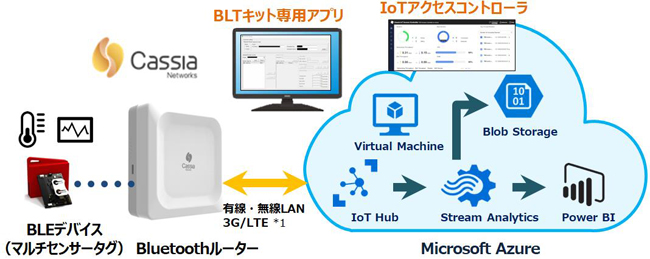
東京エレクトロン デバイス株式会社(横浜市神奈川区、代表取締役社長:徳重 敦之 以下、TED)は、長距離Bluetooth Low Energy(BLE)通信、複数BLEデバイスの同時接続とセンサー情報の見える化を低コスト、省電力で簡単に実現する「Cassia BLT(Bluetooth Long range IoT)キット for Azure」を2018年10月2日より販売する。
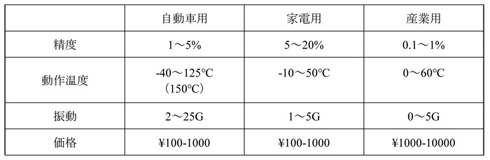
自動車用センサは家電用や産業用と比較して使用環境が飛びぬけて過酷であり、また自動車用電子部品は10~20年という極めて長い製品寿命を要求される。これを満足させるために長期の信頼性試験を行うことが自動車用センサ開発の大きな課題となっている。最近のセンサの傾向として、メカ部のMEMS化や信号処理LSI内蔵による高機能化といった半導体素子の占める比重が高くなっており、センサの信頼性試験も半導体の試験にセンサ固有の試験を追加するような構成となっているものが多い。自動車用半導体の信頼性試験については代表的なものとして米国における規格化の団体AEC(Automotive Electronics Counsil)が規定しているIC用の信頼性試験仕様Q100が参考になると思う。この中では対象のICをその使用温度範囲によって5つのグレードに分けて、試験内容を規定している。例えば、最も厳しい使用温度範囲-40~150℃の”grade 0″では温度サイクル試験は-50⇔150℃で2000サイクルと規定されている。特に高温環境下で使用されるセンサについては必要とされる信頼性試験期間が極めて長くなり、その開発期間(Turn Around Time)を短くすること重要な課題となっている。
さらに自動車用センサの信頼性を考える上で重要なポイントとしては、それが故障したときに電子システムに及ぼす影響を極力抑えるように構成することがある。一般に自動車用部品の開発においてはFMEA(Failure Mode and Effect Analysis)を用いて、いろいろな故障モードの影響を検討し、重大度、発生頻度、検出度の総合評価をもとにその結果を設計にフィードバックする手法が取られている。センサについてもこれらの結果により形状・ピン配置・材料などについて見直すことがある。
4) Y. Lecun, L. Bottou, Y. Bengio and P. Haffner: “Gradient-based learning applied to document recognition”, Proceedings of the IEEE, 86, 11, pp. 2278-2324(1998).
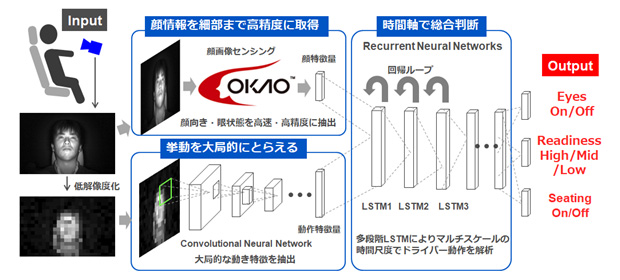
5) S. Hochreiter and J. Schmidhuber: “Long short-term memory”, Neural Computation, 9, 8, pp. 1735-1780(1997).
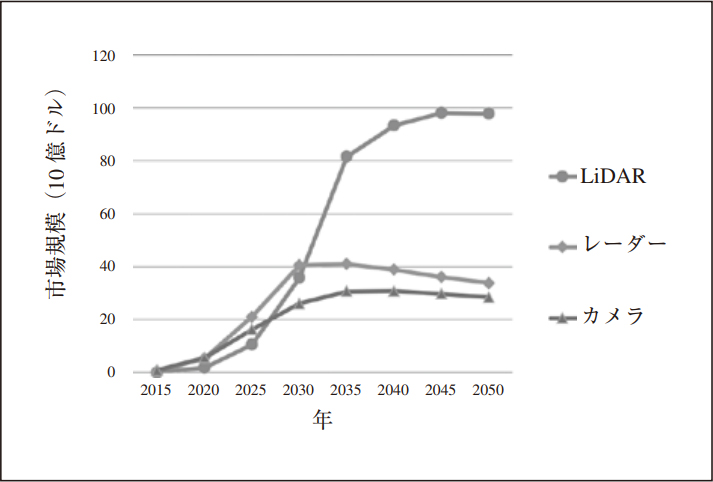
自動運転レベルに応じて,必要となるセンサーモジュールの種類及び個数は異なる。また,自動運転システムを開発しているメーカーごとに,システムの設計思想が異なっているため,必要となるセンサーの種類及び個数も異なる。例えば,Ford 社の自動運転用テスト車には,レ-ダーやカメラのほかに4 台のLiDARが搭載されている9)が,Tesla社が市販している自動運転機能搭載車には,多数のレーダーやカメラは搭載されているものの,LiDARを搭載する予定は現在のところないらしい10)。自動運転レベルに必要と推定されるセンサーモジュールの種類並びに個数に関するYOLE Development 社による市場予測の一例を表2に示す11)。なお,センサー技術は日進月歩であり,またセンサーのコストダウン率はセンサーごとに異なるので,将来に必要となるセンサーの種類及び個数は,現在想定されているものと大幅に異なる可能性があるので,この点留意する必要がある。
7) NHTSA (National Highway Traffic Safety Administration), U.S.
Department of Transportation:”Federal Automated Vehicle Policy – Accelerating the next revolution in roadway safety,” Sept. 2016.