D. Koyama, R. Isago K. Nakamura, Compact, high-speed variable-focus liquid lens using acoustic radiation force, Opt. Express, Vol. 18, No. 24, pp. 25158-25169 (2010)
D. Koyama, R. Isago K. Nakamura, Liquid lens using acoustic radiation force, IEEE Trans. Ultrason., Ferroelect., Freq. Contr., Vol. 58, No. 3, pp. 596-602 (2011)
D. Koyama, R. Isago K. Nakamura, High-speed focus scanning by an acoustic variable-focus liquid lens, Jpn. J. Appl. Phys., Vol. 50, No. 7, pp. 07HE26-1-5 (2011)
D. Koyama, R. Isago, K. Nakamura, Three-dimensional variable-focus liquid lens using acoustic radiation force, IEEE Trans. Ultrason., Ferroelect., Freq. Contr., Vol. 58, No. 12, pp. 2720-2726 (2011)
D. Koyama, R. Isago, K. Nakamura, Ultrasonic variable-focus optical lens using viscoelastic material, Appl. Phys. Lett., Vol. 100, No. 9, p. 091102 (2012)
D. Koyama, M. Hatanaka, K. Nakamura, M. Matsukawa, Ultrasonic optical lens array with variable focal length and pitch, Opt. Lett., Vol. 37, No. 24, pp. 5256-5258 (2012)
D. Koyama, Y. Kashihara, M. Hatanaka, K. Nakamura, M. Matsukawa, Movable optical lens array using ultrasonic vibration, Sens. Actuators A, Phys., Vol. 237, No. 1, pp. 35-40 (2016)
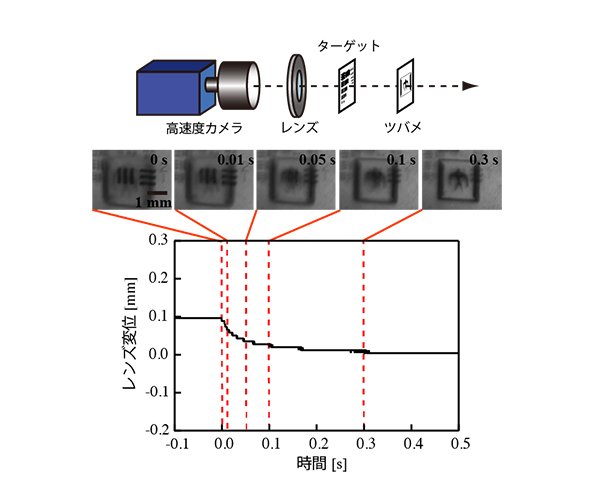
D. Sakata, T. Iwase, J. Onaka, D. Koyama, M. Matsukawa, Varifocal optical lens using ultrasonic vibration and thixotropic gel, J. Acoust. Soc. Am., Vol. 149, No. 6, pp. 3954-3960 (2021)
S. Taniguchi, D. Koyama, K. Nakamura, M. Matsukawa, Fabrication of an optical lens array using ultraviolet light and ultrasonication, Ultrasonics, Vol. 58, No. 4, pp. 22-26 (2015)
消化管内腔が見えるようになると、粘膜表面の癌が肉眼で判別しにくいなど、通常の光学観察で病変特定が困難なケースが多く存在する事が分かってきた。そこで近年は早期癌や炎症を検出する新たな画像解析技術の研究開発が行われている。Olympus社のNarrow Band Imaging(NBI)や富士フイルム社のFlexible spectral Imaging Color Enhancement(FICE)など画像強調技術は臨床応用も順次進んでおり、この分野でも日本が世界をリードしている3)。
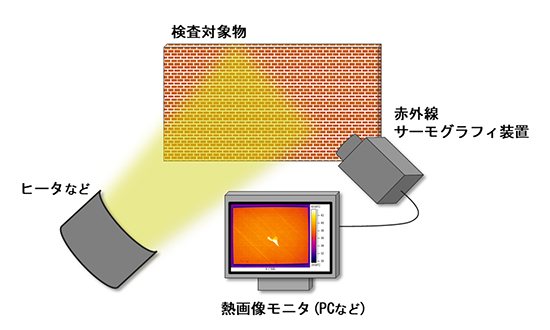
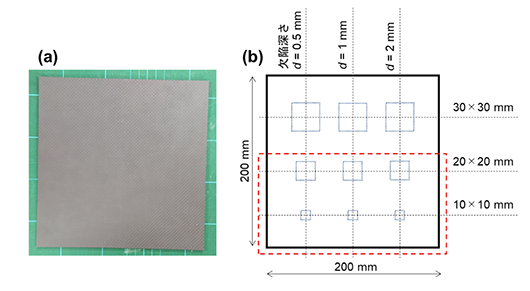
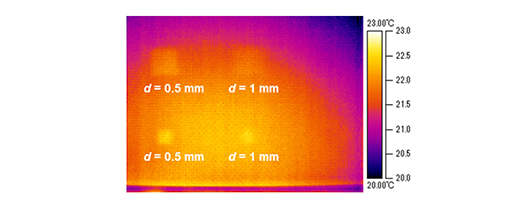
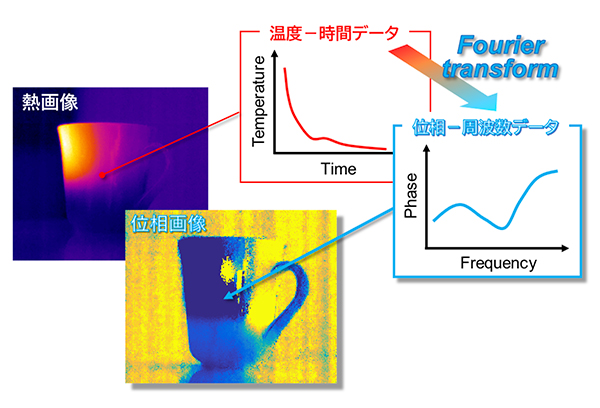
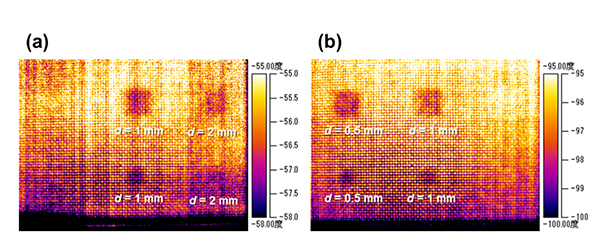
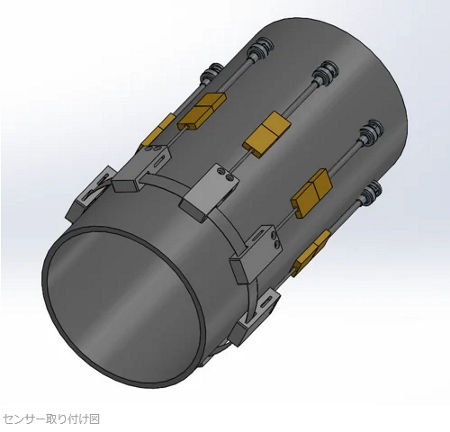
非冷却型マイクロボロメータを検出素子とする赤外線サーモグラフィ装置を用いた アクティブサーモグラフィ法による非破壊検査 Active thermographic nondestructive testing using infrared thermography with uncooled microbolometers(1)
X. Maldague, S. Marinetti. Pulse phase infrared thermography. Journal of applied physics, 79(5), 2694-2698, 1996.
X. Maldague. “Theory and practice of infrared technology for nondestructive testing”, John Wiley & Sons, New York, 2001.
M. Ishikawa, H. Hatta, Y. Habuka, R. Fukui, S. Utsunomiya. Detecting deeper defects using pulse phase thermography. Infrared physics & technology, 57, 42-49, 2013.
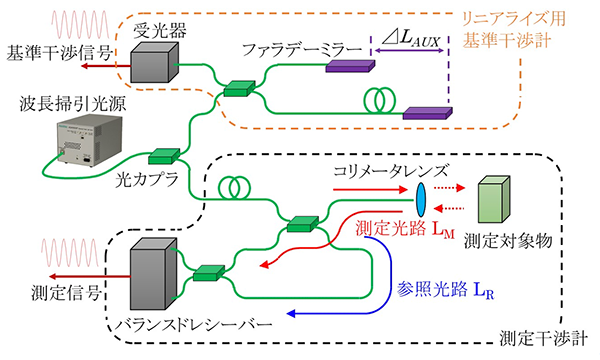
スマートファクトリー化の一環として、製品の形状検査は接触式測定から非接触式の光学測定へ置き換えが進められている。これにより、従来抜き取り検査で行われてきた製品の形状測定をインラインで、かつ全数検査とすることが可能となる。更に省人化や生産性の向上も期待できる。光学測定による非接触・非破壊検査の手法には、白色干渉法やOCT(Optical Coherence Tomography)など種々の干渉計測法があるが、これらの手法は数µm~数mmの測定レンジでnm~µmオーダーの高精度測定が実現できる特長を持つ。このため、小面積で浅い深度に対する近距離・高精度測定に適している。反面、対象物がcm~mオーダーの大面積である場合、一度に測定できる狭い範囲に分割して対象全体を少しずつ測定するため、時間や手間がかかる。大面積の測定対象物に対して、測定レンジ、測定精度共に最適な手法がOFDR(Optical Frequency Domain Reflectometry)である。本手法はFMCW(Frequency Modulated Continuous Wave)法としても広く知られている技術である。波長掃引光源を用いた干渉計測法であるOFDRは、測定対象物からの反射光と参照光との間で生成される干渉信号から、測定対象物までの距離を高精度に測定する手法であり、数cm~数mまでの距離を数µmの精度で測定可能である。その特長からLiDAR(Light Detection And Ranging)向けなどへの応用が進められている。ここで利用される波長掃引光源は、測定に要求される分解能や速度によって、適切な仕様の光源を選択する必要がある。例えば、高い位置分解能を得るためには、波長掃引幅が広い光源を必要とし、高速に移動する対象物の位置に応答して測定するためには、波長掃引周波数の高い光源が必要である。また、測定可能範囲を広げるためには可干渉距離(コヒーレンス長)の長い光源を選択する必要がある。高コヒーレントな光源を用いることで、OFDRの干渉信号を高いSNR(Signal to Noise Ratio)で測定でき、位置分解能や測定精度を向上させることもできる。
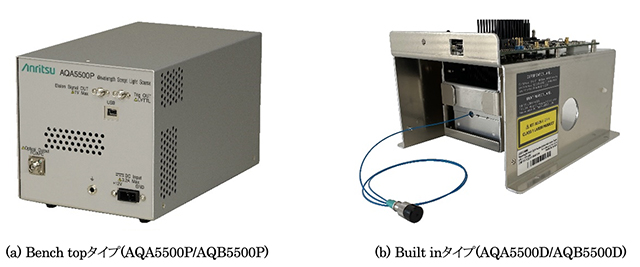
当社では高コヒーレントな波長掃引光源を開発し、販売を行っている(AQA5500P、AQB5500P、AQA5500D、AQB5500D)1)。本波長掃引光源は、MEMS(Micro Electro-Mechanical System)スキャニングミラーとグレーティングを用いたリットマン型の外部共振器レーザーであり、下記の特長をもつ2),3)。
① kHzオーダーの高速波長掃引(AQA5500P、AQA5500Dの場合)
② 単一縦モードの狭線幅レーザーによる高コヒーレンス性
③ モードホップ(波長跳び)がない連続的で、かつ広い波長掃引幅
本稿では、当社が開発した波長掃引光源の製品仕様について説明した後で、本波長掃引光源を利用したOFDRによる形状計測について基本原理および実測例を示す。
K. Nakamura, S. Morimoto, and T. Nakayama, “Single-Mode and Mode-Hop-Free Wavelength Sweep Light Source with Range of Over 160 nm and High Swept Frequency,” IEEE Photonics Technology Letters, Vol. 22, No. 19, Oct. 2010.
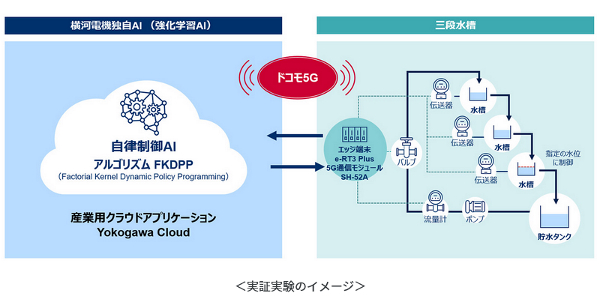
横河電機とドコモは、産業において5G活用を促進する5G-ACIA(5G Alliance for Connected Industries and Automation)に加盟しており、プラントにおける5Gの有効利用について今後も検討し、活用を促進していく。また、さまざまな利用者のプラントにおいての実証も視野に、長期間稼働させた際の通信の信頼性や遅延の変化などを確認していくことで、5Gを活用したAI自律制御の実現に取り組んでいくとのこと。
▮本製品の特長
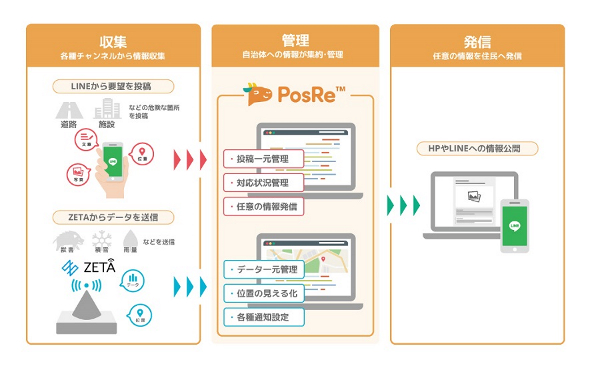
① 住民からの要望集約・対応管理・発信をワンストップで提供
住民からの要望や困りごとが自治体の公式LINEアカウントに投稿されると、「PosRe™」上で自動的に集約、担当部門の職員に通知される。案件ごとの対応状況は職員の間で共有され、必要に応じて自治体のウェブサイトや公式LINEに公開される。
② 住民のインターフェースとして普及率の高いLINEを採用
国内人口の70%以上をカバー(※2)し、メッセージングアプリとして広く普及しているLINEを、住民側のインターフェースとして採用した。これにより、住民は特別なアプリをダウンロードすることなく、自治体への要望を、画像や位置情報を添付して投稿することができ、また自治体からの情報もLINE上で入手することができる。
③ 地域内に設置のセンサを遠隔監視、タイムリーな情報収集を実現
凸版印刷が普及を推進する次世代LPWA(低消費電力広域ネットワーク)規格ZETA(ゼタ)(※3)との連携により、「PosRe™」と接続した各種センサが、オフィスや教育関連施設の温湿度、照明、二酸化炭素濃度や、豪雪地域の降雪量、獣害対策エリアでの罠作動状況などを遠隔監視する。自治体職員は現地へ赴くことなく、地域の該当個所の状況を把握できる。
▮販売開始時期と価格
販売開始時期: 2022年5月30日
システム使用料: 月額70,000円
※1 https://www.soumu.go.jp/menu_news/s-news/01gyosei07_02000106.html
※2 「LINE Business Guide 2022年1月-6月期」より引用
※3 英国ZiFiSense社が開発した、超狭帯域(UNB: Ultra Narrow Band)による多チャンネルでの通信、メッシュネットワークによる広域の分散アクセス、双方向での低消費電力通信が可能といった特長を持つ、IoTに適した最新のLPWA(Low Power Wide Area)ネットワーク規格。LPWAの規格のひとつであるZETAは、中継器を多段に経由するマルチホップ形式の通信を行うことで、ほかのLPWAと比べ、基地局の設置を少なくでき、低コストでの運用が可能な方式として注目されている。