ロボットと光技術の融合へ―光センサー・システムの高度化が重要(4) 東京大学 石川正俊 ―ロボットと光技術との融合の可能性について、どのようにお考えでしょうか 大きく分けて3つの流れがあります。 光センサーが必要であるというのは先ほどから申し上げてきましたが,一つは小型化です。正確に言う […] 2018年09月25日 特集
「ロボットの神経に期待される超高速分布型ファイバーセンサー」(4) 4.最近の進捗・今後の展開 我々はこれまでに、プラスチック光ファイバー(POF)中のブリルアン散乱を初観測し、そのさまざまな特性を解明してきた7)。すでに、BOCDRによる分布測定も実証し、100 mmの高温区間を検出 […] 2018年09月25日 特集
ロボットセンサの基礎知識(4) 東北学院大学工学部機械知能工学科 教授 熊谷正朗 一方の外界センサは、ロボットが「環境の中で」「環境に対して」動作するために必要となるものである。その作業によっては必須なものであり、場合によってはロボット本体より選定の優 […] 2018年09月25日 特集
ロボットセンサの基礎知識(3) 東北学院大学工学部機械知能工学科 教授 熊谷正朗 センサで測定すること 一方で、ロボット用という範囲で見れば「測定する内容」はじつはそれほどは変わっていない。いうまでもなく、センサの精度・分解能・応答速度は大きく向上し、 […] 2018年09月18日 特集
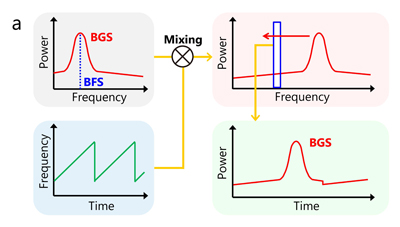
「ロボットの神経に期待される超高速分布型ファイバーセンサー」(3) 3.傾斜利用BOCDR 2種類の超高速BOCDRのうち2つ目は、「傾斜利用BOCDR」6)である。高速化の基本的な考え方は位相検波BOCDRと同様である。すなわち、従来はBGS全体を観測後にピークを与える周波数(BFS) […] 2018年09月18日 特集
ロボットと光技術の融合へ―光センサー・システムの高度化が重要(3) 東京大学 石川正俊 ―具体的にどのようなインパクトがあるのでしょうか? それはロボットを止める必要がなくなるということです。現状は、ロボットが三次元形状計測を行なう際には毎回動作を止める必要があります。止まって画像計測を […] 2018年09月18日 特集
センサイト・キュレーション「ロボットセンサの最新動向」(2) 11.「Robopedia」 運営:NEDO8(新エネルギー技術研究開発機構) ロボットに関する研究開発や教育事例を収集し、共有するためのポータルサイト。どちらかといえば研究機関に所属する技術者向きかも http://r […] 2018年09月11日 特集
ロボットと光技術の融合へ―光センサー・システムの高度化が重要(2) 東京大学 石川正俊 ―では、先生が狙っているところとは? 産業用ロボットの知能を高めていくことです。そのためには,センサーとアクチュエータの高速化,高精度化が重要になります。センサーに関しては,その機能はかなり高まってき […] 2018年09月11日 特集
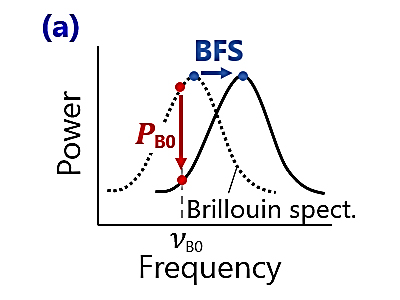
「ロボットの神経に期待される超高速分布型ファイバーセンサー」(2) 2.位相検波BOCDR 2種類の超高速BOCDRのうち1つ目は、「位相検波BOCDR」5)である。従来のシステムでは、電気スペクトルアナライザー(ESA)の周波数掃引機能を用いてBGS全体を取得した後、そのピーク値を与え […] 2018年09月11日 特集
ロボットセンサの基礎知識(2) 東北学院大学工学部機械知能工学科 教授 熊谷正朗 センサの信号面の変化 一般用のセンサが多様化しているように、ロボット用のセンサも様々である。ロボット開発をするために使うセンサとしては、1990年代はまだまだ、「センサそ […] 2018年09月11日 特集