
生産電子情報システム技術科
特任能力開発教授
岡田 正之
4.知能チャレンジ(ROV部門)
競技課題として、海中建造物の表面欠陥検出。
必要な技術
・安定したホバリング制御:海中環境は、波浪や潮流などの影響を受けやすいため、安定したホバリング制御が求められる。そのため、制御アルゴリズムや機体設計などの技術が必要となる。
・画像処理:海中環境では、光の減衰や乱反射などの影響により、画像の品質が低下する。そのため、画像処理技術を用いて、傷などの欠陥を検出する必要がある。
・海中環境下での期待制御:海中環境では、水圧や水流などの影響により、機体の挙動が変化する。そのため、海中環境下での機体制御技術が必要となる。
第8回海洋ロボットコンペティションin沖縄で長崎大学 山本郁夫研究室のメンバーがチャレンジした内容[4]を示す。
2台のカメラを搭載、1台目は正面(フロントカメラ)、2台目は下部(海底方向カメラ)である。
① フロントカメラ を用いた テンプレートマッチング による 定点保持
水中では波の影響で光の当たり方がフレームごとに変化すると考えられるため 、 その影響を抑えるために類似度計算の手法として零平均正規化相互相関 (ZNCC) を使用した 。式(1)ではテンプレート画像の輝度値をT(i,j) 、被探索画像の輝度値をI(i,j)とした 。座標(i,j)はテンプレートの幅をM画素、高さをN 画素としたとき、左上を原点、右下を(M-1,N-1)とした 。
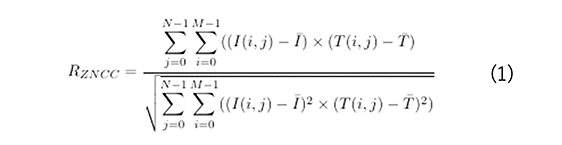
式では、各輝度値から平均値を引いた後の正規化相互相関を計算することで、I(i,j),T(i,j)をそれぞれ画像領域内の濃度値分布と考え、統計量としての相互相関係数を計算することで照明変化に 対するロバスト性の向上が可能となった。 および
および は領域内の輝度値の平均値を示している。
は領域内の輝度値の平均値を示している。
② 海底方向カメラを用いたオプティカルフローによる奥行制御
オプティカルフローによる画像処理に基づいたPID制御を採用する。オプティカルフローとは動画中の2枚の隣接した画像間フレームにおいて、移動前の画素と移動後の画素をベクトルで示したものである。オプティカルフローにおいての類似計算方法についてはLucas Kanade 法 勾配法を用いる。これはいくつかの条件を設けることで解を推定する手法である。
・移動前後の輝度分布が変化しない
・画像が時間的に微分可能である
・移動量が微小である
・近傍画素も同等のベクトル量になる
速度ベクトルV(u,v)}で移動する物体があるとする。時刻 t で輝度E(x,y)の点がdt後にE'(x+u,y+v)へ移動したとする。
移動前後の輝度より

移動量が微小より

したがってEからEへの輝度勾配をdEとするとベクトルの内積を用いて、

隣接する点について

この式から最小二乗法を用いて一意の解を得ることができる。
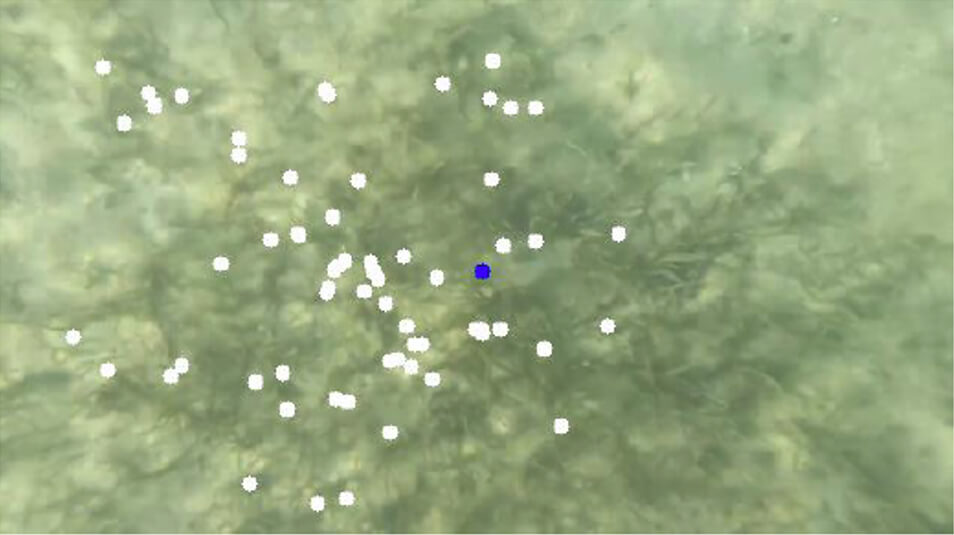
図9で示した海底撮影によるOptical Flow画像である。白点が特徴点で、十分に取れていることが分かる。この画像で奥行き制御を行うことで、より精度の良い定点保持を実現した。
5.知能チャレンジ(AUV部門)
競技課題としては、海中測位手段を発案し、開発した装置を用いて競技
(但し、補助装置として音波発生器を目標地点に設置している。)
第8回海洋ロボットコンペティションin沖縄で、九州工業大学 西田裕也研究室メンバーがチャレンジした内容[5]を示す。
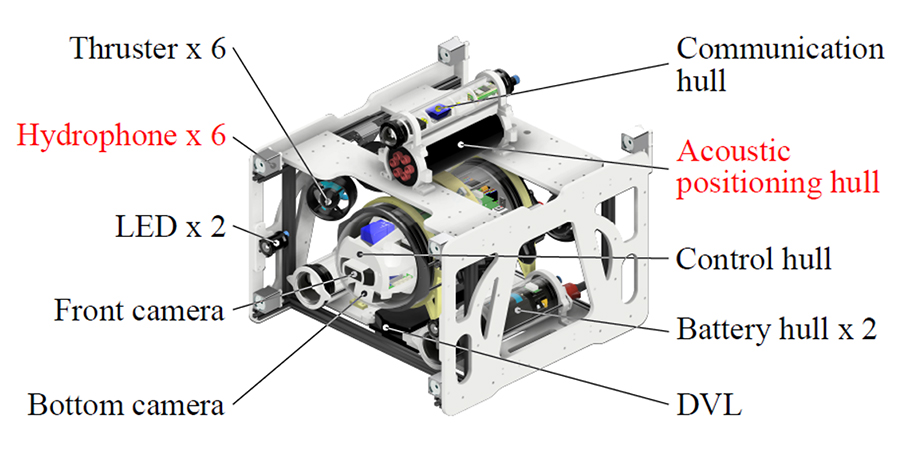
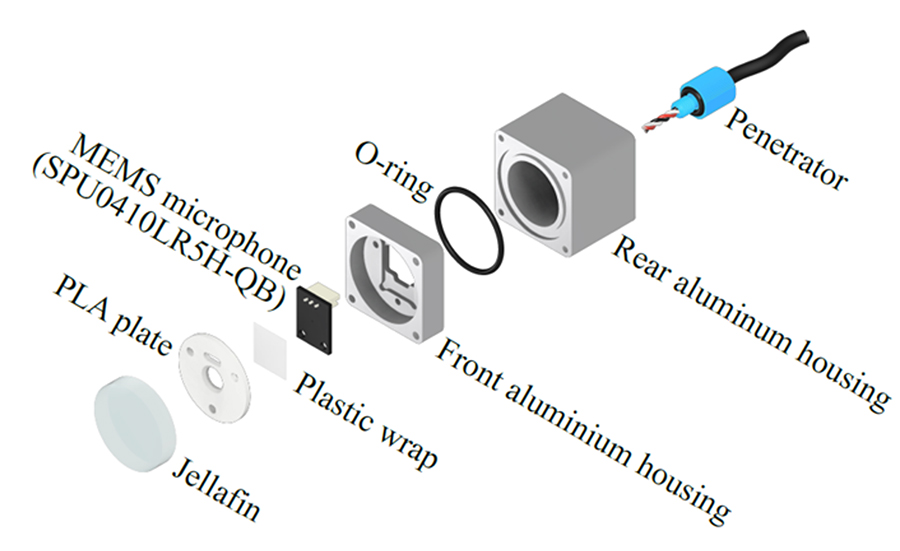
・MEMSマイクを用いたハイドロフォン
耐圧樹脂を用いてMEMS マイクを水中環境においても使用可能にする特許[6]に基づいて制作されている。センサ部分は耐圧樹脂Jellafin[7]を流し込むことで防水性を確保しつつも音波を受信できる。
・SBL(Short Base Line)方式
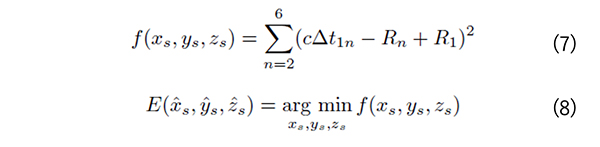
SBL 方式を図12に示す。図12左はハイドロフォンが4つの場合の例、図右が
Y軸の方向から見たハイドロフォン1 とハイドロフォン2の関係を表している。nはチャンネル番号,R はスラントレンジ[m]、xs,ys,zsは音源座標[m]、xn,yn,znは各ハイドロフォンの座標[m],∆R1nチャンネル1 と各ハイドロフォンのスラントレンジの差である。この図から関係式を導くと式(6)となる。∆t1nはチャンネル1 と各ハイドロフォンの到達時間差[s],c は音速[m/s] である。
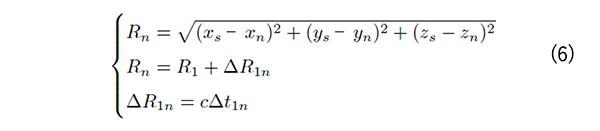
座標推定には、式(6)を満たす音源座標を計算する必要がある.計算には、局所解に強く導関数が不要で比較的収束の早いPowell 法による数値最適化を用いている。式(6)より目的関数を式(7)のように定義し、この目的関数を最小化する を着底位置の推定座標Eとした。
を着底位置の推定座標Eとした。
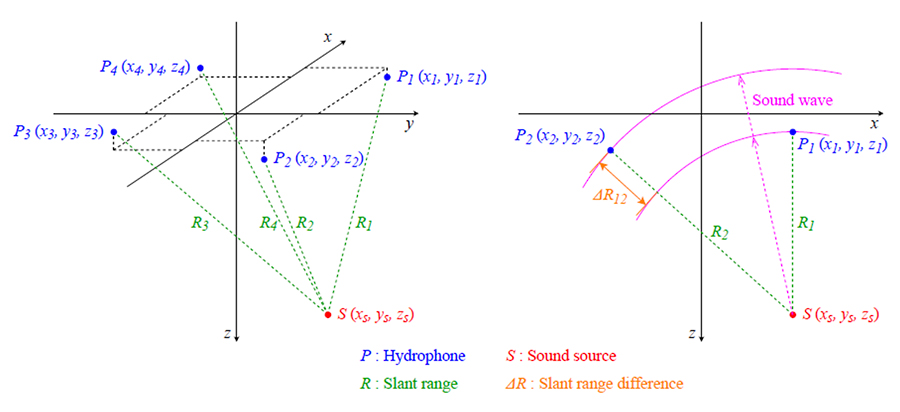
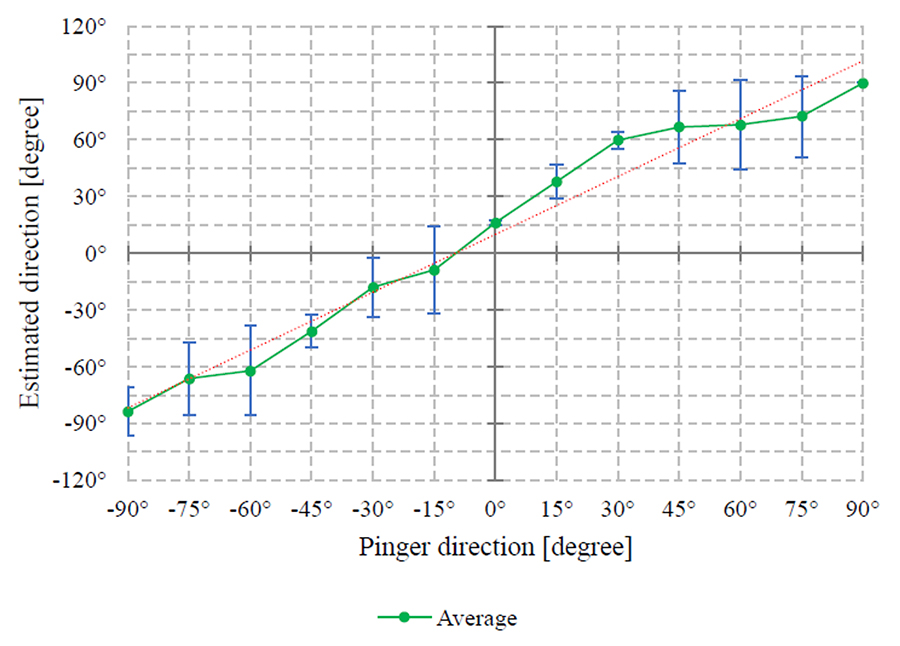
・SSBL(Super Short Base Line)方式による角度推定
SSBL方式を図13に示す。機体の前方下部に取り付けた2つのハイドロフォンを使って音波の到来方向を推定した。SSBL方式では、2つのハイドロフォンの間隔をベースラインとし、音源が平行に到来するものと仮定する。この仮定のもと関係式を導くと、式が得られる。θは推定角度[deg]、cは音速[m/s]、Δt は遅れ時間[s]、Bはベースライン[m] である。式より、2つのハイドロフォンの音波受信タイミングの差である遅れ時間から音波の到来角度を推定した。なお,ピンガは前方にあるものと仮定し、−90 から+90 deg の範囲で角度を推定した。

図14にSSBL方式による実験結果を示す。紙面の都合でSBL方式の実験結果は省略したが、ハイドロフォン検証に関してはSSBL方式かSBL方式のどちらかで可能である。
6. おわりに
海洋ロボットコンペティションin沖縄は、海洋産業の人材育成と技術発展を目的とした大会である。競技会を始めた当初のAUVは、防水を中心とした最低限の装備であったが、第4回大会から知能チャレンジを設けることで、制御系およびセンサ類を活用する動きが出てきた。知能チャレンジ部門のROVとAUVは、大会側の課題をクリアした機体であり、参加チームの創意工夫により、より良い制御方法等が紹介・実用化されている。
今後は、参加チームのさらなる創意工夫を促進し、海洋ロボットの技術発展に貢献していきたい。そのためには、企業協賛金の獲得が不可欠である。各企業様には、海洋ロボットコンペティションin沖縄の趣旨をご理解いただき、広く協賛いただけることを期待している。
また、海洋ロボットコンペティションin沖縄の実行委員、沖縄職業能力開発大学校、琉球大学、沖縄工業高等専門学校の皆様方の多大なご助力に感謝申し上げる。
参考文献
- 長崎大学 山本研究室知能犯 REMONA 技術解説書 第8回沖縄海洋ロボットコンペティション 知能チャレンジ(ROV)部門 2022年
- 杉野 晃弘 ハイドロフォンアレイを用いた音源位置推定に関する研究 九州工業大学大学院生命体工学研究科 博士前期課程修士論文 2022年
- 国立大学法人東京大学 水中音響マイクロフォン 水中音響マイクロフォンの製造方法 特開2021-197629.2021-12-27
- エスイーシー・シープレックス株式会社 “耐圧防水樹脂Jellafin” エスイーシー・シープレックス株式会社 2021年
https://sec-seaprex.co.jp/jellafin/,(参照2023-02-03).
【著者紹介】
岡田 正之(おかだ まさゆき)
九州職業能力開発大学校 生産電子情報システム技術科 特任能力開発教授
■略歴
- 1981年 3月東海大学工学部光学工学科卒業
- 1990年 4月北九州職業訓練短期大学校講師
- 1993年10月国際協力事業団出向 ブラジル国長期派遣
- 1995年 6月北九州職業能力開発短期大学校 情報技術科 講師
- 1999年 4月九州職業能力開発大学校 専門課程 情報技術科 准教授
- 2000年 3月九州芸術工科大学大学院 博士後期課程修了
- 2002年 4月九州職業能力開発大学校 応用課程 生産情報システム技術科 教授
- 2013年 4月沖縄職業能力開発大学校 応用課程 生産情報システム技術科 教授
- 2016年 4月九州職業能力開発大学校 応用課程 生産情報システム技術科 教授
- 2020年 4月九州職業能力開発大学校 応用課程 生産電子情報システム技術科 特任能力開発教授
2014年から沖縄海洋コンペティションに実行委員として参加