東北大学
1.原子力潜水艦に使われた超高性能ジャイロ
ジュール・ヴェルヌの「海底二万マイル」に登場する潜水艦「ノーチラス号」は、陸地とは一切の交流を絶って海洋探検を行う。これが現実になったのは原子力潜水艦が登場してからであろう。潜水艦発射型弾道ミサイル「ポラリス」を搭載する「ポラリス潜水艦」は、1950年代に開発が始まり、1960年に配備された。このポラリス潜水艦は原子力潜水艦であり、仕様上は数か月の連続潜航が可能であると言われている。それには慣性航行のための超高性能のジャイロが必要とされ、イリノイ大学アーバナ・シャンペーン校のHoward Knoebel教授らのアイデアに基づいて1950年代に開発された。1) 2)
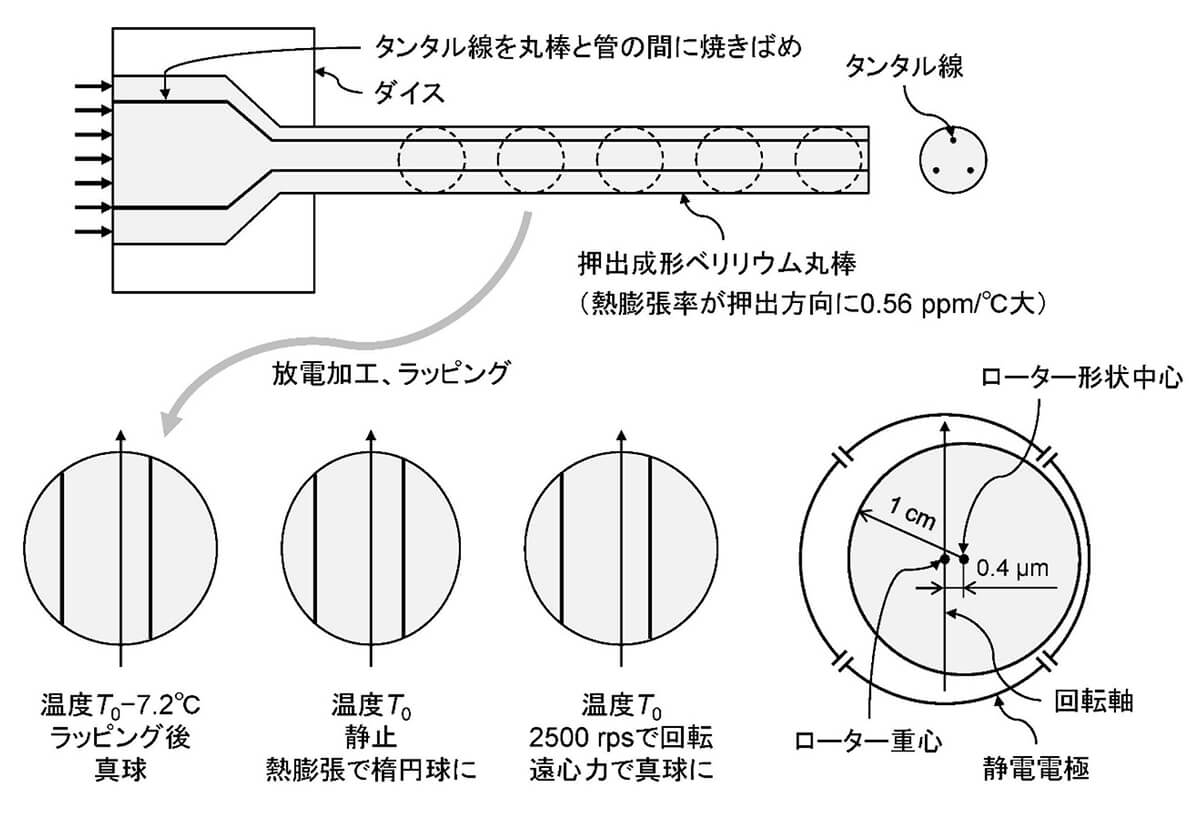
図1 ESGのローターの作り方(Dale L. McLeod, Miniaturization of The Solid Rotor Electrostatic Gyro, IEEE Proc. National Aerospace and Electronics Conference (NA ECON), Part III, 1979, pp. 1199-1205)
2.ジャイロの性能
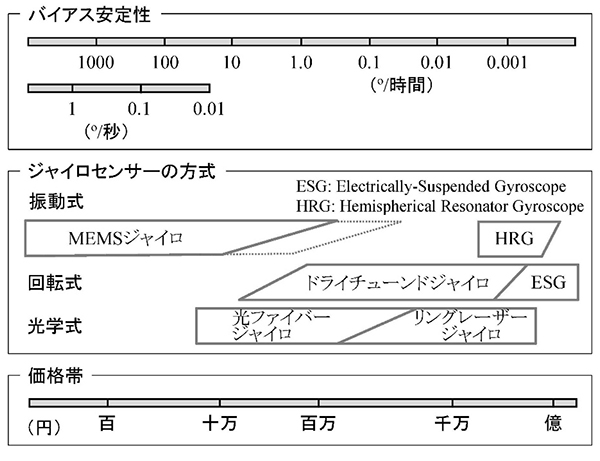
このように、当時、ありったけの技術を注ぎ込んで作ったESGは、0.0001 º/hのバイアス安定性を誇っていた。図2にジャイロの種類と性能を整理した。ここにはいくつかの種類のジャイロがバイアス安定性を横軸に取って示されているが、右側がハイエンドで、ESGは最も右側にあり、一方、左側はローエンドで、MEMSジャイロはここに位置する。ジャイロは性能にして6桁もの幅があるセンサであるが、それに応じてお値段にも1億円以上から100円以下まで幅がある。
図2 ジャイロの種類と性能
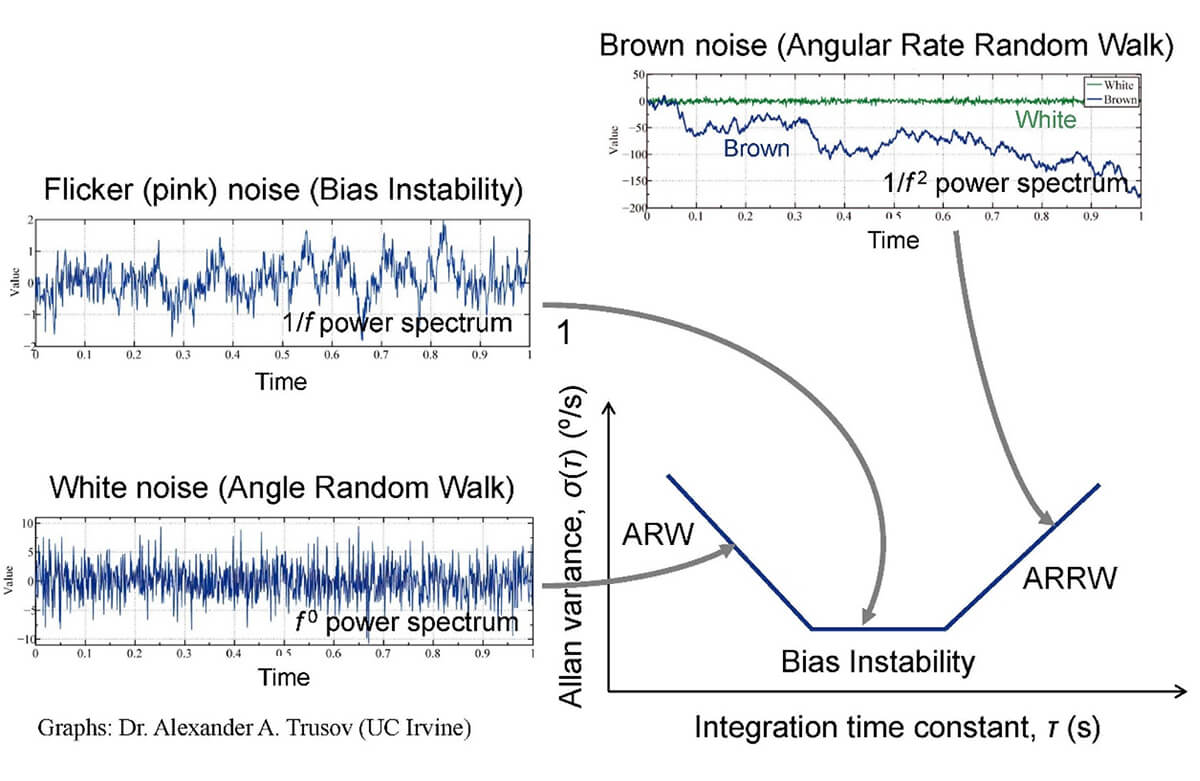
ところで、上にジャイロの性能と一口に言い、また、その指標の1つとしてバイアス安定性を挙げたものの、これには少し説明を要するだろう。ジャイロは回転を検出センサなので、どのくらいゆっくりとした回転を検出できるかが最も重要な性能になる。今、あるジャイロがどのくらいゆっくりとした回転を検出できるかテストするとしよう。ジャイロを任意の角速度で回せる装置(レートテーブル)に載せて、検出軸まわりに回転させる。ジャイロをある角速度で回して、その角速度を次第に小さくしていくと、ジャイロからの出力信号はどんどん小さくなり、やがてノイズに埋もれて判別できなくなるはずである。ここが検出限界である。
図3 レートジャイロのノイズ
3.MEMSジャイロ
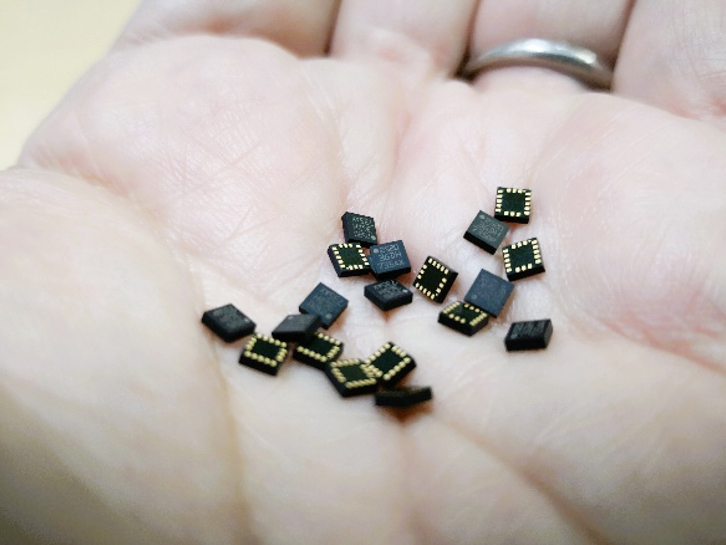
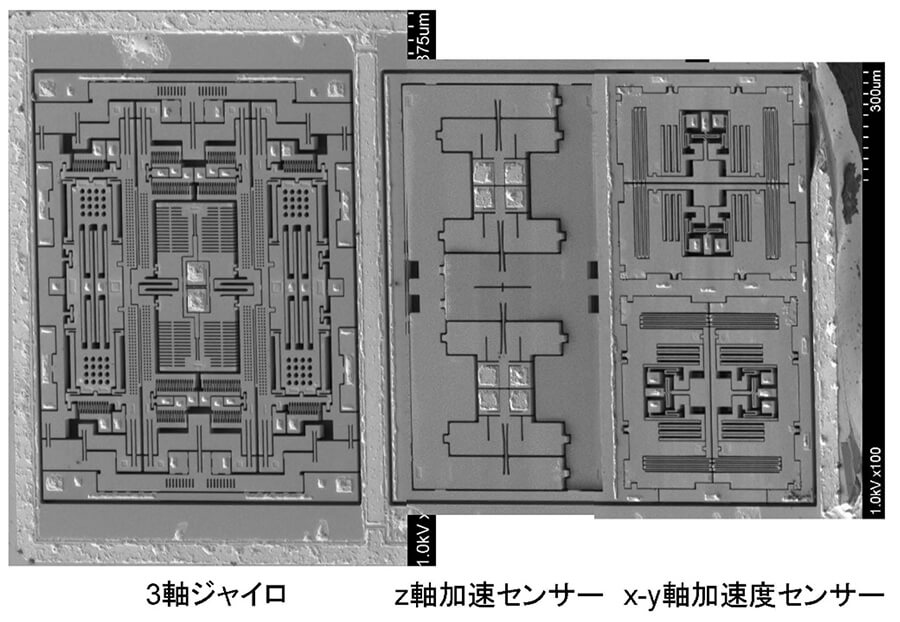
図2に様々な種類のジャイロを示したが、世の中で最も使われているのはMEMSジャイロである。その小ささ、低廉さ、使い易さなどから、スマートフォン、ゲーム機器、自動車、ドローンなど、身の回りの多くの製品にMEMSジャイロが入っている。図4にMEMSジャイロを示す。その外観(a)は典型的には樹脂モールディングされた黒い電子部品である。その樹脂モールドを除去し、さらにメカニズムを保護している蓋(ウェーハレベルパッケージ)を取ると、(b)に示すようなものが現れる。このMEMSダイ(TDK-InvenSense MPU-9250)では、右側に3軸加速度センサ、左側に3軸ジャイロが形成されおり、ジャイロの実質的な大きさは1 mm2 程度である。なお、このジャイロがどのように動作するかについては 別の記事3)
(a) MEMSジャイロの外観
(b) MEMSジャイロの内部構造(TDK-InvenSense MPU-9250、撮影:田中・塚本研究室)
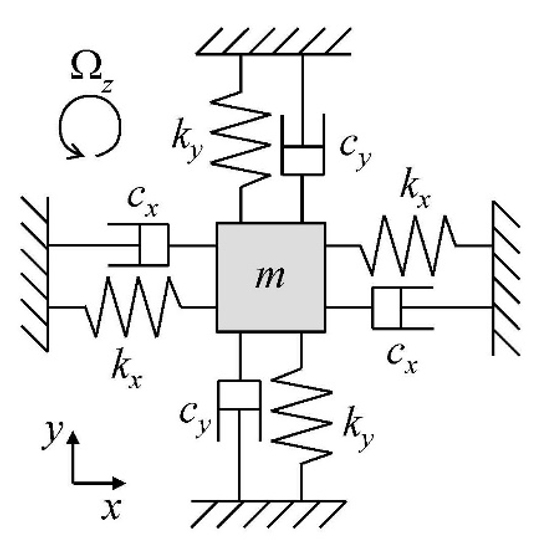
さて、MEMSジャイロは振動ジャイロの部類に属するが、図5を用いてその原理を説明する。ここで、おもり(m)が直交するx軸とy軸にばね(kx 、ky )で支持され、各方向に振動する系を考える。今、この系が静止した状態で、おもりをx方向のみに一定振幅で振動させる。y方向には力は働かないので、おもりはy方向には静止したままである。ここで、この系を角速度Ωz で面内に回転させると、この系から見ておもりにコリオリ力が働く。コリオリ力は元の振動に直交した向き、すなわちy方向で、その大きさは元の振動の速度vx とΩz に比例し、2mvx Ωz である。これによってy方向に振動が生じるが、定常状態でその振幅はΩz に比例するので、これによってΩz を測定できる。
図5 振動ジャイロの機構
ここまでの説明で納得できた人は多いと思うが、何だかおかしいと感じている人もいるだろう。y方向に静止しているおもりを加振したら、おもりに生じる振動は、減衰自由振動と強制振動の足し合わせたものになるはずで、Ωz に振幅が比例するのは後者だけのはず…そのように思った方は機械力学を学んだ方だ。おもりの振動が後者だけになるには、前者が十分に減衰するのを待たなくてはならない。しかし、これでは刻々と変わる角速度を測ることはできないため、実用的とは言えない。x とfy を少しだけ違えておく。x方向に共振周波数fx で振動させると、y方向に生じる減衰自由振動の周波数はfy であり(実際には少し違うが、MEMSジャイロでは減衰係数が小さいので、ほぼ正しい)、一方、強制振動の周波数はfx であるから、後者の周波数成分だけ取り出せばよい。これはx方向の駆動信号を用いて同期検波すれば、可能である。こうやって復調された信号には、DC、|fy −fx |、|fy +fx |などの周波数成分が含まれるが、今、欲しい周波数成分はDCなので、|fy −fx |以上の成分をローパスフィルターでカットする。この方法は単純であるものの、|fy −fx |以上の角速度変化は測定できない、つまりバンド幅が|fy −fx |以下に限られるという欠点を持つ。
次回に続く-
【著者紹介】 田中 秀治(たなか しゅうじ)
■略歴
1999年3月 東京大学大学院工学系研究科産業機械工学専攻博士課程修了。博士(工学)。 1999年4月 東北大学大学院工学研究科助手。 2001年4月 同講師。 2003年4月~2013年7月 同助教授。 2013年8月 同教授。 2004年1月~2006年3月 科学技術振興機構研究開発戦略センターフェロー(兼務)。 2006年4月~2018年3月 同特任フェロー。 2017年度 日本機械学会マイクロ・ナノ工学部門 部門長。
IEEE Fellow、日本機械学会フェロー。
(公財)レーザー技術総合研究所
1.はじめに
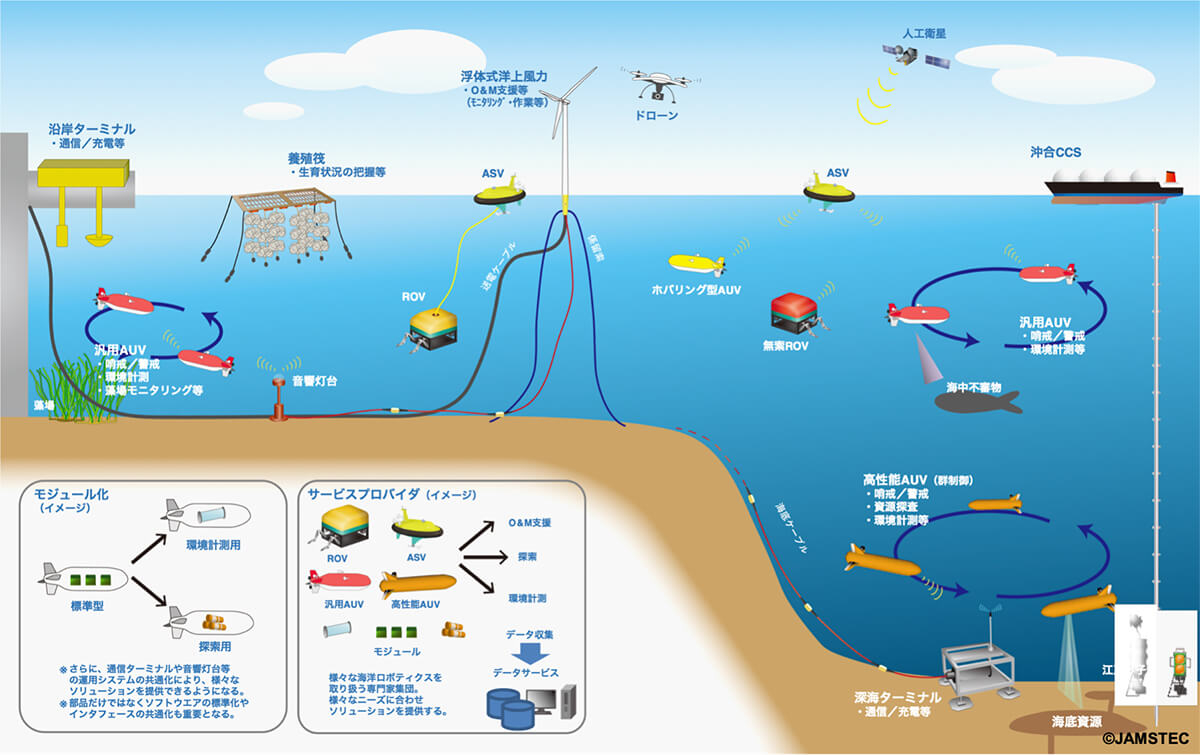
日本の領海・排他的経済水域は国土面積の12倍程度も大きく、海底鉱物・エネルギー資源の採掘、CO2 の大規模削減を目指すCCS(Carbon dioxide Capture and Storage)、海底パイプラインなど、有効な海底利用が期待されている。海底開発では資源探査手法の開発だけでなく、海底インフラのメンテナンスや事故の早期発見、開発に伴う海洋生態系・環境への影響評価が重要とされている。現状の採取・採水測定による海中環境の評価は、頻度や評価可能なエリアに限度があるため、広範囲な領域を短時間でモニタリングが可能な水中ライダーを提案している。(1) 。レーダーでは雨粒などの測距だけでなく、偏波・ドップラー効果といった電磁波の特性を利用することによって、降水粒子の識別(雨、雪など)や風の観測など、付加情報を生み出している。一方、レーザーを利用すると、その高い電場強度によってレーダーでは観測されない蛍光、ラマン散乱なども観測することが可能となる。先の降雨の例で言えば、雲を形成する前の水蒸気の状態から観測が可能となるため、この情報を利用した気象予測モデルの精度向上が検討されている(2) 。
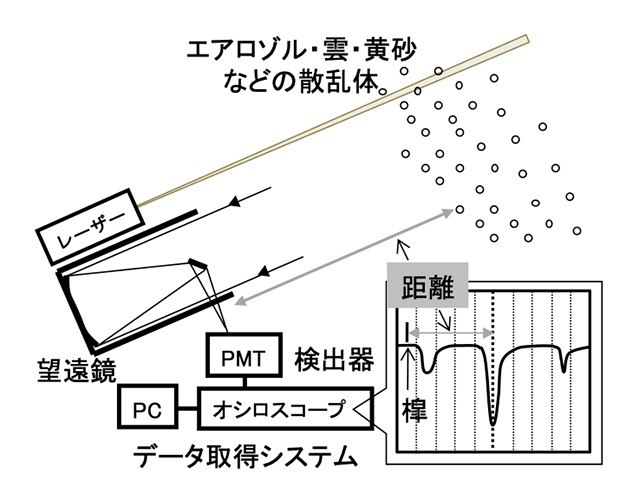
図1 ライダー装置の概念図
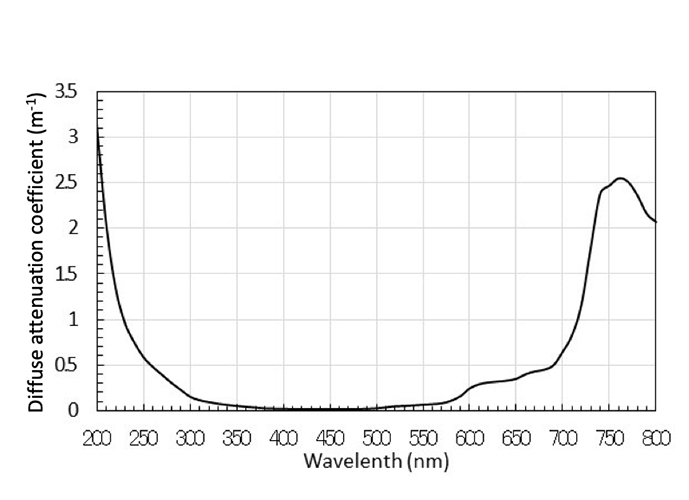
図2 水の減衰係数
ライダーでは、パルスレーザーを照射し、測定対象との相互作用を望遠鏡などで受信するのが一般的な装置構成である(図1)。送信レーザーのトリガー信号(T)に対する散乱信号などの時間遅れを距離に換算することで、測定対象の距離情報の取得が可能になる。この光の飛行時間を測定する方式がTime Of Flight(TOF)方式である。大気中であれば数kmに及ぶ測定対象の高度分布情報を取得することが可能であり、様々な環境計測で測定が実施されてきたが(1) 、水中への応用となると海底地形の把握程度で応用例が格段に減少する(3) 。これは、光が水を通り抜けにくいことが原因の一つであろう。水は光の吸収体としてよく知られてはいるが、図2に深紫外から近赤外領域の水の減衰係数(透過特性)を示すように(4) 、紫外から青、緑の波長領域の光は透過特性が良い。そこで、これらの透過特性の良い波長のレーザーを利用して、測距だけでなく水中の成分分析まで可能なライダーの利点を活かした、水中ラマンライダーの開発を実施している(5)-(13) 。
2.ラマンライダーによる水中モニタリングの可能性
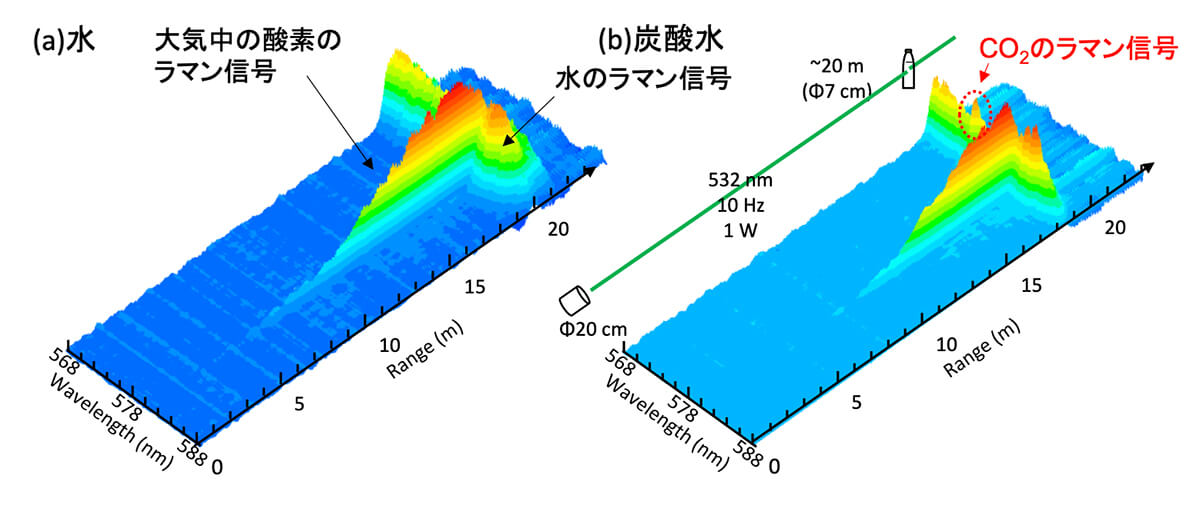
ライダーで水蒸気などのガスを測定しようと考えると、一般的に吸収とラマン散乱計測の2通りのアプローチがある。吸収は、ppmのオーダー程度の微量濃度評価が可能な手法であるが、図2に示したように水の透過領域で対象ガスの吸収ラインが都合良く存在しないため水中計測に利用することはほぼできない。一方で、ラマン散乱は現象自体が微弱であり、微量分析には不向きという欠点はあるが、使用するレーザー波長に制限がないため、水の透過が良いレーザーを利用すれば導入は容易である。水の透過領域である紫外~緑色の波長領域では、大気中のラマンライダーでも良く利用される波長532、355 nmで高パルスエネルギーであるNd:YAGレーザーが豊富にある。そこで、水に溶けているCO2 ガスとして、市販の炭酸水の瓶を20 m先に設置して、ラマンライダーによって瓶の中のCO2 ガスが見えるのかを確認した。
図3 ラマンライダーによる炭酸水の識別
図3がラマンライダーによる炭酸水の識別試験の結果である(5) 。(a)が炭酸水と同じ瓶にいれた蒸留水、(b)が炭酸水の観測結果である。~583 nmに見られるのが水のラマン信号であり、水・炭酸水の両方に観測されている。それに加えて炭酸水からは~574.3 nmのCO2 のラマン信号が観測されている。この実験では、水中にあるCO2 ガスではなく、大気中に設置した炭酸水の瓶を観測しているため、~579.9 nmに大気成分である酸素のラマン信号も測定されている。このようにラマンライダーを利用すれば、1台の水中ライダーシステムで複数ガスや油の同時モニタリングが可能になり、海底開発に伴う環境影響評価などに対して効率的な水中モニタリングが期待できる。図3に示した水に溶けているCO2 ガスだけでなく、気泡状態での定量分析手法の検討や(6) 、海水に含まれる成分の干渉がないことも確認し(7) 、本手法の海中モニタリングへの適用可能性を検証するために海上ラマンライダー観測を実施した(8)-(10) 。
次回に続く-
参考文献
C. Weitkamp: ed., Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere, Springer (2005)
染川智弘, 佐藤悠, 高橋真弘, 高田望, 藤田雅之 : 日本リモートセンシング学会誌, 3, 360 (2013)
J. L. Irish and T. E. White : Coastal Eng. 35, 47 (1998)
R. C. Smith and K. S. Baker : Appl. Opt. 20, 177 (1981)
T. Somekawa, A. Tani, and M. Fujita: Appl. Phys. Express, 4, 112401 (2011)
T. Somekawa, T. Takeuchi, C. Yamanaka, and M. Fujita: Proc. of SPIE, 9240, 92400J (2014)
T. Somekawa and M. Fujtia: EPJ Web of Conference, 119, 25017 (2016)
T. Somekawa and M. Fujita, EPJ Web of Conferences, 176, 0102 (2017)
T. Somekawa, S. Kurahashi, J. Kawanaka, and M. Fujita, Proc. SPIE, 10791, 1079104 (2018)
染川智弘:レーザー研究,48,599 (2020).
T. Somekawa, J. Izawa, M. Fujita, J. Kawanaka, and H. Kuze, Opt. Commun. 480, 126508 (2021).
T. Somekawa, J. Izawa, M. Fujita, J. Kawanaka, and H. Kuze, Appl. Opt., 60, 7772, 2021.
T. Somekawa, S. Kurahashi, S. Matsuda, A. Yogo, and H. Kuze, Opt. Lett., 48, 5340 (2023).
【著者紹介】 染川 智弘(そめかわ としひろ)
■略歴
2008年3月 大阪大学大学院理学研究科宇宙地球科学専攻 博士(理学) 2008年4月~ 公益財団法人レーザー技術総合研究所 入所 研究員、副主任研究員、上席研究員を経て現在、主任研究員 2023年4月~ 大阪大学レーザー科学研究所 招へい教授
東京海洋大学
1.はじめに
海洋は地球環境変動に大きく関与しており、地球環境の現状把握や将来予測のためには海洋の広範囲にわたる生物地球化学的な観測を実施し、海洋の役割を理解する必要がある。人工衛星や航空機を使ったリモートセンシングは、広範囲に観測データを取得することが可能であるが、海洋のごく表層での数種類の測定項目に限定され、データの取得は気象条件に左右される。観測船による採水・船上分析は、基本的かつ確実な手法であるが、海洋の広い範囲で水柱全体の鉛直連続観測や長期間連続観測は不可能である。さらに海洋の化学成分分析・解析は、専門技術・知識を持った「職人技の世界」であり、取得できるデータ数が制限されてきたことは否めない。
2.化学センサによる現場計測
海洋科学の研究で海水の直接計測に利用されているセンサとしてはCTDが最も一般的である。CTDは電気伝導度(Conductivity)・水温(Temperature)・深度(Depth)を同時に連続的に測定するためのセンサパッケージであり、透過度計(あるいは濁度計)、蛍光光度計、光量子計、溶存酸素計などのセンサもCTDと組み合わせて利用されている。CTDセンサパッケージは多筒採水システムと組み合わせて観測船上からの鉛直連続計測が行われているが、前述のように、この方法では観測できる測点数に限界がある。
3. 現場型pH/pCO2 /ORPセンサ
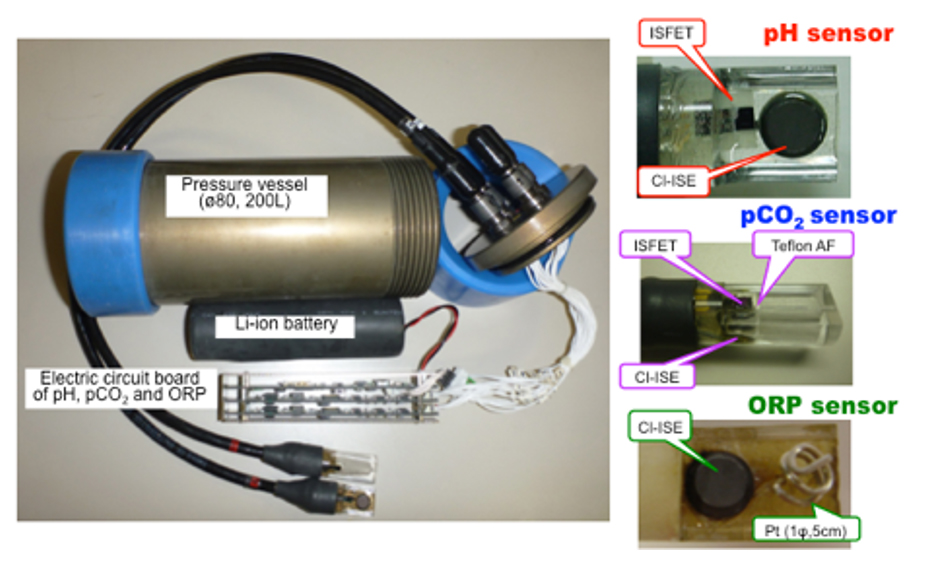
大気中のCO2 濃度上昇に伴う海洋の炭素循環メカニズムの解明や海洋酸性化のモニタリング、新規海底熱水活動域(熱水鉱床)の探査、CCS(CO2 回収・貯留)における貯留CO2 の漏洩検知や海洋への拡散・挙動モニタリングなどに関連して、海洋の表層から深海まで、海洋中のpHと二酸化炭素分圧(pCO2 )の高精度な連続計測や長期計測へのニーズが高まっている。2 、酸化還元電位(ORP)を高精度に同時計測するための現場型センサを開発し1),2) 、深海を含む種々の海域において現場計測を行ってきた。図1に現場型pH/pCO2 /ORPセンサを示す。pHセンサは、pH電極としてイオン選択性電界効果型トランジスタ(ISFET)を、参照電極として塩化物イオン選択性電極(Cl-ISE)が用いられている。pCO2 センサは、この現場型pHセンサの電極部を内部液で満たしたガス透過膜で封止しており、海水中のCO2 がガス透過膜を透過して内部液のpHを変化させることでpCO2 を計測する。ORPセンサは、作用電極として白金を、参照電極としてCl-ISEが用いられている。これらのセンサに用いられている電極は全て固体電極であるため、耐圧性や耐衝撃性が高く、計測においては応答時間が1秒以下と極めて短いため、移動する海洋観測プラットフォームへの搭載に最適である。
図1 現場型pH/pCO2 /ORPセンサ
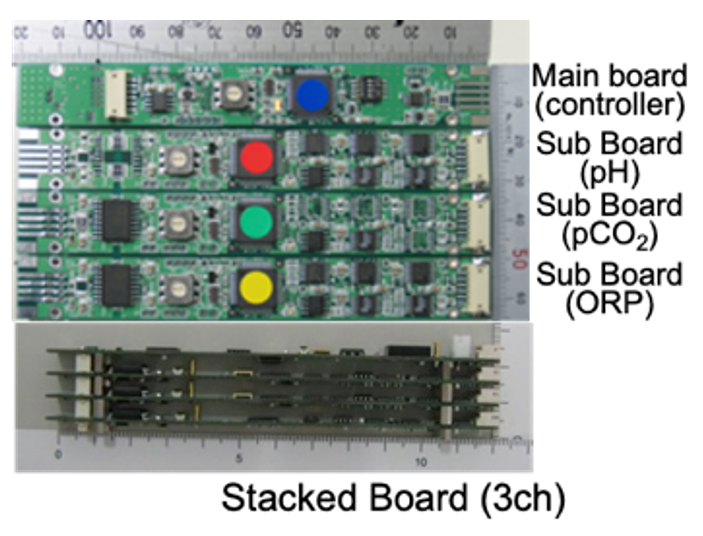
海洋観測プラットフォーム等への搭載に際し、電子回路基板の小型・省電力化とマルチチャンネル化が必要であった。図2は小型・省電力化した電子回路基板である。開発当初の電子回路基板ではデータロガー基板とサブ基板(ISFET-pH電極あるいはORP電極の制御)の組み合わせで1成分の計測であったが、この電子回路基板では、小型・高性能化した1枚のメイン基板(サブ基板の制御とデータロガ)と3枚のサブ基板(ISFET-pH電極とORP電極の制御)を組み合わせてマルチチャンネル化し、3成分(pH/pCO2 /ORP)の同時計測を可能とした。また、この電子回路基板は、1枚のメイン基板に対して最大で16枚のサブ基板が接続できる。
図2 小型マルチチャンネル電子回路基板
次回に続く-
参考文献
下島公紀,許正憲: 化学センサの海洋学への適用 −ISFETを用いた深海用pHセンサの開発−, 地球化学, 32, 1-11 (1998).
Shitashima, K., Kyo, M., Koike Y. and Henmi. H. “Development of in-situ pH sensor using ISFET”, Proceedings of the 2002 International Symposium on Underwater Technology. IEEE/02EX556, 106-108 (2002).
【著者紹介】 下島 公紀(したしま きみのり)
■略歴
1989年3月 広島大学大学院生物圏科学研究科博士課程後期修了 学術博士 1989年4月 日本学術振興会特別研究員(東京大学海洋研究所) 1990年8月 (財)電力中央研究所 我孫子研究所 研究員 2006年7月 (財)電力中央研究所 環境科学研究所 上席研究員 2011年6月 九州大学 世界トップレベル研究拠点カーボンニュートラル・エネルギー国際研究所 CO2 貯留研究部門 准教授 2016年4月 東京海洋大学 大学改革準備室 教授 2017年4月 東京海洋大学 海洋資源エネルギー学部門 教授
■受賞歴
東京大学 名誉教授
1. ソーナーを使用したシールドマシンのトンネル掘進作業支援技術開発
シールドマシン作業の音響支援を通じて、工事に起因した地盤の沈下などに配慮して、施工工事における安全管理技術の一環として実施した。
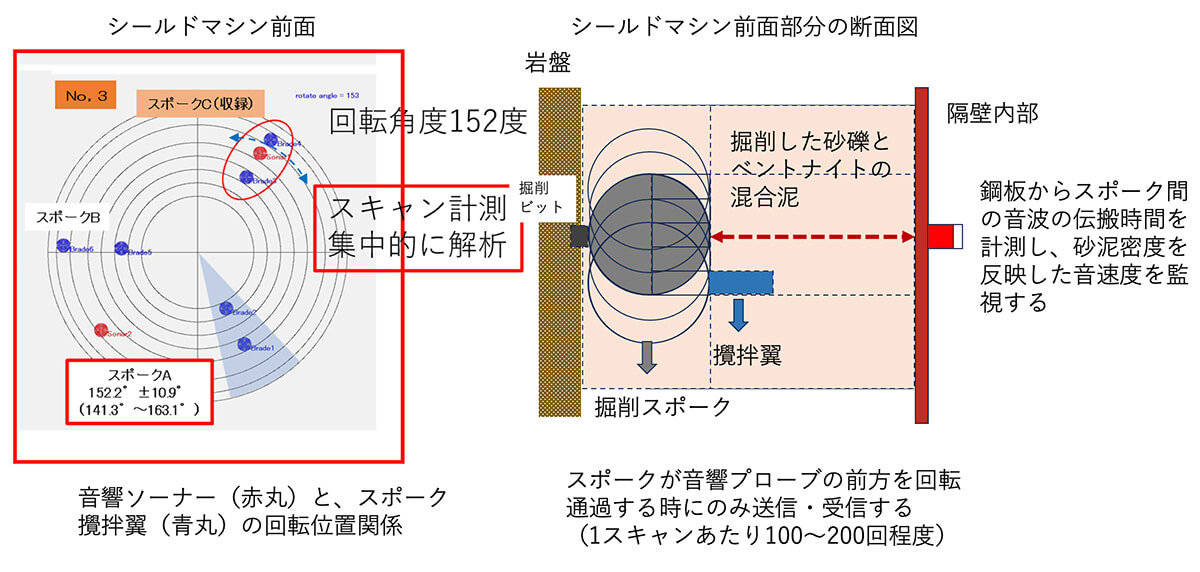
図1 シールドマシン装備の音響ソーナーと回転する掘削スポークの配置
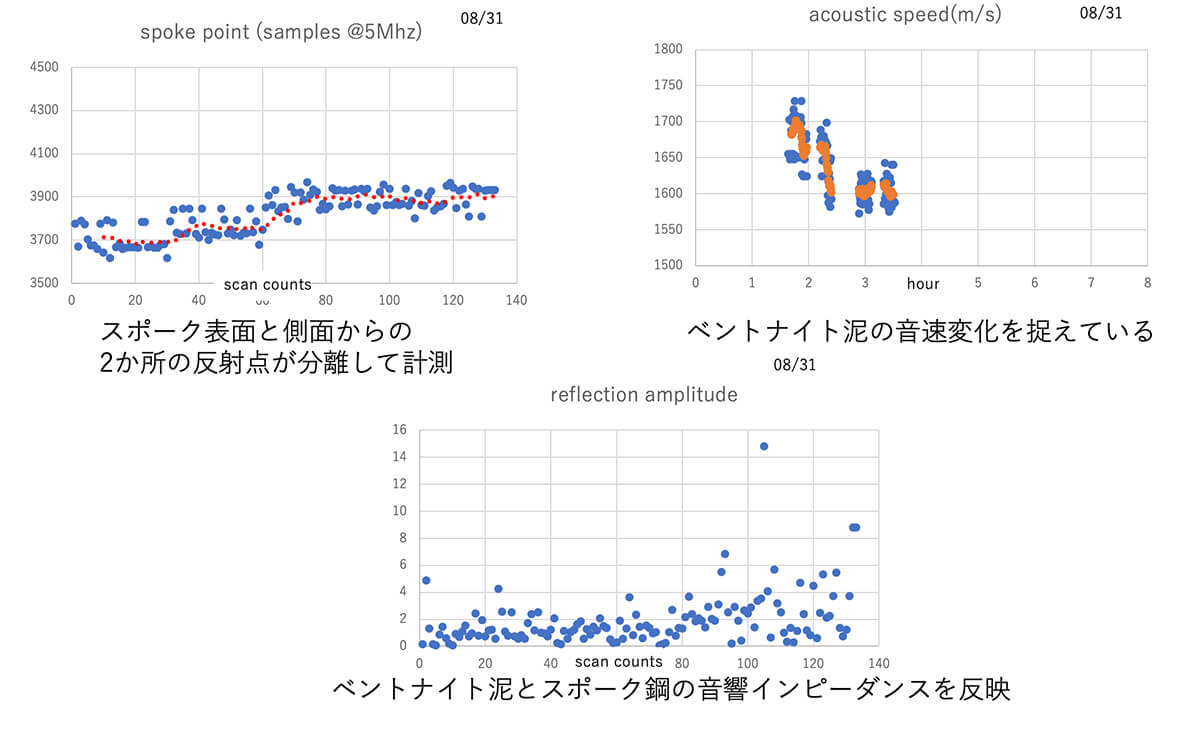
図2 スポーク反射点の検出位置、音速度、反射音響強度
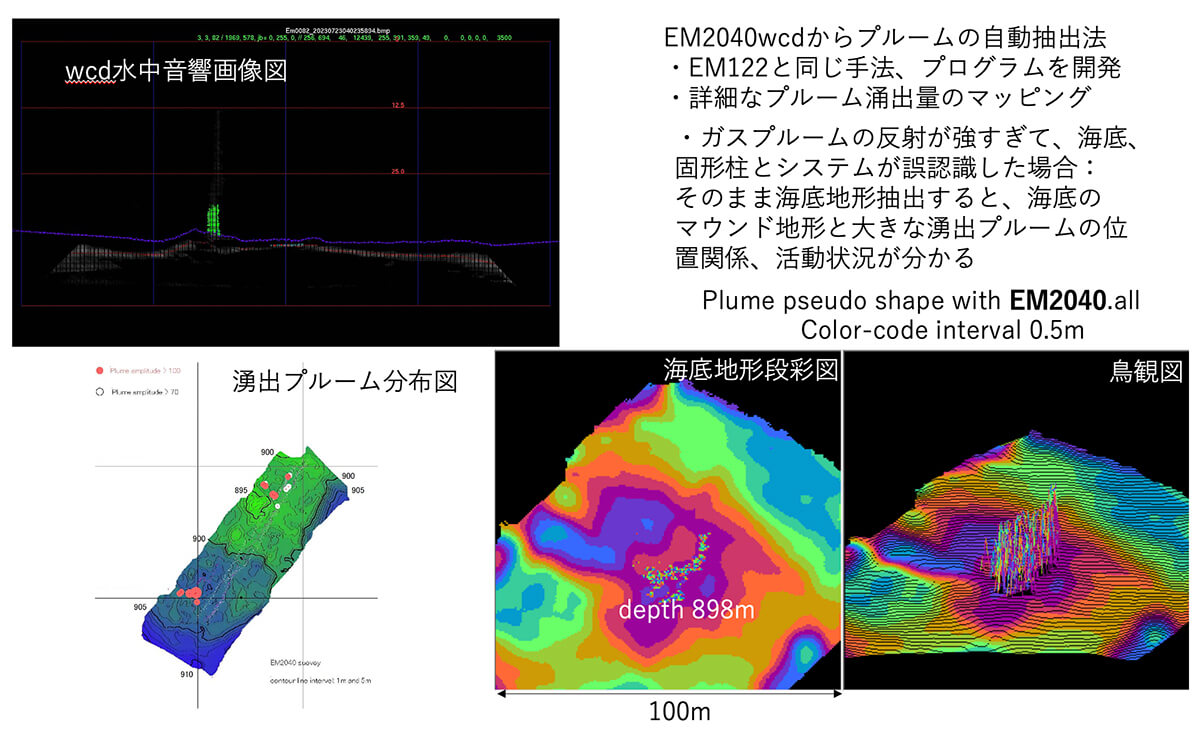
2.海鷹海脚のメタンプルーム湧出量の定量観測手法開発と実用化
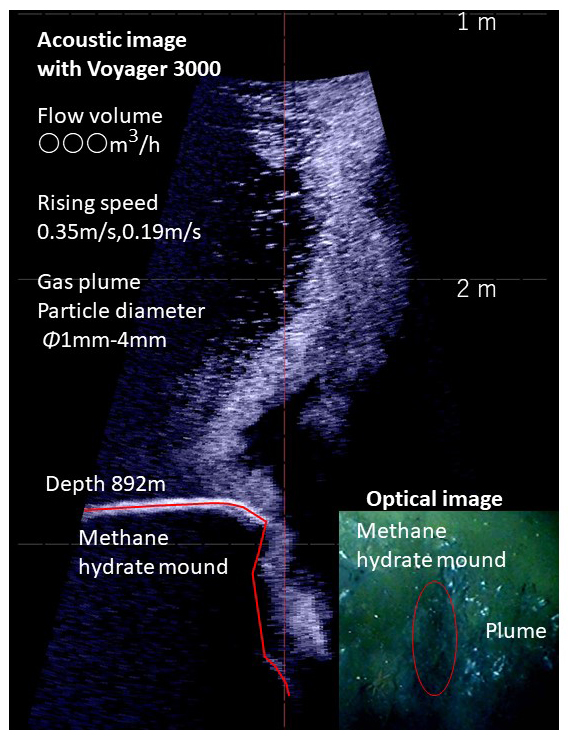
音響ビデオカメラVoyager3000とガスサンプラーの2つの定量計測
EM2040wcd(water column display) による各サイト湧出ポイントと湧出量の計測
REOPARD ROV作業により独自製作ガスサンプラー8㍑計量容器を湧出口に被せて、5分から30分の湧出量の計量を行い、正確な湧出量を計測した。重要な参照値として位置づけられる。
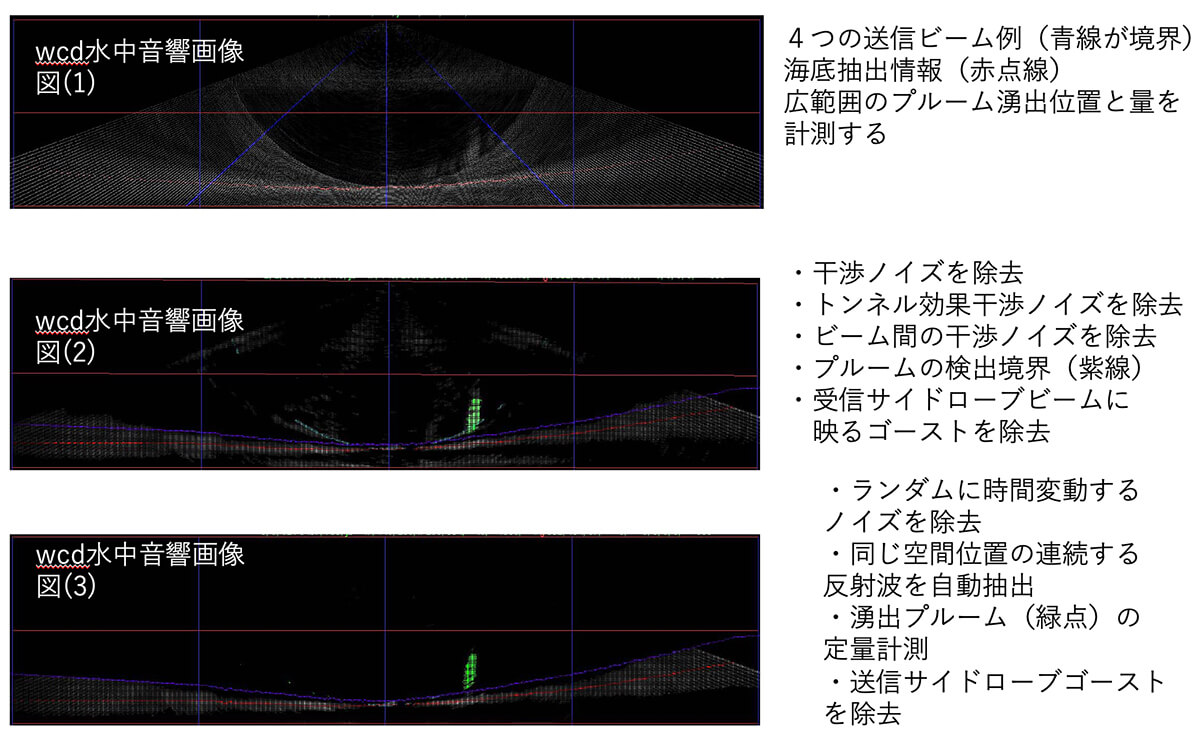
EM122wcd海鷹海脚全体の湧出量を音響反射強度から定量計測し、湧出活動の時空間変動の関係を把握した。EM2040wcd及びEM122wcd計測原画像から、送信ビームのセクター、海底検出情報を、音響画像情報に重畳し広範囲のプルーム湧出位置と量を計測する。次に、干渉ノイズを除去、トンネル効果干渉ノイズを除去、ビーム間の干渉ノイズを除去、プルームの海底直上の検出境界下限を設け、的確にプルームの反射強度を抽出する。さらに、受信サイドローブビームに映るゴーストを自動除去し、ランダムに時間変動するノイズを除去、同じ空間位置の連続する反射波を自動抽出することにより正確性を向上した。
図3 Voyager3000による計測結果
図4 EM2040wcdの計測、解析結果
図5 EM122wcd, EM2040wcd水中音響映像情報の定量解析機能
次回に続く-
【著者紹介】 浅田 昭(あさだ あきら)
■略歴
昭和52年3月 早稲田大学工学部電気工学卒業 平成7年10月 東京大学理学博士授与 昭和54年4月 海上保安庁海洋情報部入庁 平成12年4月 東京大学生産技術研究所教授 平成25年4月 東京大学生産技術研究所海中工学国際研究センター長 平成31年3月 定年退職 令和元年6月 東京大学名誉教授
学会活動:





 の割合で減っていくものの、あるところで下げ止まり、それ以上にτを長くすると、かえって誤差が増えること表している。その底の部分がバイアス安定性に相当する(正確には、バイアス安定性の1/0.664倍)。センサ等を取り扱った経験があれば、図3の左側のスロープはホワイトノイズ、右側のスロープはブラウンノイズ、真ん中の平らな部分はフリッカノイズやピンクノイズなどと呼ばれることをご存じだろう。
の割合で減っていくものの、あるところで下げ止まり、それ以上にτを長くすると、かえって誤差が増えること表している。その底の部分がバイアス安定性に相当する(正確には、バイアス安定性の1/0.664倍)。センサ等を取り扱った経験があれば、図3の左側のスロープはホワイトノイズ、右側のスロープはブラウンノイズ、真ん中の平らな部分はフリッカノイズやピンクノイズなどと呼ばれることをご存じだろう。