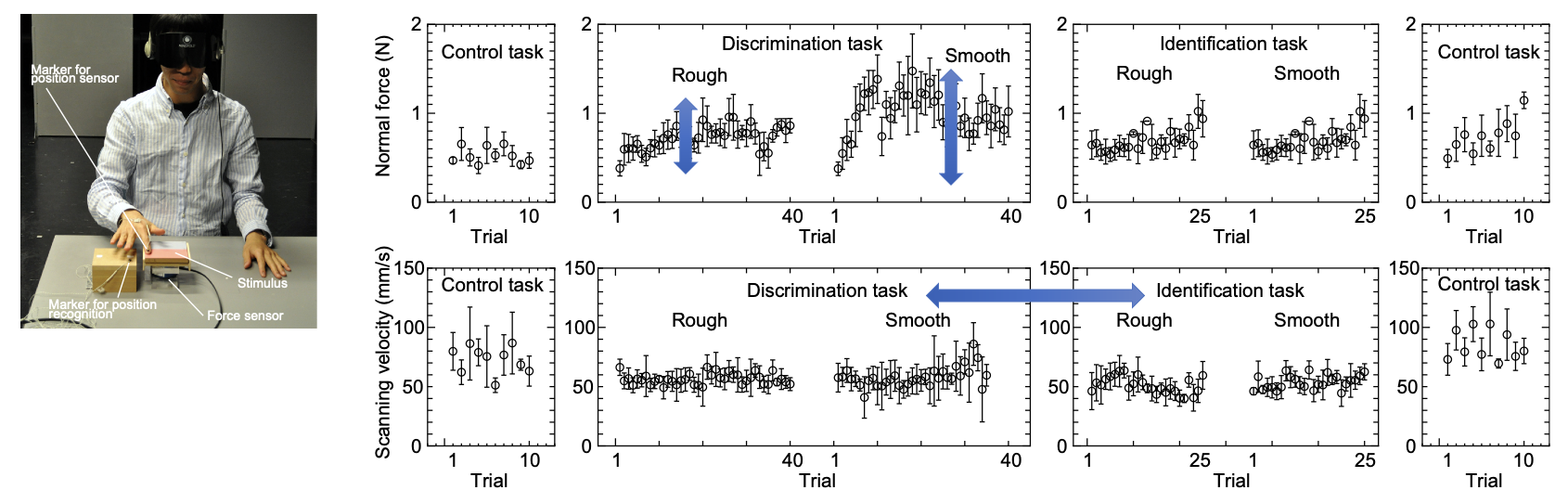
A. M. Smith, G. Gosselin, B. Houde, Deployment of fingertip forces in tactile exploration, Experimental Brain Research, 147(2), 209-218, (2002).
L. Kaim, K. Drewing, Exploratory strategies in haptic softness discrimination are tuned to achieve high levels of task performance, IEEE Transaction of Haptics, 4 (4), pp. 242-252 (2011).
Y. Tanaka, W. M. Bergmann Tiest, A. M. L. Kappers, A. Sano, Contact force and scanning velocity during active roughness perception, PLOS ONE, 9(3), e93363 (2014).
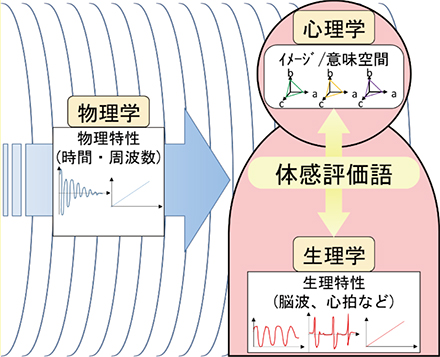
上述したように、聴取者がライブなどで経験した時と同様の感性や感動を生じ得る「場」の体感から身体感覚を伴った体感評価語が導出された。またこのことは同時に、音の伝搬において体感する空気流が、ライブなどで経験した時と同様の感性や感動の喚起に寄与したことを示唆している。一般に、皮膚は身体全体を覆って外界の刺激から身を守る役割を担っているだけではなく、身体全体に分布する外界を認識するセンサとして存在している11)ため、空気流が皮膚に触れることにより、ヒトの心理や生理状態に影響を及ぼしたと考えられる23)。ヒトが対象を認識する際は、視覚・聴覚・触覚・味覚・嗅覚などの五感が支配的であると言われているが、上記したヒトの心理や生理状態への影響は、ヒトの感性を主軸として考えた“体感”という視点から導出された感覚※であり、空気を媒体として生じることから『空気覚』と呼称する。そして、この空気覚を生じさせる空気流発生装置(AFGD: Air Flow Generating Device)を開発(4節)し、その空気流に対するヒトの認知特性(5節)、および嗜好や温冷に関わる感性的・生理的・物理的特徴(6節)を明らかにした。この空気流発生装置(AFGD)は、新しいメディアになり得ると考えられる。(※体性感覚11)に類する感覚という解釈もできる)
H. Yanagisawa, C. Miyazaki, C. Bouchard: Kansei Modeling Methodology for Multisensory UX Design, 21st International Conference on Engineering Design ICED17, pp.159-168, 2017.