
藤原 敏文
4.SIP第3期におけるAUV技術開発
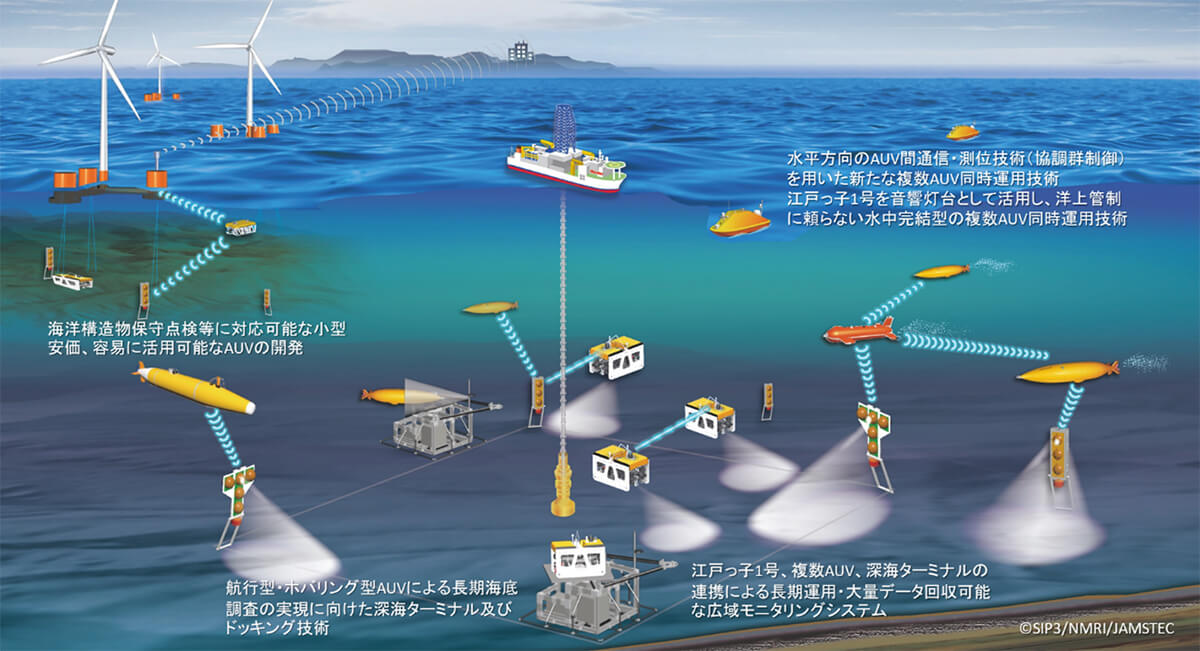
SIP第3期でのAUV技術開発に関する主眼は、AUVや観測機器の相互連携とデータ収集能力の強化による長期的・広範囲の環境モニタリングシステムの構築と言える。前項で対象としていた海底鉱物資源の探索のみならず、CTD(塩分濃度、水温、水深)を始めとする海洋環境評価に必要な情報を、例えば定点観測装置“江戸っ子1号”と周辺状況を把握可能なAUVが連携して収集する。AUVが自身で取得したデータのみならず江戸っ子1号が収集した情報も途中経過としてAUVに集約、さらに海中拠点となりAUV電力供給が可能な深海ターミナルに集約することで、陸上に素早く収集データを転送することを可能とする。このような新たな技術開発と実運用を目標として、2023年度からプロジェクトを開始している。開発イメージを総括して、図6に示す。
従前AUVは運用としてASVとの垂直方向連携のみであった状況をSIP第3期では水平方向AUV連携を進める。さらに江戸っ子1号を海中の道標として活用することで、航行誤差、すなわち観測の欠落や逆に余分な重複観測を大幅に減少させることが可能であり、運用効率の向上が実現できる。その中で、センシングに関してAUVに搭載しながら計測を行う場合は、省電力で計測地点を正確に捉える必要性から小型・高感度のセンサ・機器開発が望まれる。5年後には、“海中の見える化”を大幅に進めることの可能な手段が実証される予定である。
5.おわりに
海底資源探査、海洋環境調査や国防的な観点も含めたMDA(海洋状況把握)、洋上風力発電施設、漁業関連施設等の海上・海中点検での無人化のニーズは今後益々増大すると考える。海洋AUV産業は、世界規模での市場開拓が可能な分野であり、世界的な開発競争が激しいことも事実であるが、我が国の技術レベルが追い付けないほど後塵を拝しているとも思われない。無人機運用による自動観測、計測に対する社会要請は今後益々増大していく中、国内産業・技術の育成と活用、連携がより一層必要とされている。
最後に本技術開発は、内閣府戦略的イノベーション創造プログラムSIP第1期「次世代海洋資源調査技術-海のジパング計画-」、SIP第2期「革新的深海資源調査技術」、第3期「海洋安全保障プラットフォームの構築」(研究推進法人:JAMSTEC)によって実施・計画された内容であることを付記する。寄稿するにあたり関係各位に感謝申し上げる。
【著者紹介】
藤原 敏文(ふじわら としふみ)
(国研)海上・港湾・航空技術研究所海上技術安全研究所 研究統括監 工学博士
SIP第3期海洋安全保障プラットフォームの構築 海洋ロボティクス調査技術開発 テーマリーダー
■略歴
- 1994年大阪府立大学(現、大阪公立大学)大学院工学研究科修了
- 1994年運輸省船舶技術研究所 運動性能部 研究官
- 2003年英国サウサンプトン大学 工学部船舶科学科 上級客員研究員
- 2004年海上技術安全研究所 輸送高度化研究領域 主任研究員
- 2011年同 海洋開発系 海洋システム研究グループ長
- 2016年同 海洋利用水中技術系 海洋エネルギー研究グループ長
- 2018年同 海洋先端技術系長
- 2021年海上・港湾・航空技術研究所 研究監
(兼)海上技術安全研究所 海洋先端技術系長 - 2023年海上技術安全研究所 研究統括監
船舶・海洋構造物の風・波等外乱下での運動特性に関する研究、安全性評価研究に従事、最近では海洋再生可能エネルギー関連、AUV研究開発に関与
https://researchmap.jp/read0079257