
藤原 敏文
1.はじめに
海洋資源探査や海洋構造物の保守点検、海洋経済安全保障等の観点から海中無人機利用に対するニーズが高まっている。
(国研)海上・港湾・航空技術研究所海上技術安全研究所(以下、海技研)では、内閣府戦略的イノベーション創造プログラム(SIP)第1期「次世代海洋資源調査技術(海のジパング計画)」(2014~2018年)でAUV(Autonomous Underwater Vehicle、自律型無人潜水機)、ASV(Autonomous Surface Vehicle、自律型洋上中継機)の複数機同時運用、SIP第2期「革新的深海資源調査技術」(2018~2022年)では「深海AUV複数運用技術に関する研究開発」で複数AUVの隊列制御技術開発を行ってきた1)2)3)。2023年度からは新たにSIPの海洋課題として「経済安全保障プラットフォームの構築」が開始された(2023~2027年、いずれも研究推進法人は(国研)海洋研究開発機構(JAMSTEC))4)。
他方、海洋ロボティクス関連開発の社会的取り組みの必要性から、新たに閣議決定された海洋基本計画(2023年4月)の中では、AUV開発の重要性がより一層強調されている5)。さらに内閣府では官民一体となっての情報共有と技術開発の方向性を同じにしながら国策として効果的政策を打ち出そうと官民プラットフォームを立ちあげ、AUV開発ロードマップやビジョンを打ち出し、施策を進めているところである6)。
複数AUV同時運用に関連した研究開発は、主に水深2000m以浅で存在する熱水鉱床や水深6000m域に存在するレアアース泥を探索するためのSIP事業技術開発として行ってきた。これまで行ってきた技術開発を総括すると共に、今後の展開について言及する。
2.SIP第1期でのAUV開発
従前、1機のAUVを運用母船やASVを使って海底、海中観測を行うことが専らの対応であったが、運用は海上の天候に大きく左右される。さらに高額な傭船、運用費用を鑑みると、単機AUVの運用では作業効率向上が期待できず、複数AUV運用は今後の海洋観測を促進する上で、必須の方策となることが予想された。また、大型のAUVとなると専用支援船、または限られた船での運用に制限されるために、汎用的に利活用が可能な小型・軽量化されたAUVの開発が望まれた。
このような状況下、海技研はSIP第1期で、航行性能が優れ、広範囲の観測が可能な航行型AUVと限られた範囲であるが詳細な海底・海中探索が可能なホバリング型AUV、全 5機を開発するとともに、耐波性能の優れた半没水型ASVを開発した。それらのAUVとASVの外観と仕様を図1、表1に示す。いずれも全長4m以下、重量800kg以下と小型・軽量化された仕様であり、専用支援船を必要としないため、例えば数トン級のクレーンを装備した作業船で運用が十分可能である。
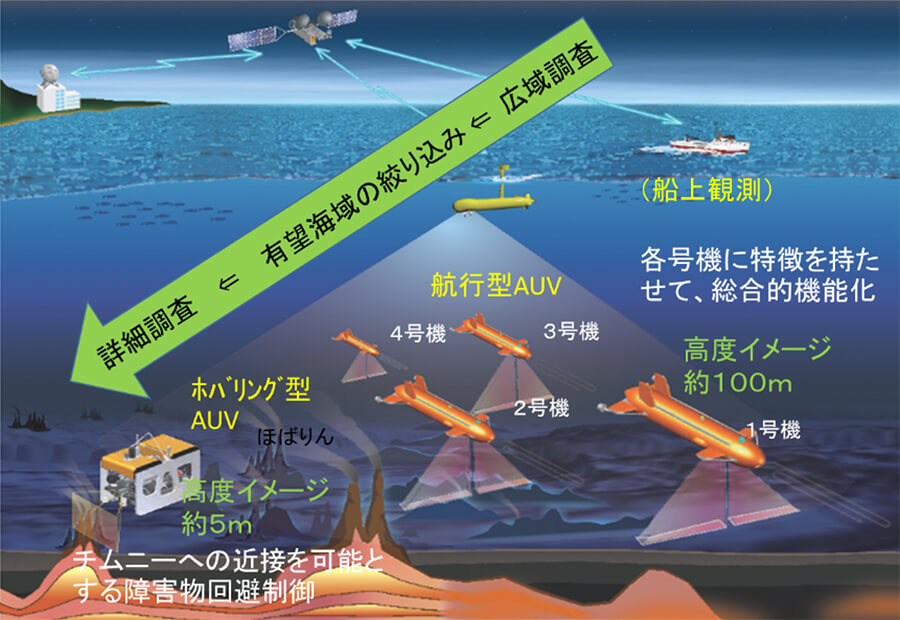
海底鉱物資源探査のための代表的な運用イメージを図2に示す。船舶による広域調査を行いながら水深と海底状況の大まかな様子を把握する。海底鉱物資源が存在すると予想される海域において、航行型AUVを複数機用い、短時間に広範囲の調査を実施する。海技研航行型AUV(2号機から4号機)はMBES(Multi-Beam Echo Sounder、マルチビーム音響測深機)を搭載しており、80~100m程度の海底からの高度で観測を行う。分解能1m以下程度で海底地形を把握できるため、チムニーなど熱水鉱床の存在を把握する事が可能である。その後、熱水鉱床の形状、分布状況などを詳細に映像にて確認することが望まれるため、同地点にホバリング型AUVを投入し、画像データによる状況把握を行う。SIP第1期では、ASVを用いた複数AUV同時運用を実現し、最大5機のAUV同時観測を成功させた。

(写真右から航行型AUV2, 3, 4号機と半没水型ASV、前列はホバリング型AUV“ほばりん”)
3.SIP第2期での複数AUV隊列制御技術による海底観測
SIP第2期では、第1期を上回るAUVの運用効率を目指して、AUV隊列制御技術の開発および海底観測運用の実証を実施した。その中で多機関の種別の異なるAUVの同時利用が要望されるとともに、AUV10機の同時運用を可能とするシステム開発を行うこととした。
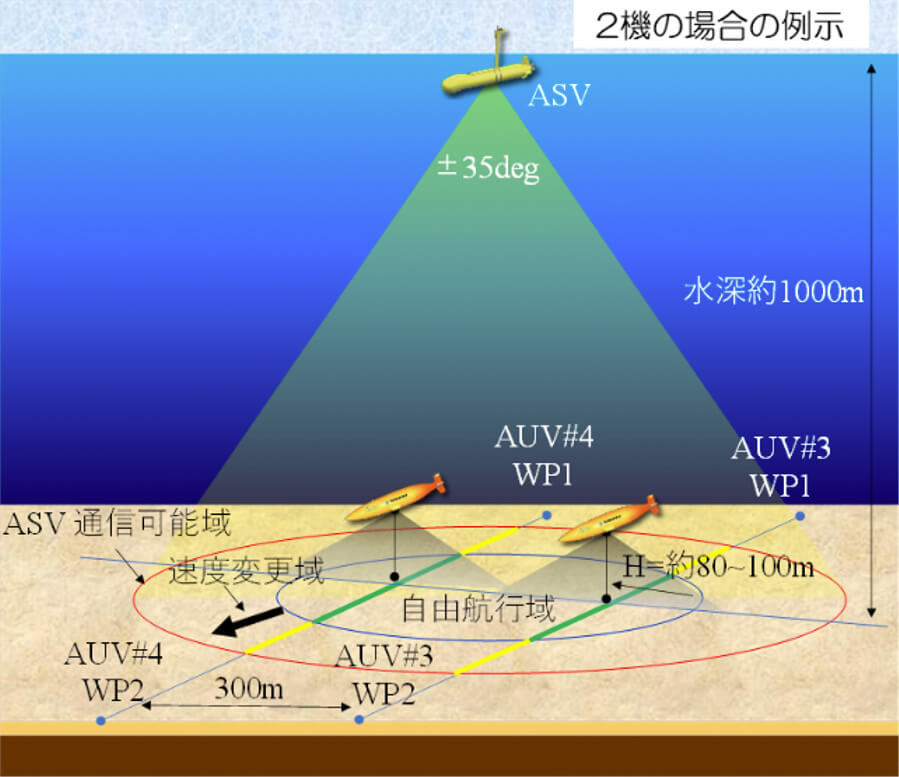
多機関・異機種合同の海底調査等を実施する場合、異なる制御システム・通信プロトコルを有するため、多くの場合、各機関のAUV艇体内制御アルゴリズムを修正する必要がある。そのような状況下、制御アルゴリズムの改変を限りなく少なくし、多数AUVの同時運用を容易に可能とするシステムが望まれた。そこで、ASVを基準(リーダー的役割)として、ASVからの監視から外れそうな事象が生じる場合のみ各AUVに増減速を指示し、絶えずASVの監視域に留まるような隊列制御システム(基本隊列制御システムと呼称)を構築、実海域で複数機AUVを用いてシステムの有効性を検証した。実施概念図を図3に示す。
各AUVは、試験前に計測スタート時刻、スタートまでの待機行動、終了後待機時刻・行動、および航行地点データ(WP、情報としては緯度・経度・深度等)を保持し、水中に投入される。ASVの位置を基準とした図中の自由航行域に全機留まることを基本とし、そこから外れる距離割合に応じてAUVの増減速度を基本隊列制御システムがASVを通じて指示する。

最終的には2022年9月に海技研航行型AUV2、3、4号機、株式会社IHI所有AU3、JAMSTEC所有ASVのKaiKooを用い、技術開発的には10機以上の運用を可能とする隊列制御システムを用い、AUV4機による海底地形観測を実施した。使用したASV、AUVを図4に示す。
駿河湾水深1300m域で行った試験でのMBES観測による海底地形図を図5に示す。MBESの音響ビームのラップ率は50%程度としたが、30%での観測においてもデータの欠如なく観測を行うことができた。結果として、多機関・異機種AUVによる運用を実現、欠測域のない超高解像度海底地形計測に成功した。
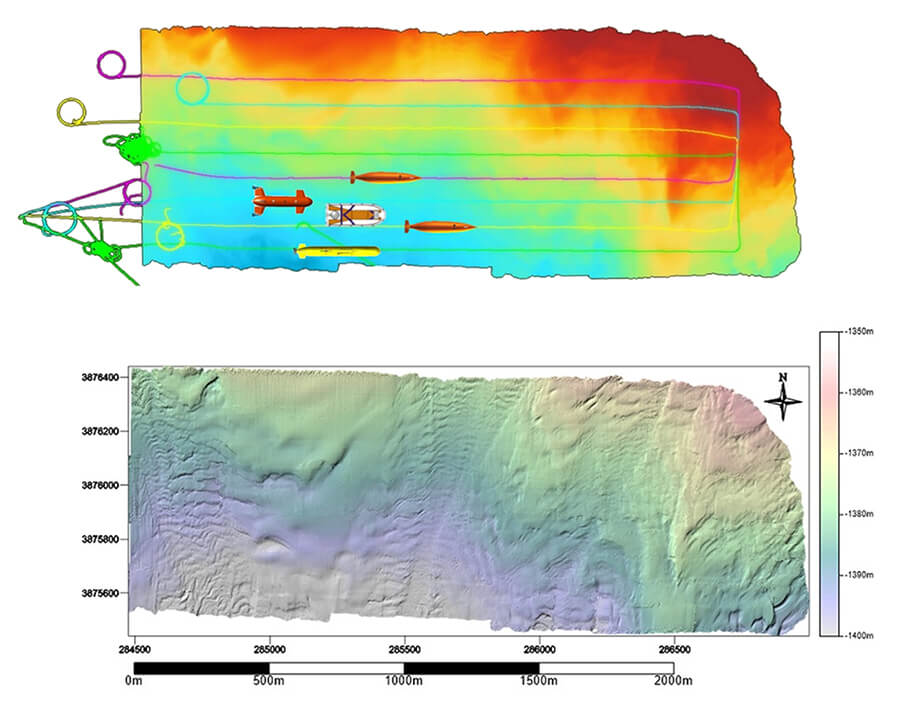
(駿河湾水深1300m域、1m間隔分解能、上図:AUV航路と高低図、下図:同観測域の陰影段彩図)
次回に続く-
参考文献
- 藤原敏文ほか:特集号 海技研AUV研究開発、海上技術安全研究所報告第21巻第4号、2022
- 藤原敏文、金岡秀、篠野雅彦ほか:海技研AUV開発最新状況、海上技術安全研究所報告第21巻別冊、2021
- 金岡秀、佐藤匠、岡本章裕ほか:高度な海洋調査に向けた海洋無人機システム、令和5年秋季日本船舶海洋工学会講演会論文集、2023.11開催
- 内閣府:戦略的イノベーション創造プログラム(SIP)第3期(令和5年~)課題一覧、
https://www8.cao.go.jp/cstp/gaiyo/sip/sip3rd_list.html - 内閣府:第4期海洋基本計画、
https://www8.cao.go.jp/ocean/policies/plan/plan04/plan04.html - 内閣府:官民プラットフォームについて、
https://www8.cao.go.jp/ocean/policies/auv/call_for_participants/auv_index.html
【著者紹介】
藤原 敏文(ふじわら としふみ)
(国研)海上・港湾・航空技術研究所海上技術安全研究所 研究統括監 工学博士
SIP第3期海洋安全保障プラットフォームの構築 海洋ロボティクス調査技術開発 テーマリーダー
■略歴
- 1994年大阪府立大学(現、大阪公立大学)大学院工学研究科修了
- 1994年運輸省船舶技術研究所 運動性能部 研究官
- 2003年英国サウサンプトン大学 工学部船舶科学科 上級客員研究員
- 2004年海上技術安全研究所 輸送高度化研究領域 主任研究員
- 2011年同 海洋開発系 海洋システム研究グループ長
- 2016年同 海洋利用水中技術系 海洋エネルギー研究グループ長
- 2018年同 海洋先端技術系長
- 2021年海上・港湾・航空技術研究所 研究監
(兼)海上技術安全研究所 海洋先端技術系長 - 2023年海上技術安全研究所 研究統括監
船舶・海洋構造物の風・波等外乱下での運動特性に関する研究、安全性評価研究に従事、最近では海洋再生可能エネルギー関連、AUV研究開発に関与
https://researchmap.jp/read0079257