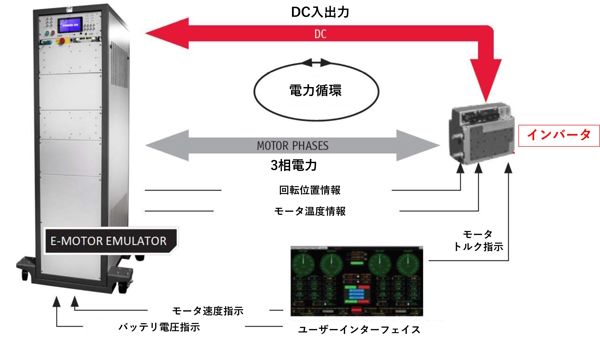
(株)東陽テクニカは、電動モビリティ開発向け評価装置のリーディングメーカーである、D&V Electronics Ltd. と、国内代理店契約を締結し、2023年1月12日に、モータエミュレータ「Electric Motor Emulator (エレクトリック モータ エミュレータ)」を発売した。
「Electric Motor Emulator」はモータの数式モデルを設定することで、モータの電気的な挙動を再現できる製品。実物のモータの用意がなくてもインバータの制御確認や信頼性・耐久性の評価を行うことができ、開発工数の削減に貢献する。
東陽テクニカは、D&V Electronics社製品の提供を通して、電気自動車や電動航空機などをはじめとした電動モビリティ開発を支援し、カーボンニュートラルの実現を目指すという。
「人の身体動作からの感情推定とキャラクタの感情豊かな動作生成 — 人間性豊かな遠隔コミュニケーションの実現に向けて」 Emotion Estimation from Human Body Movements and Generation of Emotionally Rich Movements of Characters – Toward the Realization of Humanity-rich Telecommunication(1)
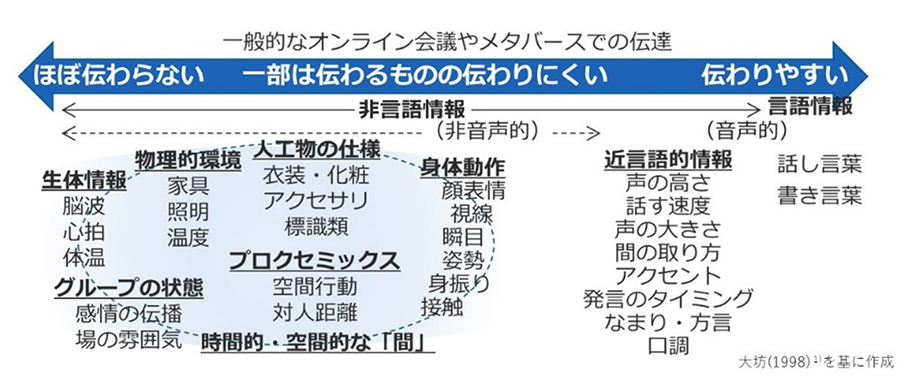
多岐に及ぶ非言語情報の中で,顔表情はカメラ映像などによって従来のオンライン会議などでも比較的伝達され易く,また,心理学の分野を中心に顔表情からの感情理解などの研究も盛んに進められており,その利用例も見かける.そういったものの中で最もよく用いられている基盤的理論は,Facial Action Coding System(顔面動作符号化システム)と呼ばれるもので,顔の動きを包括的に定量化し,Action Unit などと呼ばれる基本動作の組み合わせで様々な顔の動きをコード化し,顔の感情認識などに用いられている2).これに対して人の身体動作は,多くの重要な潜在的情報を含むにも関わらず,カメラだけでは必ずしも全てを捉えられず,表現される重要な情報が相手側に届きにくく,また顔表情に比べて研究も十分に進んでいるとは言えず3),学術的にも挑戦的な課題と言える.
2. 身体動作に注目した「動作ユニット」
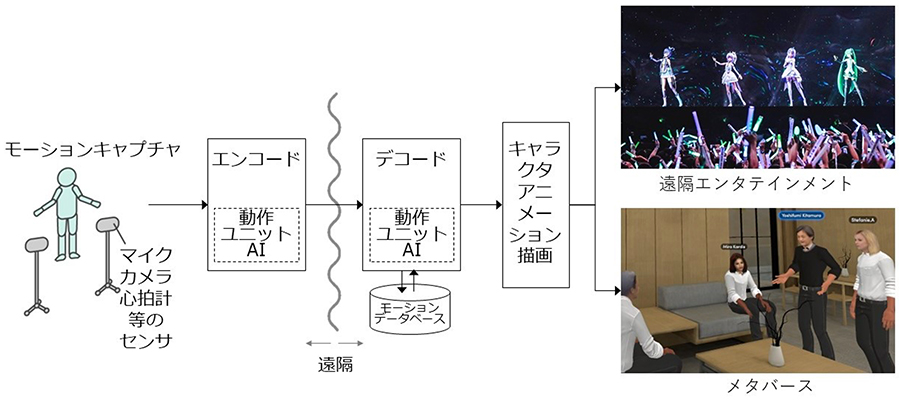
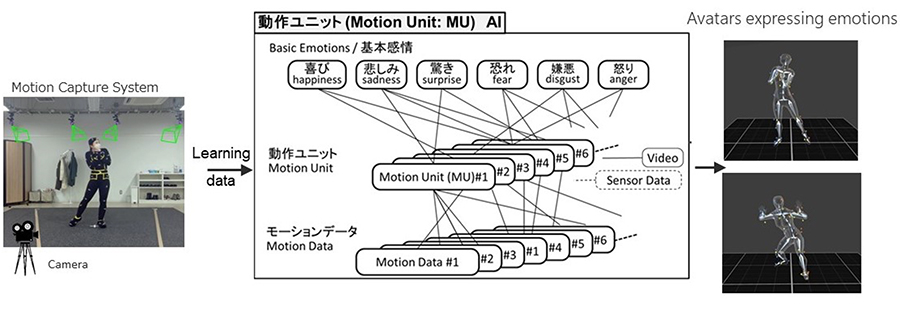
そこで我々は,「人の身体動作」に注目して研究を2021年後半から開始した.上述の顔表情理解研究におけるAction Unit に倣って,身体動作の基本部分単位を「動作ユニット(Motion Unit)」として新しく定義し,その動作ユニットの活動と感情表出の関係を対応付けたAIを作成して,アバタやキャラクタの感情豊かな動作を生成しようとする研究で,心理学やコンピュータアニメーションの分野との学際的研究として実施している.図2に示すように,人の身体動作から感情を推定し,それを基に動作をコード化して伝送し,遠隔地でデコードして取り出した動作をアバタに施せば,通信路に負担をかけることなく,通信環境の変化にロバストに,感情豊かな動作をアバタにさせることができ,豊かな遠隔コミュニケーションを実現できると考える.
図2: 動作ユニットAI の社会実装例のイメージ
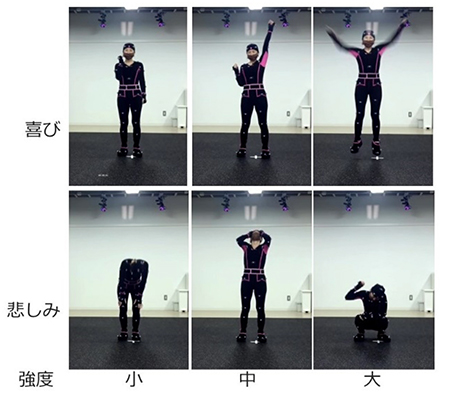
動作ユニットを定義する目的は,感情を表出する人の身体動作を客観的・体系的に記述するために必要となる関節の運動要素とその組合せを最小限のレベルで明示・リスト化することで,世界中の研究者たちが用いることのできる共通言語を作成することである.そのために,我々は現在モーションキャプチャ装置を使ってデータの取得を進めている.動作ユニットを定義する際に参考となる身体動作による感情表出についての先行研究は,The Body Action Posture coding system 4)など極めて少数に限られる.そこで,モーションキャプチャから得られる大規模データを利用して,2 段階のデータ駆動型アプローチを採用することとした.まず第1 段階では図3のように,感情表出に必要となる動作とそのための分析単位を抽出することにより,どのような感情表出にどのような身体動作が必要になるのかを見出すことができる.そして第2 段階として,表情研究における顔表情生成器のように動作ユニットを操作する身体動作生成器を構築し,どのような動作ユニットの動きの組合せがどのような感情表出に見えるのかを検証する.
Ekman, P., & Friesen, W. V: Facial action coding system (FACS): A technique for the measurement of facial action. Palo Alto, CA: Consulting Psychologists Press, 1978.
Witkower, Z. and Tracy, J. L: Bodily Communication of Emotion: Evidence for Extrafacial Behavioral Expressions and Available Coding Systems, Emotion Review, 11(2), pp.184–193, 2019. https://doi.org/10.1177/1754073917749880
Dael, N., Mortillaro, M. and Scherer, K. R: The Body Action and Posture Coding System (BAP): Development and Reliability, Journal of Nonverbal Behavior, 36(2), pp.97–121, 2012. https://doi.org/10.1007/s10919-012-0130-0
Cheng, M., Higashiyama, S., Fujiwara, K., Tseng, C. H. Kitamura, Y: E-Motion: A database of bodily Expression of basic and social emotions, iPerception (in press).