
山本 郁夫
3.長崎海洋エネルギー実証フィールドのプロジェクト
長崎は洋上風力発電や潮流発電などの恵まれた海洋エネルギーポテンシャルを有し、2014年に長崎県の海域が国から海洋エネルギー実証フィールドに選定され4)、長崎海洋特区として海洋エネルギーから生み出される新たな産業に期待がかかっている。5)
海洋エネルギーを基盤にすれば、図17に示すような海洋技術クラスター産業が生み出される。6)
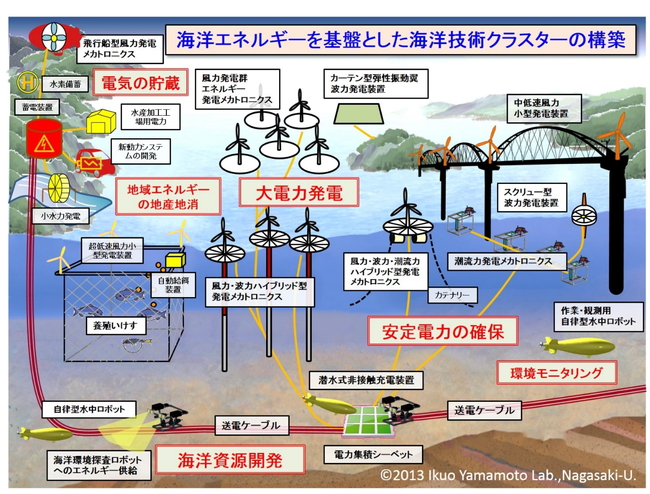
洋上風力発電や潮流発電では施工前の風況や海中海底調査が必要であり、風速計、潮流計、ソーナーなどのセンサをロボット、メカトロニクスに搭載する必要がある。運用時のモニタリングやメンテナンスにもセンサ技術が重要で、遠隔監視カメラや構造物ヘルスモニタリング用センサ搭載のシステムを開発しなければならない。揺れずにメンテナンス船から洋上風車へ移乗できる揺れない移乗機の開発も進んでおり、モーションセンサが制御精度確保のためのキー技術である。また、洋上風力発電や潮流発電の電気エネルギーを給餌装置や魚の生育モニタリング装置に活用するインテリジェント養殖システム(図18)の開発も着々と進んでいる。養殖システム内のモニタリングのみならず、周囲の海域環境を人工衛星や飛行ロボットを用いて、マクロ・ミクロ双方の視点から把握できるシステムも構築されつつある。
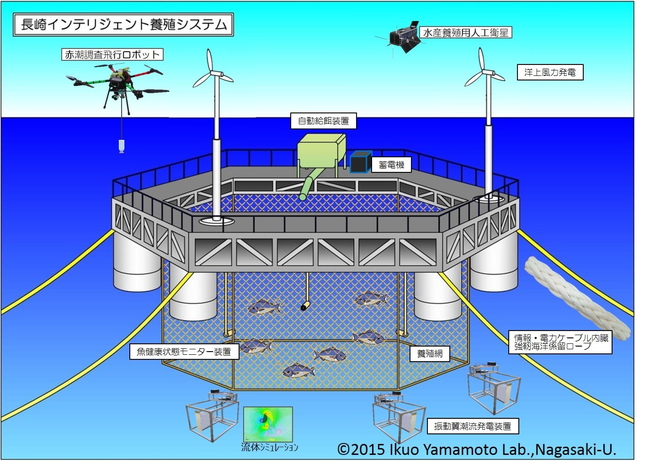
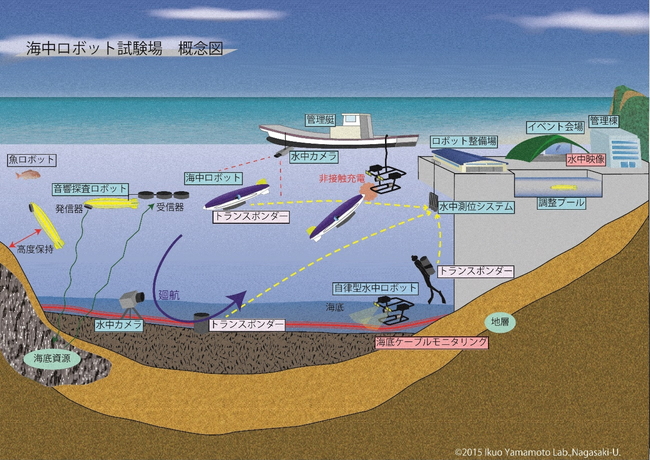
また、係留用ロープも最近では電線入り強靭ロープが開発されており、通信機能を有したインテリジェント化が進んでいくと考えられる。さらに、図19に示すような海中非接触充電によるROV・AUVドッキングシステムにより洋上風車や海底ケーブル点検用AUVの稼働率を向上できるシステムも開発中である。
4.おわりに
ロボットによる海洋計測技術について事例と将来構想を中心に紹介したが、ロボットの主要構成要素であるセンサはますます重要となる。
小型化、軽量、高精度センサが開発されれば海洋計測項目と内容に幅が出てきて、広く海洋IoT技術の発展に寄与できる。
今後もセンサ技術の進展に合わせて、海洋計測に有意なロボットを開発して海洋産業の発展に寄与していきたい。
5.謝辞
本研究の一部は令和元年度総務省戦略的情報通信研究開発推進事業(SCOPE)、および、平成30年度総務省IoTサービス創出支援事業の支援を受けて実施しました。関係各位に感謝の意を表します。
参考文献
4) 森田孝明,長崎県における海洋エネルギー産業の創出に向けた取り組み,沿岸域学会誌,27-3(2014),pp.17-21
5) 山本郁夫,次の産業革命ははじまっている,長崎県工業技術センターだよりCHALLENGE,第184号(2015),p.1
6) 山本郁夫,長崎海洋エネルギー活性化プロジェクト,長崎大学広報誌CHOHO,2015年1月号(2015),p.10
【著者略歴】
山本郁夫(やまもと いくお)
長崎大学副学長・教授
1983年3月 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985年4月 三菱重工本社技術本部、
2004年4月 海洋研究開発機構、
2005年4月 九州大学大学院総合理工学府教授、
2007年4月 北九州市立大学教授、
2013年4月 長崎大学教授、
2019年4月 同大学副学長。
GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業株式会社で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型飛行体や小型水中ロボット、本物そっくりにおよぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでPractical Roboticsの創出法に関する本など多く執筆している。