Nortekジャパン合同会社
6 小型水中ビークルをめぐる近年の動向
海中ロボット産業において、最近では小型・超小型(マイクロ)水中ビークルが受け入れられる動きが出てきた。初期においては、Blue Robotics社の製品が小型ROV市場に登場した。現在では、より小型なマイクロAUVと呼ばれる機体や、小型の無人水上艇USV(Unmanned Surface Vehicle)が登場し、これらの市場が急速に成長している様子がうかがえる。
こうした背景には、遠隔操作または自律操作システムによって遂行される海上・水中作業の範囲を拡大したいという要求があると考えられる。各種海上・水中作業に対応できるような大型の水中ビークルには、十分な搭載能力、推進力、電源が確保されているため、様々な作業に対応できるメリットがある反面、運搬・動作にかかるコストやビークルサイズによる取り回し性能においてデメリットもある。油田・ガス開発といった業界を例に取ると、特定のタスクに特化した高性能な大型水中ビークルが依然として採用され続けている。しかし、小型、安価、遠隔操作や自律航行が可能、作業に特化した機能を持つといったような新しい小型水中ビークルは、一度に大量に水中へ投入して運用することができ、作業員の安全性確保や負荷の軽減にも役立つため、新規市場として注目されてきている。
また、小型水中ビークルの市場が注目されてきた一つの要因として、ここ数年における技術の革新によって高性能な機体の開発と製造が可能となってきたことも無視できない。例として、処理能力が向上した制御部(PC等)の出現、バッテリ技術の向上、3Dプリンティングを用いた製造プロセスによる部品の低コスト化などが挙げられる。これらの技術革新が起こる以前において開発された小型水中ビークルでは、要求される海上・水中作業に対し機能・性能が十分ではないと受け止められてきた。
7 小型水中ビークルを対象とした水中ナビゲーションの高精度化
小型水中ビークルを海上・水中作業において有効活用するためには、精度のよい水中ナビゲーションシステムを水中ビークルに搭載する必要がある。しかしながら、従来の測量等の用途で用いられるDVLは、慣性センサ類を内蔵していない種類のものが多く、単体では十分なナビゲーションシステムとして使用が難しい場合がある。また、寸法や重量が大型の水中ビークルを対象として設計されていることもあり、小型水中ビークル内に十分な搭載区画を確保できないケースもある。
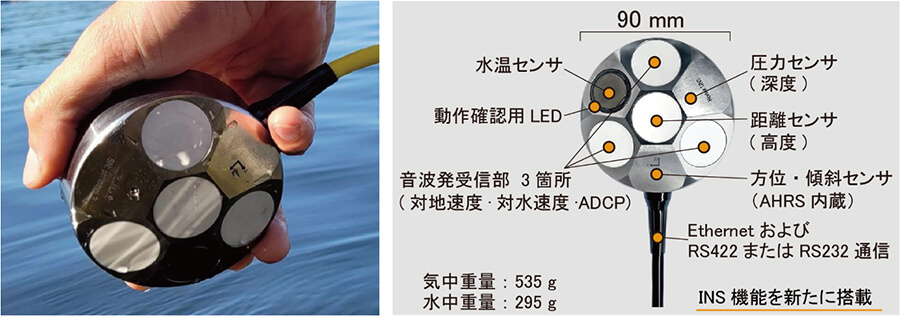
市場ニーズの高まりを受け、Nortek社では、小型水中ビークルによる高精度水中ナビゲーションの実現を目指し、同社のDVL技術をもとに慣性センサ類とDVLの一体化とその小型化を行った、「DVLセンサパッケージ」となるNucleus1000(ニュークリアス1000)を開発した。このセンサパッケージの内部には、従来のDVLが持つセンサ類(対地・対水速度計測用の音響センサ、水温センサ、圧力センサ)のほか、新たに水中ナビゲーションで必要となる姿勢方位基準装置AHRS(Attitude and Heading Reference System、方位・ピッチ・ロールを検知)に加え、超音波式の高度計を搭載している(図4)。水中重量300g以下を実現した直径9cmのNucleus1000は、測定レンジ0.1m~50m、耐圧300m水深相当の仕様を持ち、沿岸域での小型水中ビークルの活用機会の増大に貢献する。また、専用のINS演算処理機能の開発が2023年末に完了したため、本機がDVLとINSを一体とした水中ナビゲーションユニットとして使用できるようになった。つまり、Nucleus1000は単体でマイクロAUV、ROV、USV等の水中ナビゲーションユニットとして使用することができる。
図4 左)Nortek社製Nucleus1000の外観、右)Nucleus1000が搭載する各種センサ類と仕様抜粋
Nucleus1000の特徴はインターフェースの簡略化、性能を犠牲にしない小型化、高性能DVLと同等の機能・性能の保持に重点を置いて設計されている点である。通信・電源ケーブル1本で水中ビークルと接続するインターフェースデザインは、接続の際に要求される調整作業を軽減することとなり、時間とコストの両方から小型水中ビークルの量産化を支援する。また、小型化されたNucleus1000は、従来のDVLと同レベルの高精度な速度計測が実現できる設計となっている(長期精度0.3%を実現)。この精度は、他の同社DVLと同様に実海域における試験と改良・開発を数多く繰り返すことで達成している。
その他、基準面を使用した速度(対地速度)が深度の急激な変化などの要因により取得できなくなった際には、対水速力を自動で算出する機能も、同社の他のDVLシリーズと同様に標準で搭載している。Nucleus1000は従来品を小型化したDVLではなく、小型水中ビークルに求められる高度な海上・水中作業に対応しつつ、水中ビークル開発者による作業負荷の軽減も視野に入れて独自開発されたDVLという点でユニークな製品である。
8 Nortek社製DVLおよびNucleus1000を搭載した小型水中ビークルの事例
小型水中ビークルを採用するケースには、水産養殖における魚群の目視検査から、海底の広範囲を探査するために協働するマイクロAUVのロボット群(swarm)といったものまで、多岐にわたる。これらの小型水中ビークルに共通する点は、無人航空機UAV(Unmanned Aerial Vehicle)市場と同様に、拡張性と利便性がありながら比較的低コストで大量生産が可能なことである。
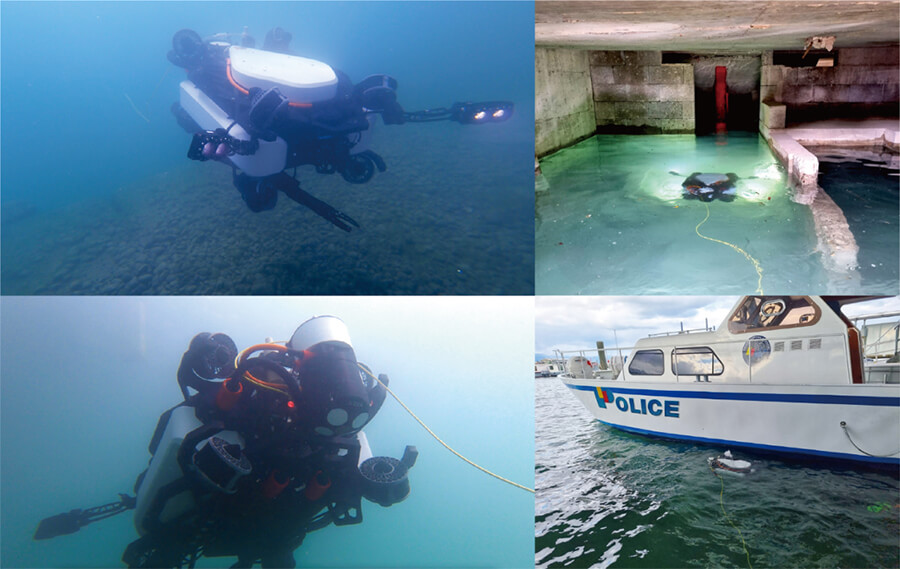
小型ROVでは、潜水士にとって危険を伴うような水中インフラの点検や捜索・救助活動において、代わりに水中ビークルがその作業を実行する例も出てきている(図5)。小型ROVは1~2人で水中投入を可能とする設計であるため、専用の発進・回収設備LARS(Launch And Recovery System)を持たない小型の船舶等による運用が容易となっている。
図5 左上)Tethys Robotics社製小型ROV外観、左下)下向きに搭載されているDVL500 Compact、右上)潜水士に代わり、水中構造物内を調査している様子、右下)ROVの開発当初はスイス連邦の地方自治体と協力(courtesy Tethys Robotics)
小型のAUVおよびUSVは、海上の再生可能エネルギー分野においても注目されている。海上の再生可能エネルギー生産は、石油・ガス開発と異なり、送電線が陸地と接続する地点の数が多い。これらの地点、特に浅瀬付近では、送電線の設置や保守に関する現地調査と検査作業の両方が必要とされる。高い作業効率と低コストを多数の作業地点において達成するためには、新しく調査・検査用のプラットフォームが必要となる。沿岸域の多様な水深に柔軟に対応しつつ、遠隔・自動で動作するような拡張性と利便性に優れた小型で安価なAUVやUSVが求められている。
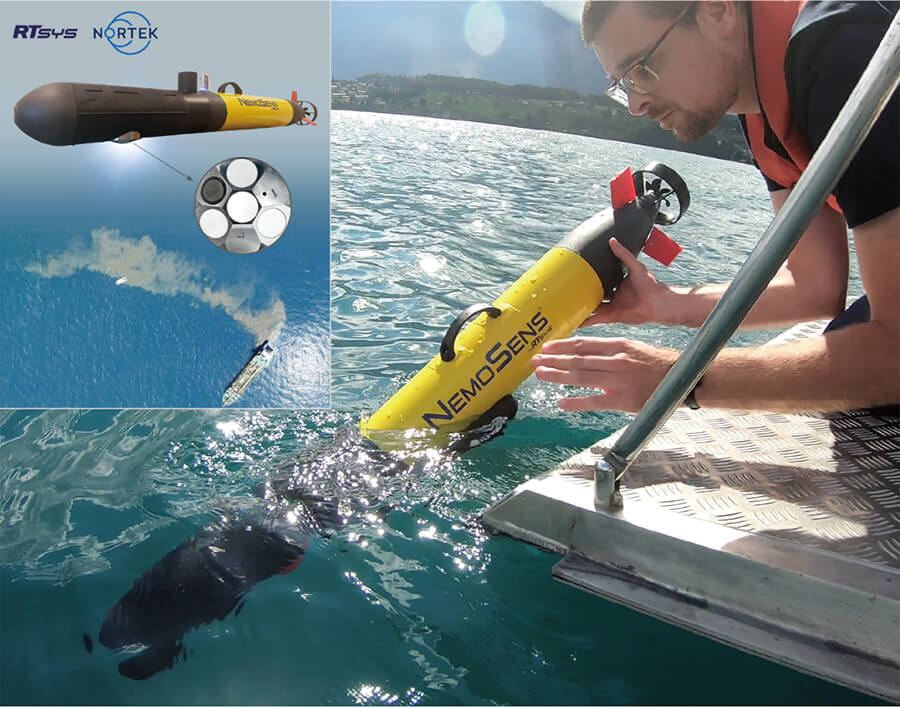
そこで小型のAUVを環境調査に用いた例として、洋上の定常監視プラットフォームの間にある、データを取得することが困難な領域を対象に、自動航走する水中ビークルを用いて定期的にデータ採取を行う試みがある。例として、DVLと多層流向流速計測機能ADCP(Acoustic Doppler Current Profiler機能)を持つ「ハイブリッド」センサと濁度センサを搭載した小型AUV、RTsys社のNEMOSENS μAUVがある(図6)。この小型のAUVにはNortek社製のNucleus1000が搭載され、水面に設置されたブイの間を自動で往復しながら浚渫プルームの追跡に必要な流速情報と水中濁度データを取得することに成功している。
図6 RTsys社製の小型AUVである NEMOSENS® μAUVにNucleus1000が搭載された事例(courtesy RTsys)
9 さいごに
水中の無人ロボットや自律型ロボットを大規模に展開するための現実的な選択肢を海中産業に提示する方向で、小型水中ビークル市場は急速に拡大している。
このロボット技術を有効にする鍵は、最適なサイズとコストと同時に、最適な性能を持つ水中ナビゲーションセンサと測量センサを開発することと考えられる。また、効率的な航行を実現し、高品質の調査・検査データを収集できるような小型水中ビークルを実現するためには、高い水中ナビゲーション性能が不可欠である。
Nucleus1000のようなDVLとINSが統合された水中ナビゲーションシステムは、性能向上のみならずセンサ間の統合と連携作業を行う技術者の負担を軽減することにも貢献する。小型水中ビークルの開発者やユーザは、このような一体型のセンサパッケージを使用することで、センサの統合や連携作業よりもビークル本体の開発に注力することが可能になり、ビークルの開発速度の向上に繋がるのではと考える。
今後さらに多様化・複雑化する小型水中ビークルのニーズに対し、拡張性と利便性を実現したセンサの開発を通じて、水中産業における小型水中ビークルの開発効率の向上や高性能化に貢献できることに繋がれば幸いである。
【著者紹介】 國分 祐作(こくぶ ゆうさく)
■略歴
2011年 独Leibnitz Institute for Baltic Sea Research 招聘研究員 2012年 JFEアドバンテック株式会社 入社 2014年 東京海洋大学大学院 海洋科学技術研究科 修了 博士(海洋科学) 2017年 Nortekジャパン合同会社 入社
2018年より現職
■執筆歴 https://sensait.jp/12234/ https://sensait.jp/12235/
研究の要旨とポイント
プレスリリースサイト:https://www.tus.ac.jp/today/archive/20240311_8132.html
ポイント
プレスリリースサイト(aist):https://www.aist.go.jp/aist_j/press_release/pr2024/pr20240308/pr20240308.html
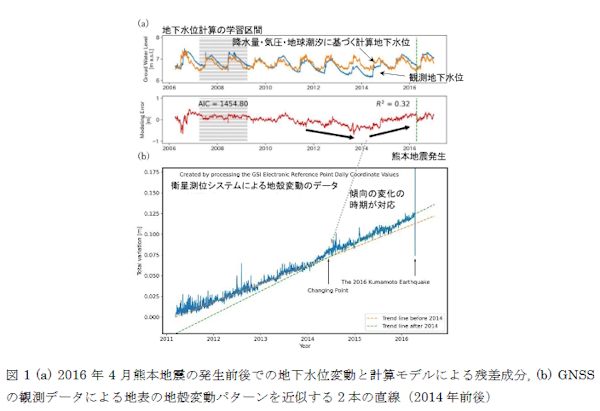
京都大学大学院総合生存学館 山本駿 大学院生、工学研究科 小池克明 教授、総合生存学館 山敷庸亮 教授、熊本大学理学部 嶋田純 名誉教授の共同研究により、2016年4月に発生した熊本地震前後の長期にわたる多地点での地下水位観測データを詳細に分析した結果、地下水位は地殻歪みを感知するセンサとして機能し、特に主要な帯水層である砥川溶岩での変動が地殻歪みと関連することがわかった。
プレスリリースサイト(kumamoto-u):https://www.kumamoto-u.ac.jp/whatsnew/sizen/20240307
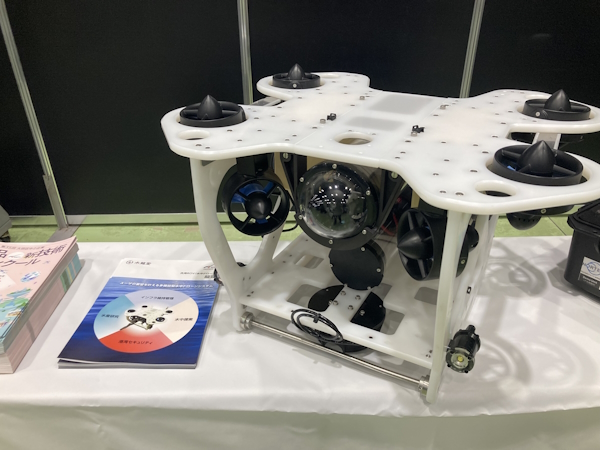
ROV(水中ドローン)メーカーである(株)水龍堂はこの度、公益財団法人 大田区産業振興協会主催の第35回新製品・新技術コンクールにて奨励賞を受賞した。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000008.000096677.html
STマイクロエレクトロニクスは、オール・イン・ワンのdToF測距センサ「VL53L9」およびiToF測距センサ「VD55H1」を発表した。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000001362.000001337.html
artienceグループのトーヨーカラー(株)は、千葉大学との「キノフタロン黄色色材の結晶構造解析」に関する共同研究成果を日本化学会第104春季年会(2024)で発表する。
プレスリリースサイト:https://www.artiencegroup.com/ja/news/2024/24030502.html