
生産電子情報システム技術科
特任能力開発教授
岡田 正之
1.はじめに
2013年当時、次世代海洋資源開発として、産学官(文部科学省、経済産業省、国土交通省)連携により、次世代海洋資源開発の基盤的技術から実用化段階までの展開が進行中であり、システムの技術的課題や経済性などに関する検証が積極的に行われていた。これにより、我が国の産業界、学術界、および官公庁の協働を通じて、次世代海洋資源の開発におけるプレイヤー(産業)の育成を図るプロジェクトが着実に進展していた。
このプロジェクトの一環として、沖縄海洋ロボットコンペティション(以下、沖縄海洋ロボコン)開催を考えるに至った。この大会は、「国内企業等の技術力および経験の蓄積」、「包括的なエンジニアリング能力の取得および増強」、「人材育成」を通じて、資源開発のリーダーシップ九州職業能力開発大学校を担う人材の育成を目指している。こうした取り組みを通じて、海洋資源開発の重要性を認識し、その未来に向けての持続的な展望を築くとともに、我が国の技術とイノベーションの力強さを証明する場としての役割を果たしていくことを目的としている。
また、次世代海洋資源開発において、地理的条件が最も適している場所として沖縄が挙げられる。特に、沖縄近郊の東シナ海領海における海底調査が太平洋側に比べて遅れている現状がある。この地域には、深海1000メートル以内において熱水鉱床や天然資源が存在する可能性が高いと考えられており、これに着目し、海底探査で自律型無人潜水機(以下、AUV)を活用して推進していく。
さらに、沖縄海洋ロボコンは、全国および近隣諸国の研究機関を招聘し、技術交流を含む研究会を定期的に開催することで、技術力向上を図るプロジェクトである。これらの交流会は海洋関連テーマを包括的に取り扱い、海洋再生可能エネルギー、海洋バイオテクノロジー、水産業の振興など、幅広い領域にわたる海洋開発に関する議論の場として位置づけられている。これにより、沖縄を未来の海洋開発拠点として確立するための基盤づくりを推進していく。我が国の次世代海洋資源開発は、綿密な計画と協力を通じて、持続可能な未来への架け橋としての役割を果たすことを目指して始まった。
沖縄海洋ロボコンの開催に至るもう一つの要因として、九州職業能力開発大学校で過去に取り組んだ課題、「浅海用AUVEMM(Autonomous Underwater Vehicle for Electro-Magnetic Measurement)の開発」が大きく関わっている。まず、このテーマについて述べる。
2.浅海用AUVEMMの開発
 図1.21世紀に入り発生した地震の震源分
図1.21世紀に入り発生した地震の震源分
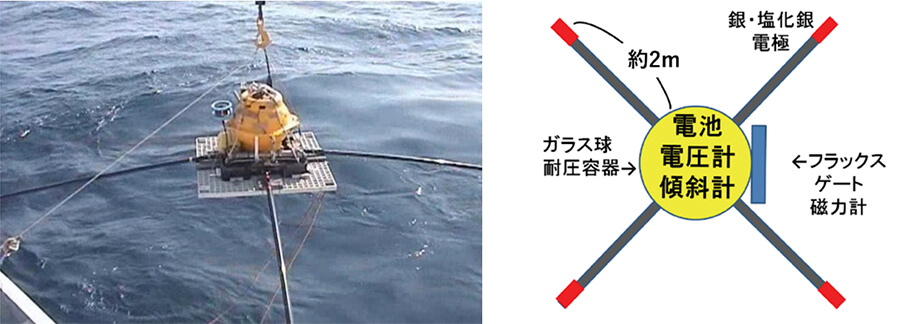
特に、複雑で活発な低層流のある浅海底において、極微小な自然電磁場変動を計測する機器OBEM[1](Ocean Bottom Electro – Magnetometer:海底電位差磁力計)は実用化されていなかった。そこで、水深200m程度までの浅海底(沿岸域から大陸棚領域)において、自然電磁場変動を計測する機器の開発に取り組むこことした。図2にOBEMの構成図を示す。
山陰沖での海底電磁場観測を2007年6月25日から8月22日まで実施した。観測場所は、山陰沖の水深243mの101箇所で、図3に示す。
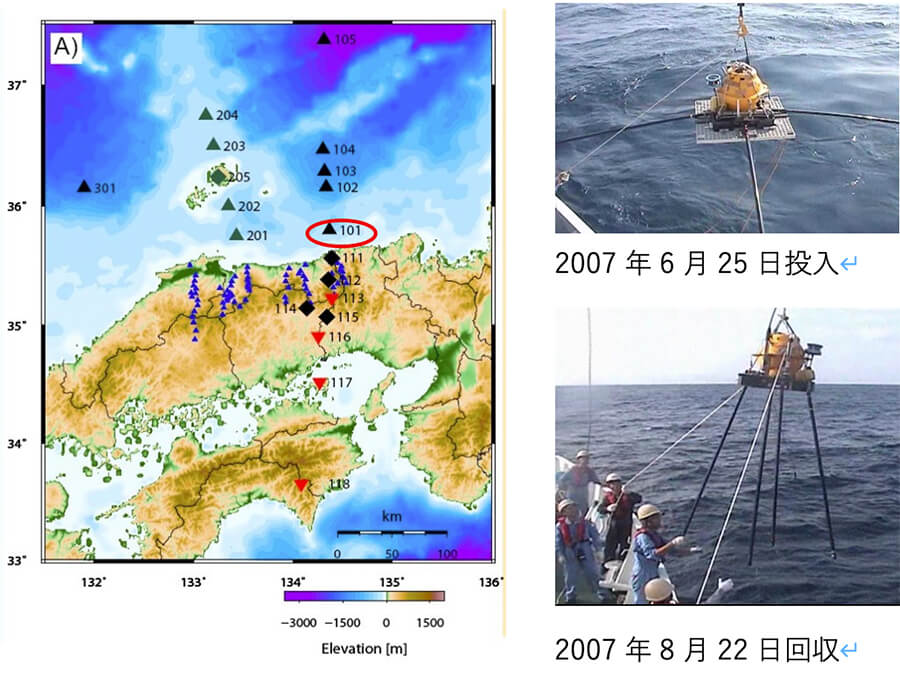
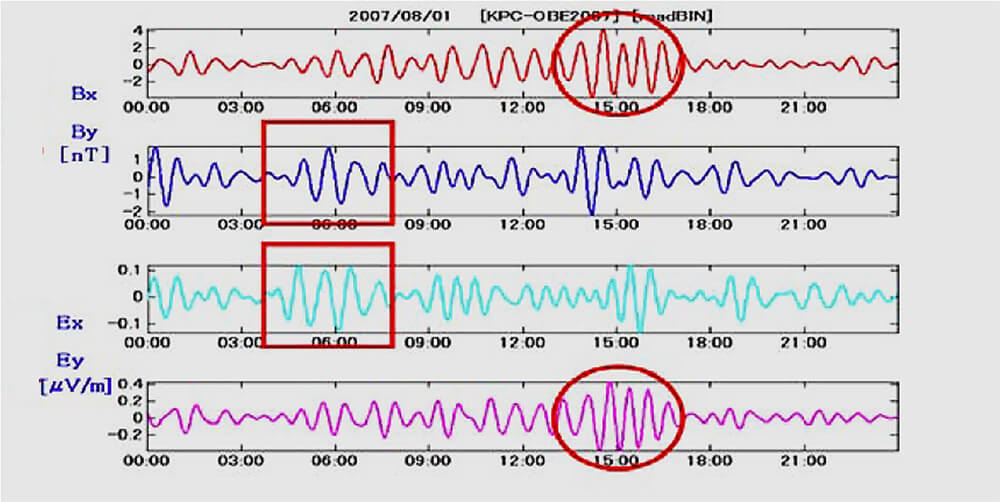
図3で示した通り、自然浮上による回収作業のため何処に浮上するか分からず何回か回収に失敗した経験もある。図4に8月1日における海底電磁場データを示す。□と○で囲まれた箇所のデータでBxーEy,ByーExが高相関となっている。このことも含めて、この測定値は信頼できる結果であると言え る。
OBEMでの電磁場観測では、長期間海底での観測および自然浮上による回収のため常に観測装置をロストする危険がある。
従来の電磁場変動計測機器では、設置・回収に時間と労力を要した。そこで、より短周期の電磁場変動を観測するために、自律型海中ロボットを用いた電磁場変動計測機器AUVEMM[2](Autonomous Underwater Vehicle for Electro-Magnetic Measurement)の開発に着手した。
電磁場変動計測装置部は、既存の技術を活用することで順調に開発することができたが、AUV(Autonomous Underwater Vehicle)の開発は、作成経験がなく、また、技術的な課題も多く、難航した。その結果、担当学生のモチベーションが低下し、開発が停滞する状況となった。
このような状況を受け、学生から他大学の海洋(水中)ロボット分野における技術力や技術交換も含めて競技会等の要望があった。そこで、海での海洋ロボット大会を開催する試みを行った。
3.海洋ロボットコンペティションin沖縄開催
はじめにでも述べたように、沖縄21世紀プランにおいても次世代のリーディング産業の一つとして海洋産業を掲げている。一方、沖縄には海洋資源分野の專門の研究施設がなく研究者・技術者・学生等の專門的スキルアップが図れない状況にある。
そこで、長崎大学 山本郁夫教授の協力で沖縄県内閣府でのプレゼンテーションが功を通し、予算面等で協力体制ができた。
これにより県内の高等教育機関や企業等の研究開発成果を発表する場となるとともに県民や児童生徒・学生の沖縄の海洋資源関連産業や海洋ロボットの可能性について理解を深める場となる。この趣旨で、企業及び大学院、大学、高等工業専門学校(高専)、専門学校等によるグループまたは個人による参加を呼びかかけた。コンテスト部門としては、ROV(Remotely Operated Vehicle)、AUVに分かれての競技とした。審査方法は、1)独創性・コンセプト、2)運動性能・技術性、3)プレゼンテーション、4)実機デモンストレーションを評価基準とした。
3-1. AUV仕様
水中ロボットコンテスト競技大会は、10年以上の歴史を持つ大会で水中ロボット開発や人材育成に大きく寄与している大会である。この競技大会は、プールを使用しての大会であり、学生等がアイディアや水中ロボットに興味を持たせるには恰好な大会である。しかし、AUVやROVが実際に活用されるのは海である。AUV(またはROV)は、海水仕様(3)と真水使用では特に防水面において難易度が格段に違ってくるが、我々は敢えて「海洋ロボットコンテストin沖縄」に出場するためにこの難関に挑むこととし開発[3]に着手した。海洋研究開発機構からの援助もあり、吉田弘様から初年度は3回の技術セミナーを開催し参加チームの技術向上に努めた。
3-2. AUVの機構
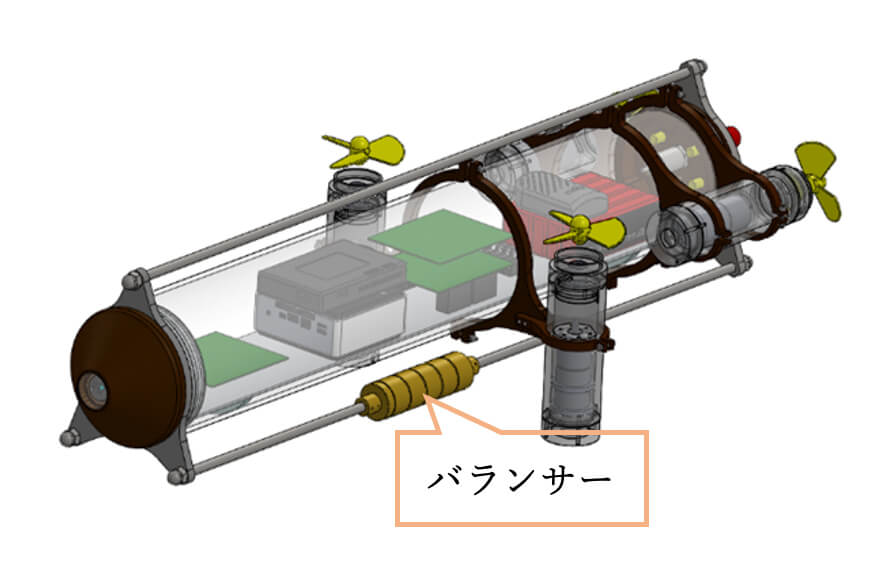
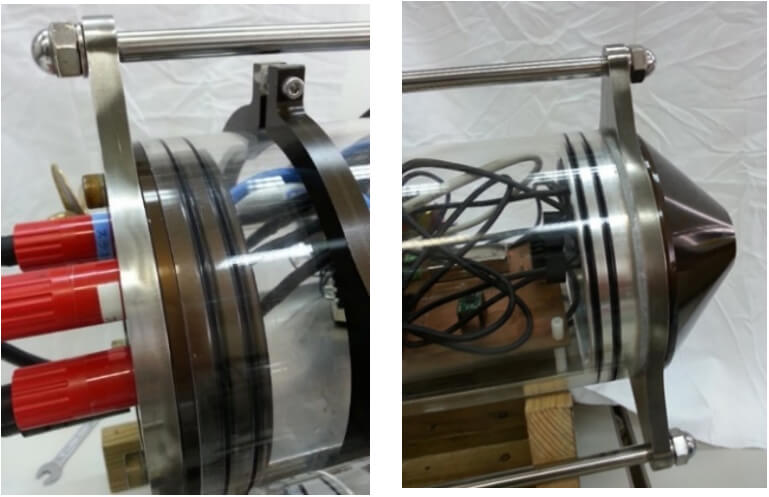
筐体は、図5に示す通りアクリル製とし前後にアルミで蓋をする構造とした。アルミ蓋にはOリングを使用することで防水対策とした。また、浮力と重心を調整するためにバランサーを付けて、海水の比重変化にも対応できるようにした。
① 蓋部分の防水対策について
Oリングを2つ用いて図5に示すように設置する。さらにグリスをアクリルパイプとOリング周辺に使うことで密封性を高めた。合わせて、前後の蓋にはステンレスの板を取り付け、シャフトを通して面接触になるようボルトで固定することにより稼働中に蓋が外れて浸水することを防いでいる。メンテナンスを考えアルミ蓋には、空気抜き用シールプラグの穴を設けている。
② スラスタ
スラスタは、スクリューシャフトに軸ぶれ防止用にカップリングとベアリングを使用して軸の安定化させた。カップリングにはスリット型を使用し、オイルシールとベアリングの空間にはグリスを注入して防水効果を高めている。動力は、DCモーター駆動で12V(トルク167mN-m)を使用している。

筐体とスラスタは、学生の設計により作成したものである。外部ケーブルとコネクタ以外は、機械系学生が作成したものである。作成に当たり、セミナーを受けて完成度の高い筐体とスラスタを完成させている。

「海洋ロボットコンペティションin沖縄」プレ大会の優勝AUVである。搭載しているセンサ類は、USBカメラ、3軸地磁気センサ(方位)、センサ(深度)と加速度センサを載せている。
3-3. 大会参加者の推移
会場は、北谷町海岸(1)、波の上(2)、宜野湾漁港(6)と場所は変更しながら開催してきている。ROV競技は順調に参加者はいるが、AUV競技については伸び悩んでいる。第8回からは、韓国のチームも参加するようになって国際大会に発展しつつある。第9回大会からは、企業協賛金と参加費での運営となり協力企業が集まらなければ中止となる。
また、第4回からは知能チャレンジ部門を設け、この大会から新たな技術を提供する試みを始めた。第8回大会の知能チャレンジの技術報告を紹介する。
| ROV | AUV | フリー | 知能チャレンジ | ||
|---|---|---|---|---|---|
| ROV | AUV | ||||
| プレ大会 | 6 | 5 | 1 | ||
| 第1回 | 9 | 4 | 1 | ||
| 第2回 | 6 | 3 | 2 | ||
| 第3回 | 8 | 5 | 5 | ||
| 第4回 | 6 | 6 | 1 | 1 | 0 |
| 第5回 | 6 | 6 | 1 | 1 | 0 |
| 第6回 | 7 | 3 | 9 | 1 | 2 |
| 第7回 | 7 | 3 | 7 | 2 | 2 |
| 第8回 | 13 | 4 | 4 | 3 | 中止 |
次回に続く-
参考文献
- 浅海用OBEMの開発 平成19年度開発課題報告書、九州職業能力開発大学校 2007年
- 浅海用AUVEMMの開発 平成21年度開発課題報告書、九州職業能力開発大学校 2009年
- 海中ロボットの開発 平成26年度開発課題報告、沖縄職業能力開発大学校
【著者紹介】
岡田 正之(おかだ まさゆき)
九州職業能力開発大学校 生産電子情報システム技術科 特任能力開発教授
■略歴
- 1981年 3月東海大学工学部光学工学科卒業
- 1990年 4月北九州職業訓練短期大学校講師
- 1993年10月国際協力事業団出向 ブラジル国長期派遣
- 1995年 6月北九州職業能力開発短期大学校 情報技術科 講師
- 1999年 4月九州職業能力開発大学校 専門課程 情報技術科 准教授
- 2000年 3月九州芸術工科大学大学院 博士後期課程修了
- 2002年 4月九州職業能力開発大学校 応用課程 生産情報システム技術科 教授
- 2013年 4月沖縄職業能力開発大学校 応用課程 生産情報システム技術科 教授
- 2016年 4月九州職業能力開発大学校 応用課程 生産情報システム技術科 教授
- 2020年 4月九州職業能力開発大学校 応用課程 生産電子情報システム技術科 特任能力開発教授
2014年から沖縄海洋コンペティションに実行委員として参加