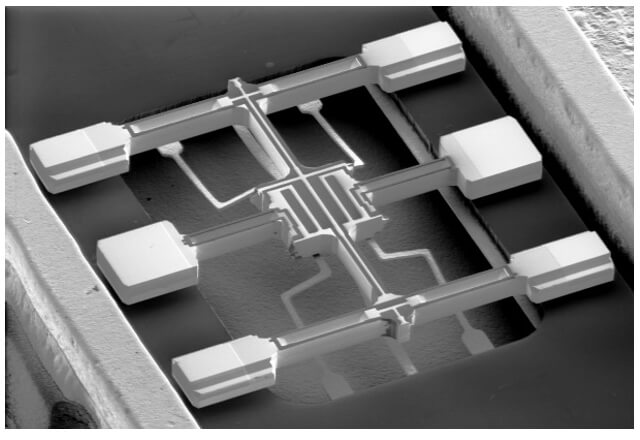
ドライエッチングとは、シリコンなどの半導体部品の製造に多く用いられている方法で、外形加工など深堀りを行うのは、反応性イオンエッチング(RIE: Reactive Ion Etching)法を用いて加工を行うことが多い。水晶やガラスなどの素材も、この技術によって加工することができる。
ドライエッチングは、ウェットエッチングのデメリットである結晶の異方性によるエッチングレートの違いを気にせず加工できることから、より設計者の意図する形状に加工しやすい。しかし、エッチングレートがウェットエッチングに比べ遅く、加工にはプラズマが必要であり、加工装置の制約上、プラズマを発生させる領域が限られているため大量に加工できないのが欠点である。水晶製品の量産技術として使われることは現状少ない。
ジャイロセンサーはこれまで様々なアプリケーションに用いられ、安全・安心で快適な社会の実現に寄与してきた。今後も小型で安価な振動ジャイロは、精度の向上によって応用範囲は広がっていくと考えている。特に近い将来、本格的な実用化が期待される自動運転技術には、高精度な自己位置推定技術が要求され、衛星測位システム(GNSS: Global Navigation Satellite Systems)と慣性センサーを組み合わせた手法は必須技術になると予測している 3,4)。ジャイロセンサーはこの統合システムにおいて、GNSSが苦手とするトンネル下や高層ビル、街路樹間の走行における相対的な位置推定の役割を担う。ジャイロセンサーのバイアス(若しくはオフセット)やドリフトは位置推定に大きな影響を及ぼすため、精度の高いものが望まれる。本稿で紹介した水晶ダブルT型ジャイロセンサーは精度が高いだけでなく、安全性の面でも車載用として多くの搭載実績があり、自動運転を実現する重要デバイスとして期待している。
参考文献
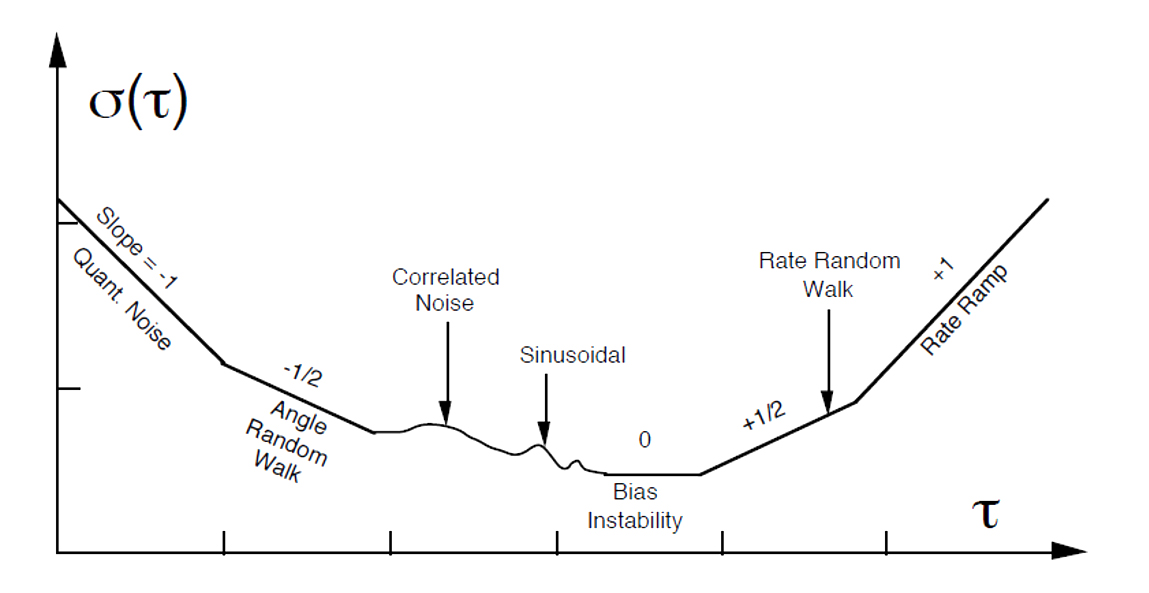
IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros, IEEE Std. 952-1997.
T.Kikuchi et al., ” Miniaturized Quartz Vibratory Gyro Sensor with Hammer-Headed Arms,” 2004 IEEE International Ultrasonics, Ferroelectrics, and Frequency Control 50th Anniversary Joint Conference, FC2-H-6, Aug.2004.







 の分散から式(3.1)の様に求める。
の分散から式(3.1)の様に求める。