
山本 日登志
高性能ネオジム焼結磁石はスマホ、携帯電話、パソコン、工業用モータ、ロボット、EV(電気自動車)、HEV(ハイブリッド自動車)、風力発電等に幅広く使用されるようになった。このネオジム焼結磁石に関しては他の文献や資料に数多く紹介されているので今回は割愛させて頂く。ご興味のある方は著者にメールにてお問合せ頂ければ幸いである。
ここでは新規に研究開発され今後アクチュエータや環境発電あるいは3次元磁気センサ用途として期待されている永久磁石エラストマーをご紹介してみたい。
永久磁石エラストマーは永久磁石粉末とゴムやシリコーンゲルのような弾性体を混合して加熱硬化させた高粘弾性特性を有する新規な磁気機能永久磁石材料の事である。磁性エラストマーの研究に関しては既に鉄粉とシリコーンゲルを混合させて作成された報告があるのでそちらを参照頂きたい。1)、2)
ところがこれら磁性エラストマーは鉄粉を磁化させるために電磁石等の磁場発生源が不可欠であった。今回研究開発された永久磁石エラストマーは既にそれ自身で磁化を保持(これを保磁力という)しているので特別な磁場発生源が不要な事が最大の特徴である。つまり永久磁石エラストマーはこれ単独で外部電源が不要なデバイスになりえるという事である。簡単なエラストマーの模式図を以下に示す。
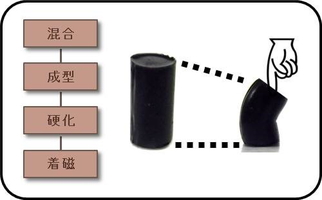
永久磁石エラストマー(以下エラストマートと呼ぶ)の作製
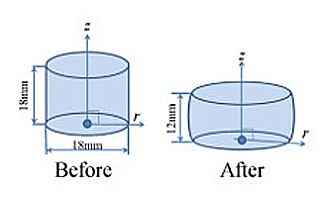
永久磁石粉末としては市販のボンド磁石用のネオジム磁石粉末(例えばマグネクエンチ社、MQFP- 14-12-20000-089)等を用い、磁性粉末の分散性を良くするため約5μ程度の平均粒径のものを選定した。高粘弾性を有する弾性体としてはシリコーンゲル(ジャパンモーメンティブ社TSE3062)等を使用した。まずネオジム磁石粉末をシリコーンゲルに入れてよく混合、その際真空脱泡機で脱泡処理を行う。次に試料容器近傍にネオジム磁石を設置し印加磁場下で試料容器にこの混合スラリーを投入し加熱硬化させた。硬化処理して常温まで放冷し、最後にパルス磁場装置等で着磁してエラストマーが完成する。今回は試料容器をφ18mとし得られたエラストマーは図に示す約φ18x18mmの円柱状の形状で作製した。試料容器形状を変えれば立方体、直方体、円盤状等任意形状のエラストマーの作製も可能である。なお着磁方向は今回試料の円柱軸18mm方向(z)に行った。
ネオジム磁石粉末の量を多くすればエラストマーから外部に出る磁束を増大出来るため磁場の強さの点では磁石粉末は多い方が良い。しかしネオジム磁石粉末を多くすると高粘弾性特性が低下するので大きな変形が困難となりかつ機械強度も若干低下する。用途やエラストマーの寸法&形状にもよるが磁場強度と高弾性性能を両立させるネオジム磁石粉末の重量比はおおむね50-70重量%が最適であった。
次回に続く-
参考文献
1) Tetsu Mitsumata and Noriyku Abe, Chemistry Letters Vo.38, No9 (2009)
2) Vinh Quang Nguyen, R.V. Ramanujan, Macromol, Vol.216, No.6 (2010)
3) 竹内、岩本、出口、井門、藤井、山崎、山口、MAGDA講演会予稿集, (2016)
【著者略歴】
山本 日登志(やまもと ひとし)
(株) KRI フェロ&ピコシステム研究部
■略歴
九州工業大学電気工学科 (1970-1974)
九州大学大学院電気工学科修士課程、博士課程 (1974-1979)
住友特殊金属(1979-2006)、工学博士取得 (1980)
日立金属 (2007-2009)
KRI (2010-現在に至る)
国内登録特許件数;永久磁石材料、製造方法、磁石応用関連で約120件以上
国際規格IEC/TC68の永久磁石国際規格主査 (1998-2002, 2006-2008)
JEITA(電子情報技術協会)マグネット技術委員 (1998-2008)
NEDO「フライホイール電力貯蔵用超電導軸受け技術開発」委員(2003-2006)
世界人名辞典 “Who’s who in the world” に日本人永久磁石研究者として初掲載 (2006)
■専門分野・研究テーマ
永久磁石材料、磁石材料応用技術、磁性材料全般、磁気計測
磁気通信技術と実用事例(1)

藏谷 朋哉
1.はじめに
土木工事では保安監視を目的として様々なセンサが設置される。これらのセンサは地中,水中や構造物に埋設されることが多く、計測データを取得するための測定器とケーブルによって接続される。そのケーブルにより、構造物の安全性の低下や、施工の障害等の問題を引き起こすことがあり、無線によるデータ伝送システムの開発が取り組まれてきた。
しかし、伝播媒質が地中や水中の場合、一般的なデータ伝送手段として使用されている光、音波は減衰が大きく不適当であり、また電磁波についても通常の通信に用いられている高周波電磁波(電波)は、同様の理由で使用することが困難なため、実用的な手段がほとんど実現できていなかった。
上記を解決するため、低い周波数帯域の電磁波(低周波電磁波)を用いた地中無線通信システム(以下、本システム)を製品化し、多くの現場で実績を重ねているので、ここに紹介する。
2.地中無線通信システムの概要
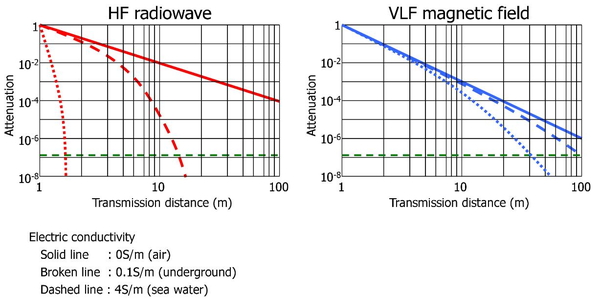
前述のとおり、本システムは土中、岩盤中、水中、空気中でデジタルデータ伝送が可能な低周波電磁波を用いた通信システムである。図1に高周波電波と低周波電磁波の減衰特性を示す。一般的な無線通信手段に用いられる高周波電波は、図1左のように地中や水中における減衰が大きいことが分かる。
対して、図1右のように可聴音と同程度の低い周波数帯域の電磁波を使用すると、地中や水中など導電率の低い媒質中でも減衰の程度がほぼ変化しない。空中だけで比較すると高周波電波に比べて減衰は大きいものの、様々な媒質で100m程度の通信をおこなうことを考えると、適当な通信手段になりえる。(1)
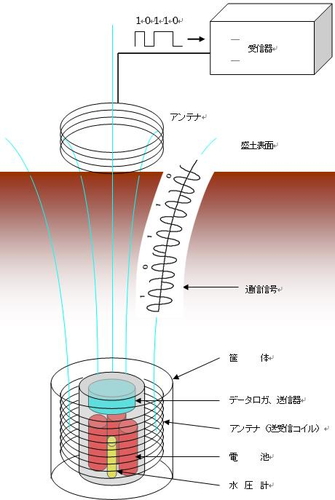
本システムの構成例を図2に示す。本システムは、地中もしくは水中に埋設される送信器と、地上に設置される受信器から構成される。送信器は、データの送受信をおこなう送受信アンテナ、データロガー、バッテリーおよびセンサから構成される。図2ではセンサに水圧計を使用しており筐体に内蔵されているが、周辺に設置されるセンサを接続することも可能である。
受信器は、データ受信アンテナ、指令送信アンテナ、受信器本体から構成され、可搬型受信器の場合は、バッテリーが搭載される。
3.実用例(2)
3.1海底地盤の沈下測定
3.1.1 従来の計測方法の課題
海中の埋立工事等では、盛土荷重の増加に伴う海底地盤の沈下や地中の水平変位を計測する必要がある。また、供用後の施設管理のために沈下を計測することは重要である。従来は、海底のセンサから地上までケーブルにより接続して計測を行っていたが、沈下に伴うケーブルの断線やケーブルルートの確保が問題であった。また、沈下計測の場合、沈下板と鋼管を用いた鋼製沈下板による観測が一般に行われているが、沈下板近傍だけは周辺よりも慎重な盛土作業が求められる。また、埋立が進み鋼管が海上に突出するまでの期間は海中での計測作業が必要になる。
3.1.2 地中無線通信システムによる海底計測
本システムを用いた海底計測システムの概略を図3に示す。
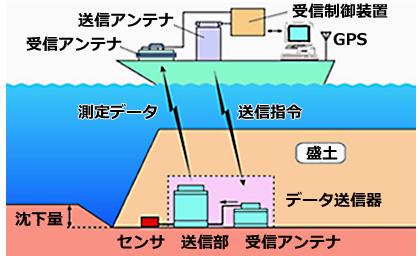
沈下を計測する場合には水圧式沈下計、地中水平変位を計測する場合には複数の傾斜計を接続している。計測データは、データロガーを内蔵した送信器から無線で発信され、海上の計測作業船で受信して回収される。海底の送信器は内蔵されたバッテリーで動作し、運用可能期間はおおむね10年程度である。本システムで使われる低周波電磁波は図1のように通信媒体(海水中、地中)によって減衰率が変化する。海上空港島のような埋立による構造物の場合、埋立の進行に伴い通信媒体が海水から地盤に変化し、通信距離が長くなる方向に媒体が変化する。つまり沈下が大きくなっても、通信媒体が海水より通信効率の高い地盤に置き換わることから、地上に盛土や構造物が構築されても十分通信できることを意味している。また、主に沈下によるケーブル断線が招く計測不能のリスクが軽減され、より安定した計測が長期間可能となる。このようなことから、本システムを用いた海底計測は、埋立工事から地上構造物の供用期間まで一貫して連続的に計測することが可能であり、工事からその後の維持管理まで貢献できる技術と言える。
現在(2019年11月)でも関西空港2期工事をはじめ、全国で250機以上利用されている。
今後は、より供用期間中の計測期間を延ばすために、システムの運用可能期間の更なる延長が望まれる。また、この技術は沈下や地中水平変位の計測に限らず応用可能なため、これからの港湾構造物等で利用されていくことが期待される。
次回に続く-
参考文献
1) 遠目塚良一、山崎宣悦:磁気を利用した通信方式 電気学会研究会資料-マグネティクス研究会 pp.5-10
2) 須賀原慶久、樋口佳意、才田誠、石坂周平、川島実:地中無線通信技術による構造物の計測と維持管理計測への適用 地盤工学会関西支部地盤の環境・計測技術に関するシンポジウム2006
【著者略歴】
蔵谷 朋哉(くらたにともや)
坂田電機㈱ 技術部
2012年 国立都城高等工業専門学校 卒業
化粧品メーカーおよび医薬品メーカーを経て
2016年 坂田電機株式会社 入社(技術職)
2019年 現在に至る
AI画像認識技術・IOT端末を利用したビルオーナー向け交通量調査自動化サービス「IDEA counter」

Intelligence Design(株)は、AI画像認識技術・IOT端末を活用した交通量調査自動化サービス「IDEA counter」をリリースする。
(画像は人数カウントのイメージ)
●概要:「IDEA counter」は、Intelligence DesignのAI技術「IDEA」の画像認識技術を利用した交通量調査自動化サービス。(株)ソラコムのIOT端末、「S+Camera Basic」とセットにすることで、ビルテナントから歩道/道路が画角に入るようにカメラを設置するだけで、計測可能となるサービスだという。
車両・歩行者の検出には、Intelligence Designが蓄積したディープラーニングによる画像認識のアルゴリズムを搭載しており、高い計測精度を実現。
今回のリリースに先立ち、明治神宮前近辺に複数のビルを所持する宮崎ビルのオーナーと連携し、「IDEA counter」を活用した交通量調査を実施した。結果、カウント数が、人の目視によるカウント数と同程度の結果となることを確認した。
今後は建物の前を通る通行者の行動情報などのデータを取得するとともに、当該データをマーケティングに利用して貰う体制の構築を進めていくとしている。
●サービスの特徴:
1. 長期間の計測が低コストで可能
交通量の調査は人手による計測が行われてきた。今回のようにAI映像解析によって自動で実施することで、従来難しいとされた長期間の計測を低コストで実施することが可能となる。
2. Intelligence Design社独自の画像認識アルゴリズム
映像から高い精度で車両・歩行者を検出するためには、膨大な学習データが必要な場合がほとんど。ID社が今までの案件にて蓄積したアルゴリズムを利用することで、高精度な検出を実現する。
3. 属性情報を取得可能
交通量のカウントができるだけでなく、服装・持ち物などのトレンド情報も取得できるため、マーケティング目的でのデータ取得も可能。
4. 簡易なデータ連携、操作性
「IDEA counter」で検出した交通量データは、リアルタイムでウェブ上から確認が可能。加えて、グラフなどでの可視化も実現。
5.端末導入が容易
従来の交通量調査において必要であった道路使用許可申請も不要、かつソラコム社の端末を設置後、通信部分を起動後すぐに稼働可能となるという。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000004.000048250.html
ST、±0.25°Cの測定精度と柔軟性の高い省電力モードを持つ温度センサ発表

STマイクロエレクトロニクスは±0.25°C(Typ.)の精度、低動作電流、および低スタンバイ電流を特徴とする温度センサSTTS22Hを発表した。
アセット管理システムや荷物輸送用ロガー、冷暖房空調設備システム、加湿器、冷蔵庫、ビル自動化システム、およびコンスーマ向けのスマート機器において、温度と熱流の測定精度を向上させるという。
STTS22Hは、I²CとSMBus 3.0に準拠しており、出力データ・レート(ODR)は最低1Hzで、ワン・ショット・モードによりさらに低頻度で起動が可能。SMBusのアラート応答アドレス(ARA)に対応した割込みピンなど、柔軟性の高い動作モードを備えている。温度がユーザの設定した閾値(上限 / 下限)を超えた場合、アプリケーションにインタラプト信号を発生させることも可能である。また、I²C / SMBusスレーブ・アドレスは2通り選択可能で、最大2個のSTTS22Hが同一のバスを共有できるとのこと。
消費電力は、1Hz ODR動作時に2.0µA、ワン・ショット・モードによる周期的な測定時に1.75µAと非常に低く、バッテリ駆動機器の長時間動作に貢献する。さらに、シリアル・ポートが無効化されるスタンバイ・モードでは、わずか0.5µA(標準値)になり、動作電圧範囲は1.5~3.6Vで、小型のリチウム電池など、さまざまな電源で使用できる。
STTS22Hは、5msのデータ変換時間で高速に動作し、16bitで温度データを出力する。また、周囲温度を正確に出力するために、金属製の放熱パッドを持つパッケージに実装されている。さらに、-10°C~60°Cの範囲で±0.25°C(Typ.)の精度となるように較正された状態で出荷されるため、ユーザによる較正は不要。
本製品は現在量産中で小型・薄型の6ピンUDFNパッケージ(2.0 x 2.0 x 0.5mm)で提供される。1000個購入時における参考価格は、約0.49ドルとしている。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000001010.000001337.html
センサ内蔵軟式野球ボール、テクニカルピッチ軟式M号球発売(先行予約受付中)。

内外ゴム(株)はセンサ内臓の軟式野球ボール「テクニカルピッチ」を12月2日より販売する。現在先行予約受付中。
『TechnicalPitch(テクニカルピッチ)軟式球』とは
軟式ボールの中心部に9軸センサ(※)を内蔵したIoT製品であり、ボール本体は、軟式公認M号ボールと同じ仕様。
スマートフォンとBluetoothペアリングの上、ボール本体を投げると投球データがスマートフォンに転送され、「球速、回転数、回転軸、球種、変化量、腕の振りの強さ」を計測し、専用アプリで投球データの解析が可能。
(※3軸加速度センサ、3軸地磁気センサ、3軸角速度センサ)
・TECHNICALPITCH(テクニカルピッチ)軟式球はM号公認球に準じた大きさで作られている。
・TECHNICALPITCH(テクニカルピッチ)とスマホさえあれば、どこでも投球の分析・確認をすることができる。
・1つのアカウントで複数の投手が登録でき、登録した投手全ての投球データを一元管理することができる。 また、データの同期をとることで、同じアカウントで使用している全ての端末で同じデータを共有することができる。
テクニカルピッチ軟式M号球(No.TP002M) 本体価格:¥27,500(税別)
仕様
本体質量 :136.2~139.8g
本体外形寸法 :71.5~72.5mm
素材 :表面ゴム-天然ゴム、充填材-合成ゴムの発泡体
3次元モーションセンサ:角速度センサ(3軸)
加速度センサ(3軸)
地磁気センサ(3軸)
実使用投球回数(常温):1万球(参考値:保証するものでは無い)
通信 :Bluetooth4.1対応
通信距離 :見通しの良い場所で20m(参考値:保証するものでは無い)
保存温度範囲 :0°C~60°C
使用温度範囲 :5°C~35°C(参考値:保証するものでは無い)
使向地 :日本国内専用
製品サイト(内外ゴム):http://naigai-ocnk.ocnk.net/product/306
ボールウェーブがJAXA宇宙探査イノベーションハブの研究提案募集に採択
ボールウェーブ(株)は、宇宙航空研究開発機構(JAXA)宇宙探査イノベーションハブ(以下、「探査ハブ」)が実施する「太陽系フロンティア開拓による人類の生存圏・活動領域拡大に向けたオープンイノベーションハブ※1」に関する研究提案募集に、課題解決型研究として採択された。本研究では、「多種類の揮発性物質に対する高感度・高精度な可搬型ガスクロマトグラフ※2の開発」をテーマとして、各種ガスや揮発性有機化合物の検出に利用可能な可搬型の高感度・高精度揮発性物質センサの実現と、その社会実装及び宇宙探査における利用を目指すJAXAとの共同研究(以下、「本研究」)を実施すると発表した。
※1. 国立研究開発法人科学技術振興機構「イノベーションハブ構築支援事業」に採択、支援を受けており(事業期間:2015年6月1日~2020年3月31日)、本研究はこの事業に基づく共同研究として実施する。
※2. 中空の管をリールに巻いたカラムと呼ばれる流路を混合ガスが通過する際に時間的に分離される現象を利用して、多種類のガスの種類と濃度を測定する分析装置をガスクロマトグラフと呼ぶ。一般的には卓上に設置する大型装置で、可搬型も開発されているが、感度や精度に課題がある。
近年の宇宙探査では、月極域の水を含む揮発性物質の存在や、小惑星における水、有機物、揮発性物質の存在が注目されている。また、火星探査においても、NASA(アメリカ航空宇宙局)のキュリオシティ※3の観測により、大気中のメタンや土壌中の有機物が観測されている。一方で、キュリオシティの観測装置は40kg以上と非常に大掛かりな装置であり、このような非常に大型のローバーでないと搭載が難しいのが現状である。 そこで本研究では、当社の革新的な高感度センサ「ボールSAWセンサ※4」と「メタルMEMSカラム※5」を活用して、大きさ100×100×100mm、重さ1kg程度を実現可能な可搬型ガスクロマトグラフの開発を目指す。本センサは、月・火星・小惑星探査においてローバー等に搭載し、表土を採取・加熱し発生するガスや大気のその場での定量測定に使用する。
本研究の成果は、宇宙資源の利用や生命科学の大幅な進展に貢献することが期待される。本研究で開発する高感度・高精度な可搬型ガスクロマトグラフは、宇宙だけでなく、地上利用においても有用。工業、エネルギー、農林水産、ヘルスケアなど、様々な分野における本技術の以下のような社会実装により、安全・安心・クリーンで持続可能な社会の実現が期待されるとのこと。
※3.NASAの火星探査ミッションで用いる宇宙船「マーズ・サイエンス・ラボラトリー」に搭載された全長3m、重量約900kgのローバー(探査車)
※4.球の表面を伝わる特殊なSAW(Surface Acoustic Wave、弾性表面波。固体表面に集中して伝播する振動のこと)。東北大学の山中名誉教授らによって発見された。
※5.MEMS(micro elecromechanical system)と呼ばれる微細加工技術を用いて作製される平板状の小型カラムの素材を、脆くて割れやすいシリコンから強靭なメタルに変えて東北大学で開発された耐久性の高い微細加工カラム
ニュースリリースサイト(Ball Wave):http://ballwave.jp/images/pre_5.pdf
産業用IoTソリューション CONPROSYS(R)から積層信号灯計測機 CPS-PAVシリーズ新発売
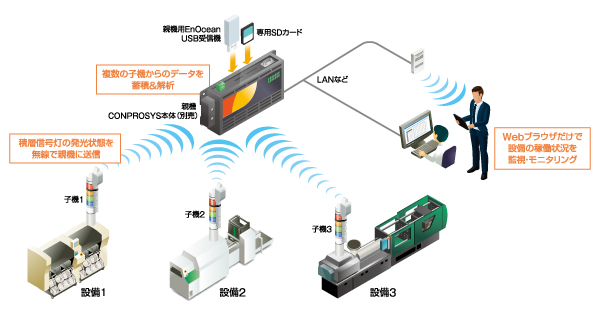
(株)コンテック は、積層信号灯の発光状態を検出する太陽電池式の無線通信モジュールを開発、積層信号灯への後付け装着で設備の稼働監視を簡単に実現する無線IoTセンサ「CPS-PAVシリーズ (以下、新製品)」として2019年11月26日より受注を開始したと発表した。
(画像はシステム構成イメージ)
【製品情報】
種別:親機用セット
型式:CPS-PAV-AES1-JP
機能仕様:専用SDカード、EnOcean規格 USB受信機、子機(CPS-PAV-AE01-JP)
価格(税別):¥64,000
種別:子機
型式:CPS-PAV-AE01-JP
機能仕様:積層信号灯計測機
価格(税別):¥36,000
新製品は、積層信号灯に取り付けて発光状態を読み取る無線IoTセンサ (CPS-PAV-AE01-JP (以下、子機))と、CONPROSYSのコントローラ機器専用USB受信機、機能拡張SDカード、子機1台のセット商品 (CPS-PAV-AES1-JP、(以下、親機用セット)) となる。
ニュースリリース(contec):https://www.contec.com/jp/news/2019/2019112600/
ロボットによる海洋計測(4)

山本 郁夫
3.長崎海洋エネルギー実証フィールドのプロジェクト
長崎は洋上風力発電や潮流発電などの恵まれた海洋エネルギーポテンシャルを有し、2014年に長崎県の海域が国から海洋エネルギー実証フィールドに選定され4)、長崎海洋特区として海洋エネルギーから生み出される新たな産業に期待がかかっている。5)
海洋エネルギーを基盤にすれば、図17に示すような海洋技術クラスター産業が生み出される。6)
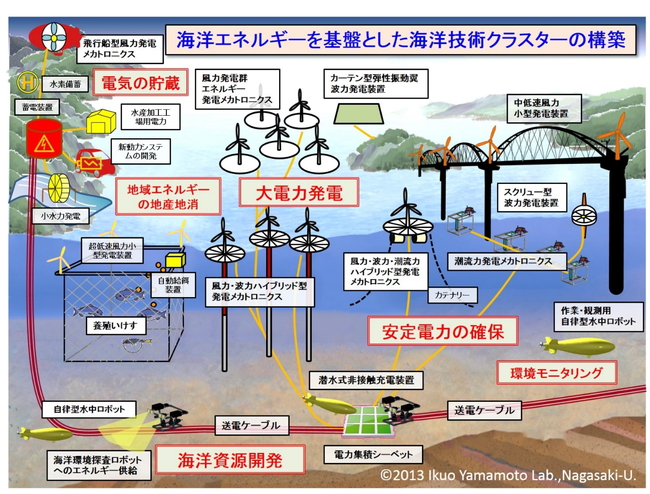
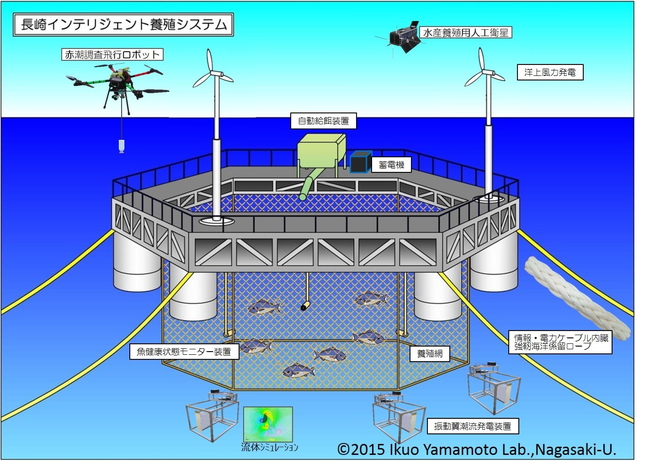
洋上風力発電や潮流発電では施工前の風況や海中海底調査が必要であり、風速計、潮流計、ソーナーなどのセンサをロボット、メカトロニクスに搭載する必要がある。運用時のモニタリングやメンテナンスにもセンサ技術が重要で、遠隔監視カメラや構造物ヘルスモニタリング用センサ搭載のシステムを開発しなければならない。揺れずにメンテナンス船から洋上風車へ移乗できる揺れない移乗機の開発も進んでおり、モーションセンサが制御精度確保のためのキー技術である。また、洋上風力発電や潮流発電の電気エネルギーを給餌装置や魚の生育モニタリング装置に活用するインテリジェント養殖システム(図18)の開発も着々と進んでいる。養殖システム内のモニタリングのみならず、周囲の海域環境を人工衛星や飛行ロボットを用いて、マクロ・ミクロ双方の視点から把握できるシステムも構築されつつある。
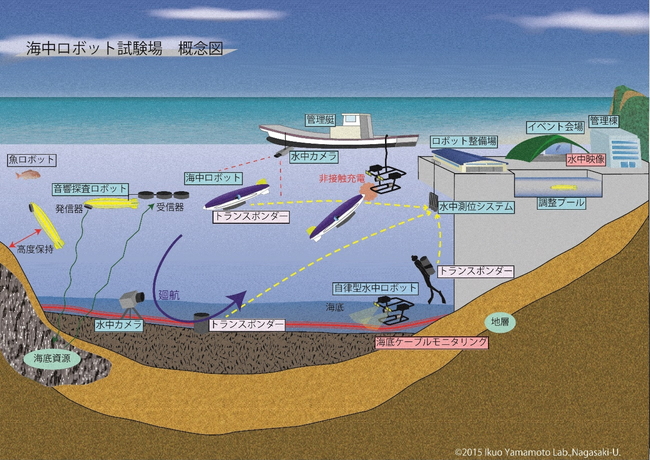
また、係留用ロープも最近では電線入り強靭ロープが開発されており、通信機能を有したインテリジェント化が進んでいくと考えられる。さらに、図19に示すような海中非接触充電によるROV・AUVドッキングシステムにより洋上風車や海底ケーブル点検用AUVの稼働率を向上できるシステムも開発中である。
4.おわりに
ロボットによる海洋計測技術について事例と将来構想を中心に紹介したが、ロボットの主要構成要素であるセンサはますます重要となる。
小型化、軽量、高精度センサが開発されれば海洋計測項目と内容に幅が出てきて、広く海洋IoT技術の発展に寄与できる。
今後もセンサ技術の進展に合わせて、海洋計測に有意なロボットを開発して海洋産業の発展に寄与していきたい。
5.謝辞
本研究の一部は令和元年度総務省戦略的情報通信研究開発推進事業(SCOPE)、および、平成30年度総務省IoTサービス創出支援事業の支援を受けて実施しました。関係各位に感謝の意を表します。
参考文献
4) 森田孝明,長崎県における海洋エネルギー産業の創出に向けた取り組み,沿岸域学会誌,27-3(2014),pp.17-21
5) 山本郁夫,次の産業革命ははじまっている,長崎県工業技術センターだよりCHALLENGE,第184号(2015),p.1
6) 山本郁夫,長崎海洋エネルギー活性化プロジェクト,長崎大学広報誌CHOHO,2015年1月号(2015),p.10
【著者略歴】
山本郁夫(やまもと いくお)
長崎大学副学長・教授
1983年3月 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985年4月 三菱重工本社技術本部、
2004年4月 海洋研究開発機構、
2005年4月 九州大学大学院総合理工学府教授、
2007年4月 北九州市立大学教授、
2013年4月 長崎大学教授、
2019年4月 同大学副学長。
GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業株式会社で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型飛行体や小型水中ロボット、本物そっくりにおよぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでPractical Roboticsの創出法に関する本など多く執筆している。
水中ロボットの測位用センサ(4)
海中観測実装工学研究センター
特任助教 松田 匠未

海中観測実装工学研究センター
准教授 巻 俊宏
4.おわりに
本稿では水中での測位センサについて述べた。水中では電波が使用できず、光や音、慣性を用いて位置を計測する。光は使用できる距離が短く、また音響はノイズが多いなど使用上の制約がある。そのような課題を克服するために我々は複数のセンサを組み合わせて位置を推定する研究に取り組んできた。また最近では複数のロボットが協調することで高精度測位を実現する方法も開発している。開発した技術によって制約の多い水中測位の現状を改善し、水中調査をより身近なものにしたい。
【著者略歴】
松田 匠未(まつだ たくみ)
2012年3月 東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 修士課程修了 修士(環境学)
2012年4月~2015年3月 日本学術振興会 特別研究員
2015年3月 東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 博士課程修了 博士(環境学)
2015年4月~2019年3月 東京大学生産技術研究所 特任研究員
2019年4月 東京大学生産技術研究所 特任助教
現在に至る
・所属学会
IEEE,日本船舶海洋工学会,海洋調査技術学会,日本ロボット学会
・受賞歴
2011年 MTS/IEEE OCEANS 2011 KONA Student Poster Program Second Place Awards
2014年 IEEE OES Japan Chapter Young Researcher Award 2014
・専門分野
知能ロボティクス,フィールドロボティクス,自律型海中ロボット(AUV),マルチロボットシステム,確率ロボティクス
巻 俊宏(まき としひろ)
東京大学生産技術研究所 准教授。
2003年東京大学工学部システム創成学科卒業。
2005年東京大学大学院工学系研究科環境海洋工学専攻修士課程修了、修士(工学)。
2008年東京大学大学院工学系研究科環境海洋工学専攻博士課程修了、博士(工学)。
同年4月東京大学生産技術研究所助教、同年10月〜12月ウッズホール海洋研究所(米国)客員研究員を経て、2010年4月より現職。
専門は海中プラットフォームシステム学。海のフロンティアを拓く岡村健二賞等を受賞。
IEEE, 船舶海洋工学会等の会員。
Blue Economyと日本・スコットランドの協業(4)

松枝 晃
第二回目は、テーマをBlue Economyとして範囲を広げ再生可能エネルギーや養殖漁業等も対象にした。
2018年12月に募集を開始した。
https://www.nippon-foundation.or.jp/who/news/information/2018/20181213-6932.html
2019年2月には、Subsea Expoにおいてワークショップを開きスコットランド側企業に説明を行った。



このSubsea Expoのタイミングで、第一回目採択企業の川崎重工は、AberdeenにKawasaki Subsea UKを設立した。
同社は、2015年にHeriot-Watt大学とAUVの制御に関する共同研究を開始、その後開発ステップの要所でのスコットランド・UKでの実証試験や将来顧客へのデモ、関連企業との対話を行って来た。
当初からスコットランド・北海のSubseaのコミュニティーに加わっての開発であり、現在ビジネス開拓が行われている。早い段階での意思決定が必要になるものの最も効率の良い方法であると考える。
2019年10月9日に横浜に於いて、第二回目5プロジェクトの採択結果を発表した。
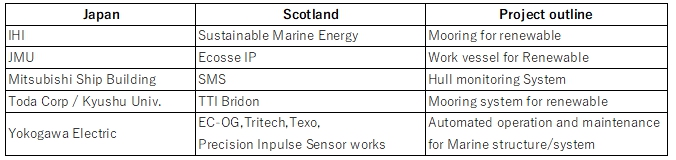
2回目も前回同様、日本側がシステムでスコットランド側がそこに用いるキーソリューションを提供する形となった。再エネ関連のプロジェクトが複数採択されており、日本企業も関心の高い領域である事が分かる。
どのプロジェクトも最長3年間であるが、市場機会の探索も並行して行われる事を期待している。
以上
【著者略歴】
松枝 晃(まつえだ あきら)
英国大使館・スコットランド国際開発庁 上席投資担当官
金沢大学 工学部 電気工学科卒、
1981年オリンパス光学株式会社(当時)。研究開発部門で回路設計、新規事業開拓、オープンイノベーション等経験。
2010年スコットランド国際開発庁。センシング技術を中心に日本スコットランド間の技術案件を担当。2012年から海洋関係。北海のSubsea技術と日本の海洋関連技術のコラボレーションを促進。