海中観測実装工学研究センター
特任助教 松田 匠未

海中観測実装工学研究センター
准教授 巻 俊宏
3.研究事例紹介
ここまで水中ロボットの測位センサを紹介してきた。水中での測位は難しく、手軽に水中調査を行うことは難しいのが現状である。そこで低コストかつ高性能な水中測位を実現することが私たちの研究テーマの一つである。これまで複数のセンサを組み合わせる、「センサフュージョン」という技術を取り入れた測位方法を開発してきた。音響、光、慣性、それぞれを組み合わせることでそれぞれの弱点を補う。人が目だけでなく、耳や足など様々な情報を組み合わせて自分の位置を推定することと同様である。この方法を応用することで、これまで防波堤や岸壁等の人工構造物の周辺での高精度な測位手法を開発した3)。

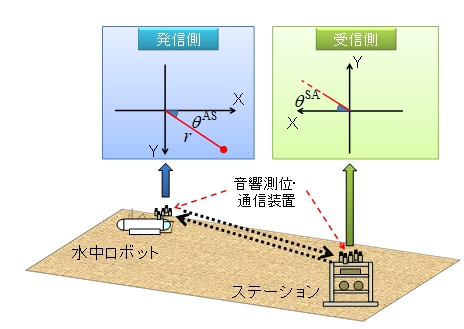
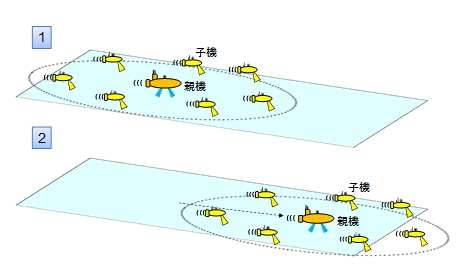
さらに複数のロボットや海底ステーションの協調による測位手法の開発にも取り組んでいる。例えば図6のように海底に設置したステーション(固定局)と相互に音響信号をやりとりして相対位置を求め、さらに自分の持つセンサと組み合わせることで、固定局の周囲での高精度な測位や海底画像マッピングを行う手法を開発した4)。また固定局ではなく、移動するロボット同士に応用することで、複数のロボットが協調して広い範囲の海底を観測することができるようになる。このような運用方法をマルチビークルといい、海中ロボティクスにおいて現在ホットな研究テーマになっている。例えば図7のようにINSやDVLなどを組み合わせて高性能な測位性能を有するAUV(親機)が移動式音響ランドマークとなることで、シンプルな測位センサしか搭載されていないAUV群(子機群)も親機と同程度の測位性能を実現することができる5)。親機のコストはかかるものの、1台の親機を核として低コストな子機群を高精度に運用できるようになるため、システム全体のコストを抑えられる。このように複数のロボットを用いることで観測効率だけでなく、測位精度も向上できる。
次週に続く-
参考文献
2) iXblue, https://www.ixblue.com/
3) 巻俊宏, 近藤逸人, 浦環, 能勢義昭, 坂巻隆, “自律型水中ロボットによる人工構造物の観測,” 日本船舶海洋工学会論文集, 1, pp. 17-26, 2005
4) T. Maki, T. Matsuda, T. Sakamaki, T. Ura, J. Kojima, “Navigation Method for Underwater Vehicles Based on Mutual Acoustical Positioning With a Single Seafloor Station,” IEEE Journal of Oceanic Engineering, 38(1), pp.167-177, 2013
5) T. Matsuda, T. Maki, T. Sakamaki, “Accurate and Efficient Seafloor Observations with Multiple Autonomous Underwater Vehicles: Theory and Experiments in a Hydrothermal Vent Field,” IEEE Robotics and Automation Letters (RA-L), 4(3), pp. 2333-2339, 2019
【著者略歴】
松田 匠未(まつだ たくみ)
2012年3月 東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 修士課程修了 修士(環境学)
2012年4月~2015年3月 日本学術振興会 特別研究員
2015年3月 東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 博士課程修了 博士(環境学)
2015年4月~2019年3月 東京大学生産技術研究所 特任研究員
2019年4月 東京大学生産技術研究所 特任助教
現在に至る
・所属学会
IEEE,日本船舶海洋工学会,海洋調査技術学会,日本ロボット学会
・受賞歴
2011年 MTS/IEEE OCEANS 2011 KONA Student Poster Program Second Place Awards
2014年 IEEE OES Japan Chapter Young Researcher Award 2014
・専門分野
知能ロボティクス,フィールドロボティクス,自律型海中ロボット(AUV),マルチロボットシステム,確率ロボティクス
巻 俊宏(まき としひろ)
東京大学生産技術研究所 准教授。
2003年東京大学工学部システム創成学科卒業。
2005年東京大学大学院工学系研究科環境海洋工学専攻修士課程修了、修士(工学)。
2008年東京大学大学院工学系研究科環境海洋工学専攻博士課程修了、博士(工学)。
同年4月東京大学生産技術研究所助教、同年10月〜12月ウッズホール海洋研究所(米国)客員研究員を経て、2010年4月より現職。
専門は海中プラットフォームシステム学。海のフロンティアを拓く岡村健二賞等を受賞。
IEEE, 船舶海洋工学会等の会員。