レシーバICのSTWLC38は、Qi 1.3準拠の15W EPP(Extended Power Profile)および5W BPP(Baseline Power Profile)をサポート。5Wのトランスミッタとしても使えるため、機器間の充電において給電もできる。同期整流器と低ドロップアウト(LDO)リニア・レギュレータを集積しているため、受信コイルから電力を4V~12Vでプログラム可能なDC出力電圧に85%の変換効率で変換する。STの適応型整流設定(ARC)モードにより、使用可能な充電面積を最大化し、受信器の検出距離を50%延長可能。また、空間的な自由度が向上するため、機器を最適な給電位置にセットできるようになる。
[1] Train ridership rising in Jakarta, as people seek to escape traffic jams, The Straits Times, July 2023
https://www.straitstimes.com/multimedia/graphics/2023/07/jakarta-traffic-jams/index.html
Ikuo Yamamoto,Practical Robotics and Mechatronics,IET (The Institution of Engineering and Technology, UK),Control,Robotics and Sensors Series 99,ISBN978-1-84919-968-1(2016)
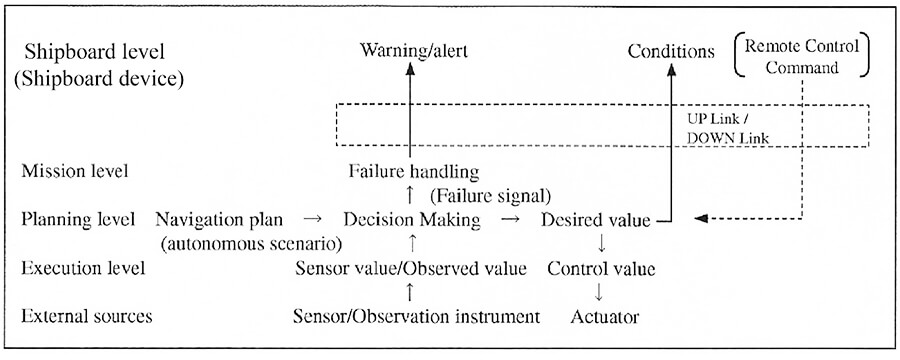
Ikuo Yamamoto, Design of Agent-Net Based Control System of Marine System, Proc. IFAC MCMC, A-3, No.3, pp.1-6, 2006
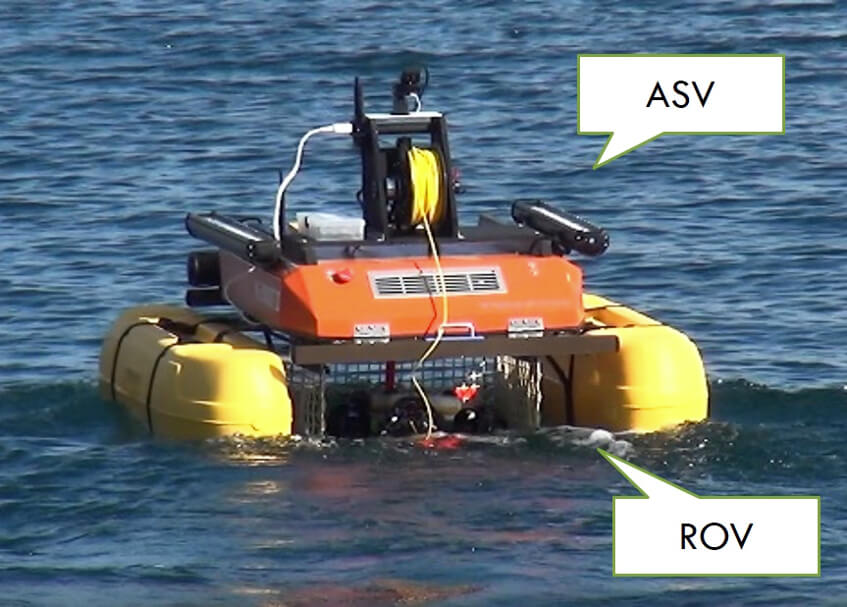
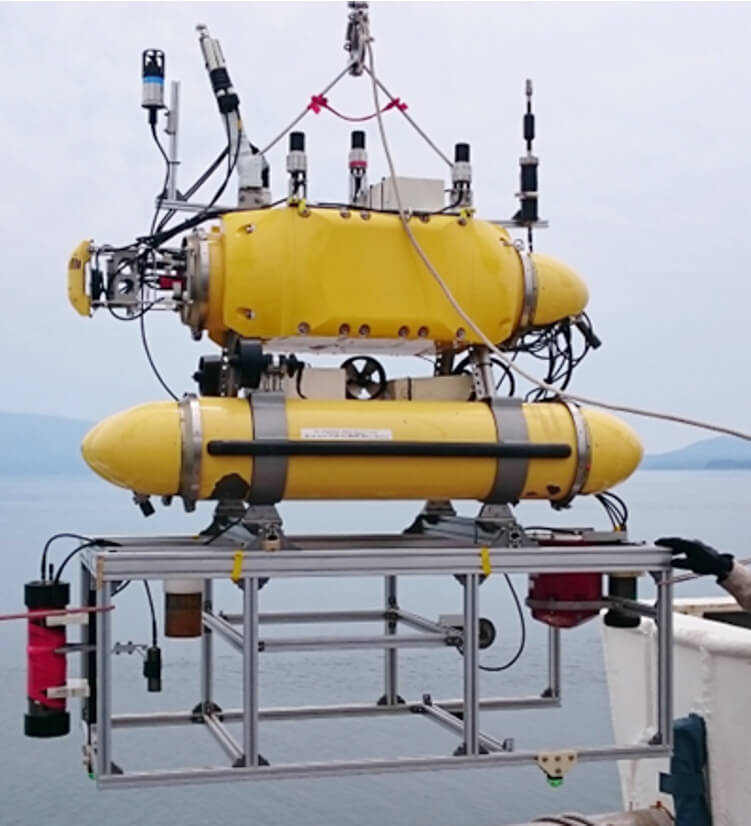
Ikuo Yamamoto, Akihiro Morinaga and Yasunori Izumi, Development of ASV/ROV joint mobility vehicle for ocean investigation, Proceedings of the Thirty-third (2023) International Ocean and Polar Engineering Conference, Ottawa, Canada, June 19-23, 2023, ISBN 978-1-880653-80-7; ISSN 1098-6189, pp.1130-1134, Jun., 2023
T. Maki, Y. Sato, T. Matsuda, A. Kume, T. Sakamaki, and T. Ura, “AUV Tri-TON-A hover-capable platform for 3D visualization of complicated surfaces,” Underwater Technology Symposium (UT), pp.1–6, 2013.
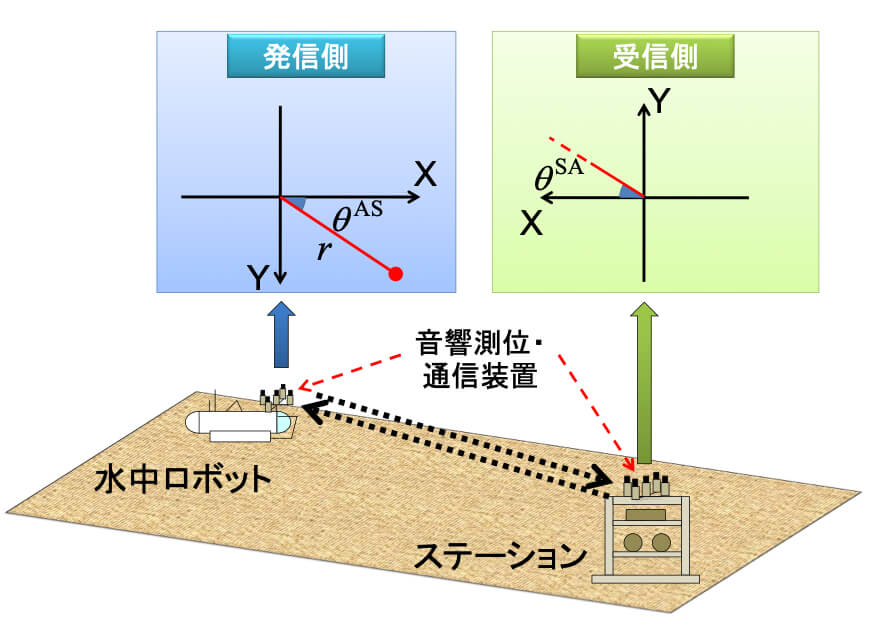
T. Maki, T. Matsuda, T. Sakamaki, T. Ura, and J. Kojima, “Navigation Method for Underwater Vehicles Based on Mutual Acoustical Positioning With a Single Seafloor Station,” IEEE Journal of Oceanic Engineering, 38(1), pp.167-177, 2013
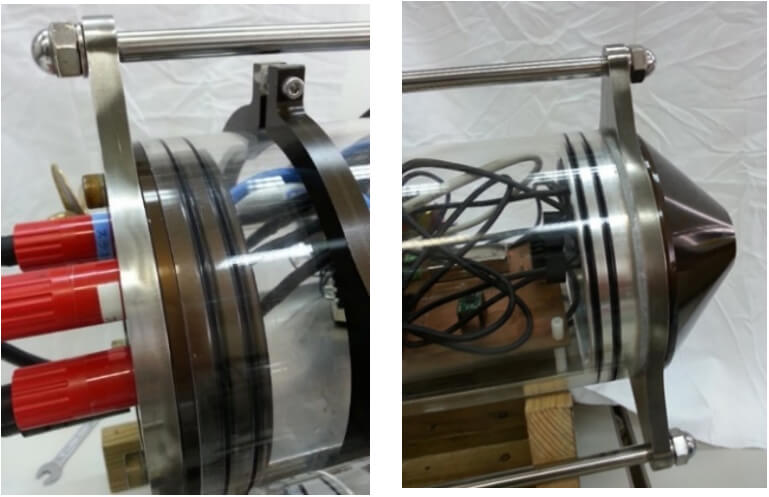
① 蓋部分の防水対策について
Oリングを2つ用いて図5に示すように設置する。さらにグリスをアクリルパイプとOリング周辺に使うことで密封性を高めた。合わせて、前後の蓋にはステンレスの板を取り付け、シャフトを通して面接触になるようボルトで固定することにより稼働中に蓋が外れて浸水することを防いでいる。メンテナンスを考えアルミ蓋には、空気抜き用シールプラグの穴を設けている。
図6.蓋部分の防水
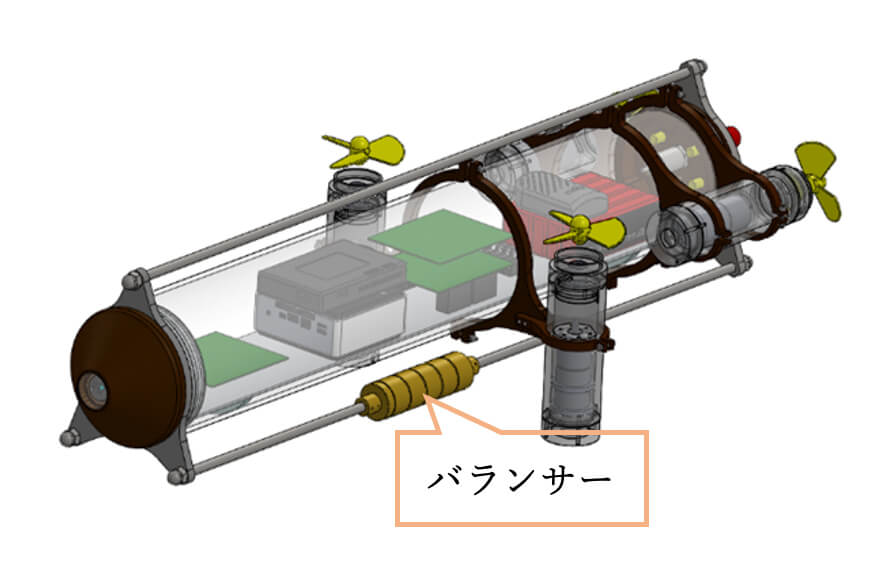
② スラスタ
スラスタは、スクリューシャフトに軸ぶれ防止用にカップリングとベアリングを使用して軸の安定化させた。カップリングにはスリット型を使用し、オイルシールとベアリングの空間にはグリスを注入して防水効果を高めている。動力は、DCモーター駆動で12V(トルク167mN-m)を使用している。