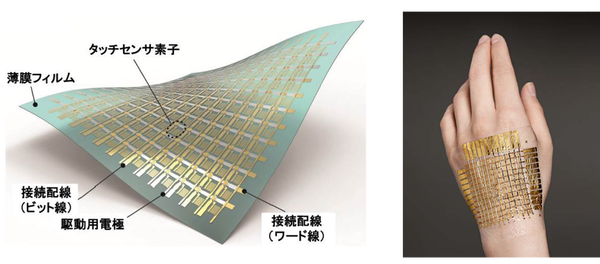
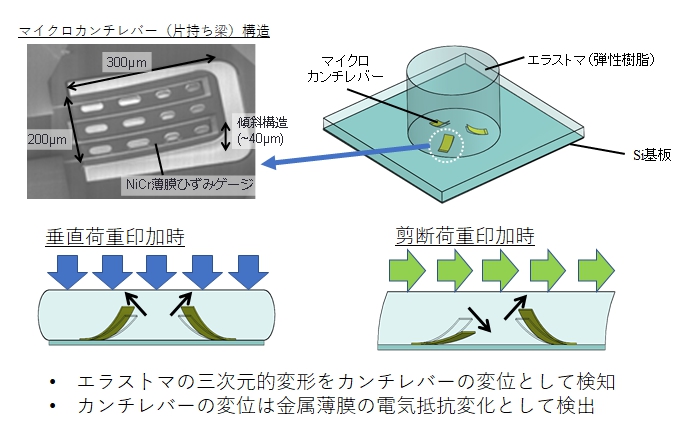
このほか、検出素材として、ナノチューブ、グラフェン、硫化モリブデンが利用されるなど、新たな変換材料の試みも行われている。また、力、近接距離、温度、湿度など各種検出器をフィルム上に製作することで多角的センシングを行う試みも行われている6)。
ただし触覚は接触により情報収集を行う。このため伸び、縮み、擦り、打撃などに対する物理的耐久性や、水,油、湿気などの浸透に対する化学的耐久性が重要となる。E-skin に関して、現実の環境での実績に関して筆者は残念ながら知らないが、最近開発が進んだこともあり長期間に渡る安定性については未知の部分があると思われる。
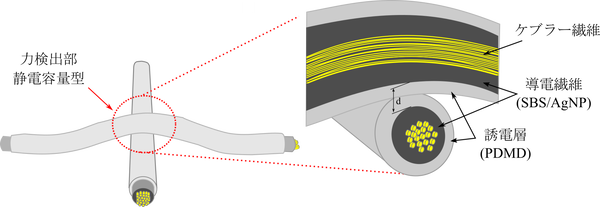
このように検出原理は、編上げた繊維間の静電容量や接触抵抗の接触力による変化から荷重を検出する。織物としてセンサを構成する方式は、製作が比較的容易で安価に作れ、大面積化が容易、柔軟性もあるなどの特徴を有する。このため現在wearable e-textile として、ヘルスケア、スポーツ、ゲームなどの分野での利用が行われている。また、ロボットでは空間/強度分解能が低くても良い部分などへの利用は適当であろう。
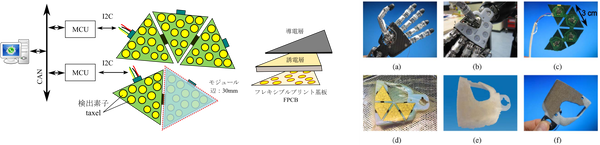
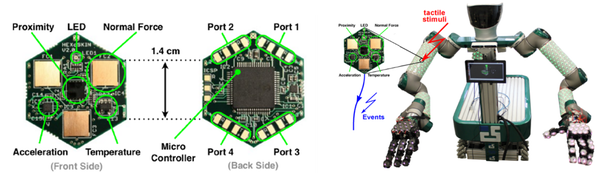
近年モジュール構造としたセンサでロボット全体を覆い、各モジュールを階層的バス方式で接続する触覚センサがある。例えば、実際にロボットに利用されたセンサとしては、iCub skin(図5)、HEX-O-skin(図6)などがある。
iCub はフレキシブル基板上に電極を作り、誘電体を挟んだ静電容量式である8)。図のように電極を三角形状とし物体をこのパッチで覆う。この三角形中には12 個の検出点があり、I2C 経由で検出データを転送している。
静電容量式は薄型で構造がシンプル、誘電体により検出感度などの特性を変更可能、静電容量検出専用の計測ICがあるため利用しやすいなどの利点がある。しかし、静電容量式では、対象物の材質や体積によってもセンサ出力が変化し、特に検出物体と地面の間での接地状態にも依存してセンサ出力は変化するため、物体に依存せず距離・姿勢を計測することは難しい。また電磁ノイズ、温度の影響を受けやすいなどの欠点がある。
参考文献
2) T. Yang, D. Xie ,Z. Li, H. Zhu: Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and device performance, Materials Science and Engineering: R: Reports, vol.115, pp.1-37, 2017.
3) M. Park, B. Bok, J.H. Ahn and M.S. Kim: Recent Advances in Tactile Sensing Technology, Micromachines, 9(7), 321,2018.
4) C. Gonçalves, A.F. da Silva,J. Gomes and R. Simoes: Wearable E-Textile Technologies: A Review on Sensors, Actuators and Control Elements, Inventions, 3(1), 14 ,2018.
5) M. Kaltenbrunner, T. Sekitani, J. Reeder, T. Yokota, K. Kuribara, T. Tokuhara, M. Drack, R. Schwödiauer, I. Graz, S. B. Gogonea, S. Bauer & T. Someya, An ultra-lightweight design for imperceptible plastic electronics, Nature 499, 458–463, 2013
https://www.youtube.com/watch?v=4oqf–GMNrA
6) Q. Hua, J. Sun, H. Liu, R. Bao, R.Yu, J. Zhai,C. Pan & Z.L.Wang: Skin-inspired highly stretchable and conformable matrix networks for multifunctional sensing, Nature communications, 9:244, 2018.
7) J. Lee et al., Conductive Fiber-Based Ultrasensitive Textile Pressure Sensor for Wearable Electronics, Adv. Mater., 27, pp.2433–2439, 2015
8) A. Schmitz , P. Maiolino, M. Maggiali, L. Natale, G. Cannata and G. Metta: Methods and Technologies for the Implementation of Large-Scale Robot Tactile Sensors, IEEE Trans. Robotic, 27(3), pp.389-400, 2011
https://www.youtube.com/watch?v=yQGXYGS0Ojo
9) P. Mittendorfer, G. Cheng: Humanoid Multimodal Tactile Sensing Modules, IEEE Trans. Robotic, 27(3), pp.401-410, 2011.
10) Florian Bergner ; Emmanuel Dean-Leon ; Gordon Cheng, Event-based signaling for large-scale artificial robotic skin – realization and performance evaluation, IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2016
https://www.youtube.com/watch?v=H66vDX3wAZQ