電気通信大学 名誉教授
5. 触覚センサに望まれる機能 24)
(1)高速応答性が重要である。
(2)伸び縮み可能で広い面を覆える。
(3)耐久性がある
(4)近接情報が大切である。
図10 物体までの距離と方向を検出する近接覚センサ。接近検知などへの利用
視覚は物体近傍ではオクルージョンがあり、触覚は離れると検出できない。これは把持や操りでは大きな欠点であり、接触が離れても計測できる近接覚を利用する方が合理的と思える。なお、触・近接覚センサは近接覚と弾性体を組合わせることで構成できる。すなわち、弾性体に接触した後の距離変化から接触力が計測できる。このため、触・近接覚センサは、比較的簡単に構成でき、かつ有用性が高いと思われる。
6. まとめ
(1)WearableセンサやIoT機器への応用を目指し、薄く柔軟性があり、大面積化が可能で伸縮性を備えた、印刷技術や繊維・織物技術を用いて製造した安価なセンサの利用が進むと思われる。またロボット、人体などの3次元構造物に直接印刷して触覚センサを作成することも可能となる。
(2)カメラモジュールを用いた高空間分解能型の触覚センサは、視覚情報処理技術との相性もよく、ロボットハンドなどへの利用が進むと思われる。
(3)近接覚を基礎とした、触近接覚センサは、空間拡張型触覚センサとして、一つの発展の方向性を示す。また近接覚は、視覚と触覚をシームレスにつなぐセンサとして、ロボット分野での安全性の確保や高速性の向上のため利用が進むと考える。
(4)ロボットの制御では、視覚と触覚の協調により、ロバストな、より高性能な操りが可能となる。操りが可能から、より巧みにできるためには視覚、触覚など多角的情報による制御が必要になるだろう。特にロボットによる巧緻な作業での制御アルゴリズムの構築では機械学習が新たなフレームワークとツール提供するであろう。
24) 下条誠、これからの触覚技術、日本ロボット学会誌、37(5), pp.385-390, 2019
【著者略歴】 下条 誠(しもじょう まこと)
専門分野
立命館大学
6. 終わりに
本稿では、超小形のMEMS触覚センサのアイデアからスタートして、ひとの触覚の持つ特徴やそこから加賀得られるヒトの触覚モデルを模し、機械学習の技術を用いて人口触覚情報処理のためのステージモデルを提案した。これまでの成果では1個のカンチレバーによって複数のカンチレバーの出力をもしており、ステージモデルとしての可能性を示した段階に過ぎない。今後は高密度に複数のカンチレバーを実装した触覚センサを用いた研究を継続する。
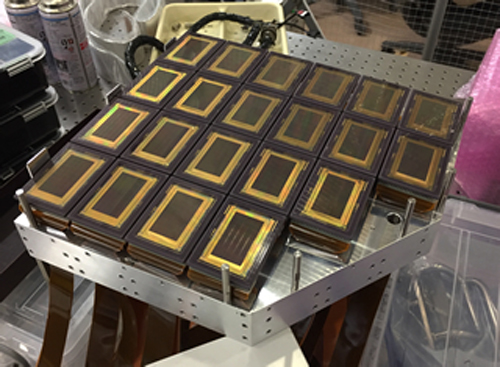
現在のMEMS触覚センサはプロセスの改良によって直径 1mmの中に小型化した12個のカンチレバーを納めたサンプルの開発に成功している。これをさらに小型化する目処は立っており、センサの実装密度としてはヒトの触覚受容器官なみ100/cm2 での配置が技術的に可能である。ここで課題となるのが電源の供給と信号の出力である。カンチレバーの変形を計測するには、機械的変形をひずみ抵抗として計測しており、現状は各カンチレバーにホイートストンブリッジと後利得のアナログアンプを接続している。しかし1cm2 に数百個のカンチレバーを実装する段階では、このアナログ回路を設けることは現実的ではない。われわれは現在これをデジタル回路の周波数出力で処理する仕組みを開発中であり、将来的にはフルデジタルでの信号処理の実現を目指している。
本センサを高密度に実装し誰もが手軽にその出力が利用できるようになれば、光学情報処理、つまり、映像情報処理(Computer Vision)の研究に匹敵する触覚情報処理(Computer Haptic)分野を立ち上げることが可能となる。複数の素子から同時に得られる情報から必要な信号のみを分離する研究はコンピュータビジョン研究で広く知見が得られており、その多くが触覚情報処理にも応用が可能である。それに向けて、センサの実用化に今後も邁進していく。
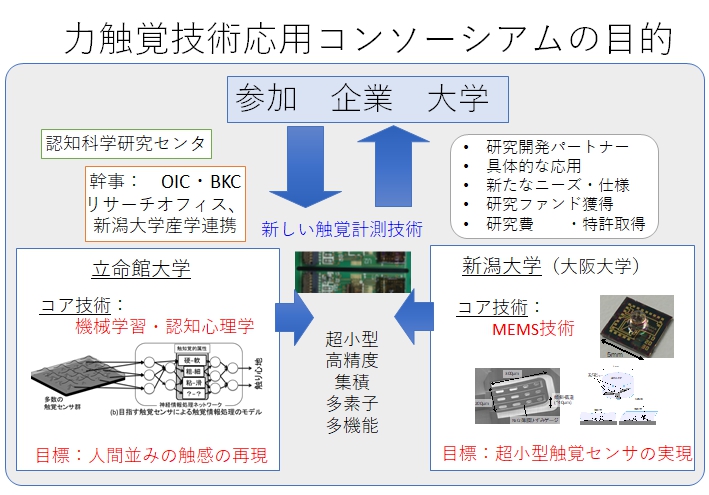
なお、本センサの開発情報は立命館大学 認知科学研究センターに設けられた力触覚技術応用コンソーシアム(http://www.ritsumei.ac.jp/research/center/consortium/tactile/ )において、定期的に実施する研究会において公表している。
謝辞
【著者略歴】 野間 春生(のま はるお)
学会役職
専門分野・研究テーマ
埼玉大学 工学部
4.耐故障計測の原理と実証試験
本節では前節で述べた対策2の方法について述べる。上述の通り、力覚センサは3軸のものと6軸のものが一般的に利用されているが、力の検出に用いられるデバイスのチャンネル数は冗長な構成になっていることが多い。したがって、一つのチャンネルに故障が発生しても、他のチャンネルが正しい値を提示していれば故障を診断し、補償出力を導出することができる。
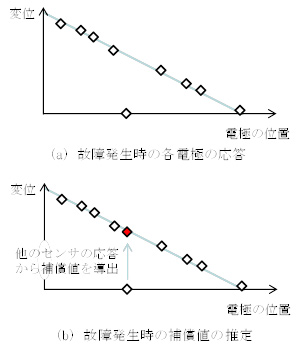
そのアルゴリズムを以下に説明する。数学的に厳密な説明は避け、図を用いた概念的な説明とするが、詳細は文献4) を参照されたい。複数の電極を配置したセンサを想定し、そのうちの一枚の電極が故障した場合に各電極が示す変位の値をグラフで示したものを図3(a)に示す。故障したセンサの応答値のみ他の応答値から明らかに外れていることが確認できる。冗長なチャンネル数で検知をした場合には、それぞれのチャンネルの応答には相関性があり、故障が発生したチャンネルのみ、その相関的関係から外れた値を示すことになる。
また図3(b)のように、明らかに外れているチャンネルが示すべき応答値も他のチャンネルの応答値から推定することができる。したがって、以下の手順で処理することによって、故障が発生した場合にも故障診断を行い、値を補償して出力し続けることが可能になる。
図3 故障発生電極の特定と補償値の推定
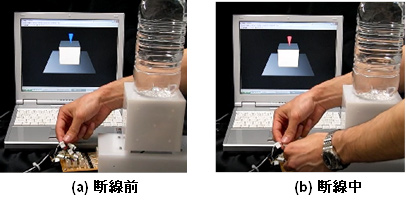
上記のアルゴリズムを実装した試験の様子を以下に記す。まず、原理的検証を歪ゲージ型の力覚センサで行った時の様子を図4に示す。9枚の歪ゲージの応答値を9チャンネルのAD変換機で計測し、その値から外力値を計算し、PCのディスプレイに可視化してCGで表示している。9チャンネルのうちの一つを断線すると、故障の発生したチャンネルを特定し、その値を補償することで右の図に示すように故障中も誤差の少ない計測値を示していることがわかる。
図4 故障発生時の力センサの応答(CGで可視化)
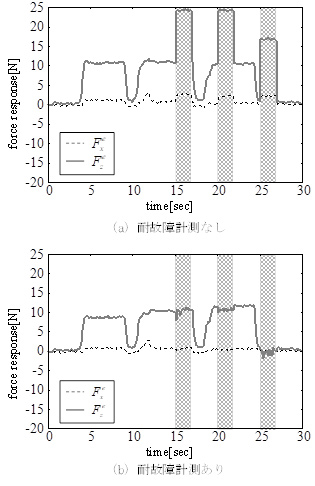
耐故障計測アルゴリズムなしで計算した場合とそのアルゴリズムを入れた場合の応答値を同じ実験結果から導出し、比較したものを図5に示す。灰色の領域で示されている時間帯に断線が発生しているが、その間も耐故障計測アルゴリズムを実装した場合には値の変動が抑制されている。
図5 故障発生時の力センサの応答(実測値)
5. まとめ
力学的に人を支援するロボットが広く実用化されるためには力覚センシングの信頼性を高める安全技術が必須である。そこで、筆者のグループでは壊れにくい力覚センサを開発した。力覚センサの信頼性が高まれば人間支援ロボットの安全性の抜本的改善が期待される。故障リスクがネックとなっている協働ロボットの技術をさらに発展させるためには力覚センサの信頼性を高める試みを引き続き進める必要がある。
参考文献
*4) Toshiaki Tsuji, Ryosuke Hanyu: “Fault Tolerance Measurement Using a Six-Axis Force/Torque Sensing System with Redundancy, ” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2010), pp. 1890-1895, 2010.
【著者略歴】
2018年度,2019年度日本ロボット学会理事。再生医療とリハビリテーション学会
2006年度,2007年度ファナックFAロボット財団論文賞等を受賞。主として力覚センシングとその信号 処理に関する研究に従事しており、リハビリ支援ロボット,モーションコントロール技術に応用している
浜松市では社会的課題の解決×テクノロジー活用による産業振興を推進するため、様々な自然環境を抱える浜松市を舞台にした実証実験プロジェクトを全国より募集する「浜松市実証実験サポート事業」を今年度より実施している。その一次審査(書類)において、ベンチャー企業等8社が審査を通過したと発表した。https://www.city.hamamatsu.shizuoka.jp/hamact/hjs/index.html
キヤノンは、グローバルシャッター機能の搭載に加え、可視光域と近赤外線域※での撮像を同時に行うことができるCMOSセンサ”3U5MGXSBAI”を発売すると発表した。
ボッシュは、2019年10月より、自動運転用高精度3Dマップ向け自車位置推定技術「Road Signature」のデータ取得に取り組んでおり、2020年度内に高精度3Dマップに統合可能なマップ用データを完成させる予定だと発表した。https://www.bosch.co.jp/press/rbjp-1910-02/