2) T. Yang, D. Xie ,Z. Li, H. Zhu: Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and device performance, Materials Science and Engineering: R: Reports, vol.115, pp.1-37, 2017.
3) M. Park, B. Bok, J.H. Ahn and M.S. Kim: Recent Advances in Tactile Sensing Technology, Micromachines, 9(7), 321,2018.
4) C. Gonçalves, A.F. da Silva,J. Gomes and R. Simoes: Wearable E-Textile Technologies: A Review on Sensors, Actuators and Control Elements, Inventions, 3(1), 14 ,2018.
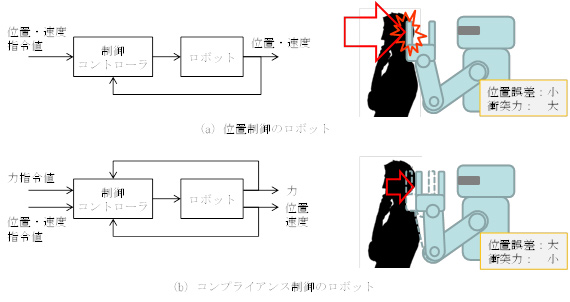
*1) 「ロボット新戦略」ロボット革命実現会議(2015) *2) G. Hirzinger, et al. “On a new generation of torque controlled light-weight robots.” in Proceedings of the International Conference on Robotics and Automation (ICRA2001), pp. 3356-3363, 2001.
記事セクションでは、園芸システムに関する主要なトピックを取り上げた特集記事へのリンクを紹介している。特集記事には、Microchip Xplainedボードを使用した、センサベースのモニタリングプラットフォームを紹介する“A Smarter Green Thumb(園芸をよりスマートに)”、照明とデータ転送を同時に実現するLEDとLi-Fi技術について解説する“LEDs and Li-Fi Brighten the Future of Connected Lighting Systems(LEDとLi-Fiがコネクテッド照明システムの未来を照らす)”など、ソリューションベースの記事を掲載している。
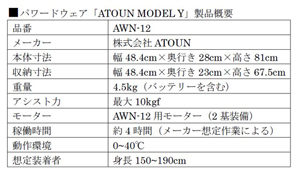
オリックス・レンテック(株)は、本日より、(株)ATOUNが開発したパワードウェア 「ATOUN MODEL Y(アトウン モデル ワイ)」の法人向けレンタルサービスを開始すると発表した。取扱いは同社の次世代ロボットレンタルサービス「RoboRen」とのこと。
パワードウェア「ATOUN MODEL Y」(写真)は、床面付近から腰の高さ程度までの物の持ち上げや下に降ろす際に、腰の負担を軽減する着用型ロボット。軽量なカーボン樹脂製で、リュックサックのように背負い、腰と両脚をバンドで固定して装着する。内蔵する角度センサが体の傾きを感知し、モーターによって腰と両脚をつなぐバーが引き合ったり、突っ張ったりすることで腰の曲げ伸ばしを補助する。中腰の作業では、バーが自動で固定されるため、荷物の積み下ろし作業による腰への負担が軽減できる。1回の充電で約4時間稼働し、最大10kgの重量をアシストするという。
「RoboRen」の「6カ月お試しレンタルパック」では、月額61,600円~(税別)のレンタル料金。
今回の機種追加により、「RoboRen」の取り扱いロボットのラインアップは19メーカー、40機種。