東京工業大学 科学技術創成研究院
1.はじめに
現在、世界各地でにおいセンシングシステムの研究が進められている。においセンシングシステムはにおいの種類を識別したりにおい濃度を計測するもので、食品、飲料、化粧品、ヘルスケア、環境計測等が応用分野となる。1) 、筆者はニューラルネットでパターン認識して匂いを識別する方法を共に1980年代に提案し2) , その後多くの研究者がこの分野に参入した3,4) 。現在は、匂いセンサの国際会議(ISOEN: International Symposium on Olfaction and Electronic Noses)も隔年で開催され、2019年は日本で開催された(組織委員長:九州大都甲教授)5) 。 本稿では、においセンサに関する最近の研究を筆者らの研究を中心に紹介する。
2.においバイオセンサ
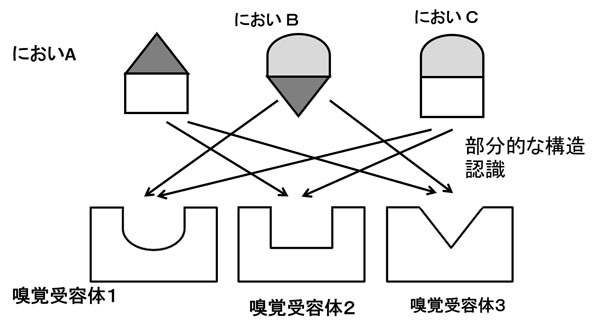
前節でも述べたが、生体嗅覚では多数の嗅覚受容体応答パターンをパターン認識してにおい種類を識別している。その様子を図1に示す。通常、バイオセンサでは抗原抗体反応や酵素基質反応を利用して高い選択性を有するセンサを実現しようとする。しかし、嗅覚受容体は複数の匂い物質に応答するので、多数の嗅細胞の応答パターンをパターン認識してにおい識別を行う。嗅覚受容体はたんぱく質であり、たんぱく質は化学物質の立体化学構造を認識するのに優れている。同図のように部分的な匂い分子形状の情報を中心にして、嗅覚受容体は応答していると考えられる。このように、嗅覚受容体をセンサ素子としてにおいセンシングシステムを構成したものを、においバイオセンサと呼ぶ。
図1.匂い識別の原理
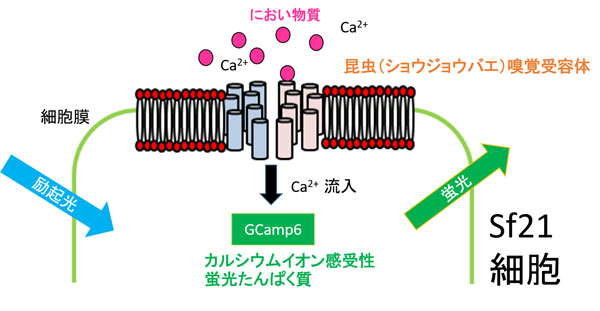
図2に示すように、このセンサ素子はSf21細胞に昆虫(ショウジョウバエ)の嗅覚受容体を発現させたものである6) (東大先端研:神崎亮平教授提供)。細胞の中にCa2+ 感受性蛍光たんぱく質GCaMP6Sを発現させているので、細胞に励起光(488nm: 青色)を照射することにより蛍光(510nm: 緑色)が発生する。Ca2+ 濃度が上昇するとこの蛍光強度は増大する。嗅覚受容体でにおい分子を受容すると、イオンチャネルが開きCa2+ が細胞内に流入して、Ca2+ 濃度の上昇によりGCaMP6sから発生する蛍光強度が増大する。この蛍光強度変化をセンサ応答とする。なお、将来的に気相実験に拡張する予定であるが、現段階では液相測定である。
図2.においバイオセンサ素子の動作原理
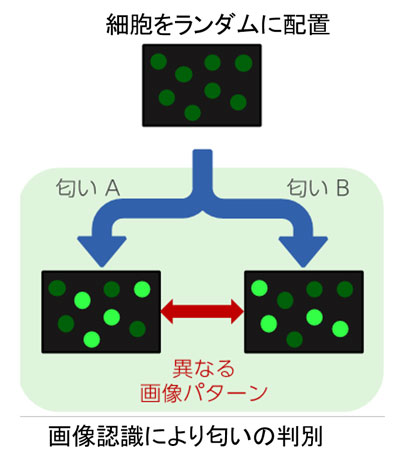
このセンサ素子を用いたにおいセンシングシステムの原理を説明する7, 8) 。 複数の嗅覚受容体細胞を測定チャンバ内にランダムに播種する。そして、におい刺激を与えてその細胞画像をイメージセンサで撮影する。そして、図3に示すように細胞画像をパターン認識することによりにおい認識を行う。
図3.においバイオセンサによるにおい識別の原理
画像の中では、細胞外の場所はにおい識別の情報を含まないために不要であり雑音となる。そこで、まず画像処理により細胞位置を認識し、細胞内の蛍光強度を積分してセンサ素子の応答を得る。この処理を画像内のすべての細胞について行い、多次元ベクトルを構成する。このベクトルの次元数は細胞の数に等しく、数百次元のデータとなる。この応答ベクトルを用いて匂い識別実験を行った。
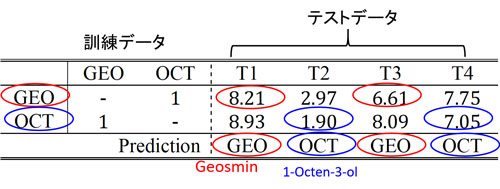
表1.においバイオセンサを用いたカビ臭判別結果 7)
3.電界非対称イオン移動度スペクトロメトリ
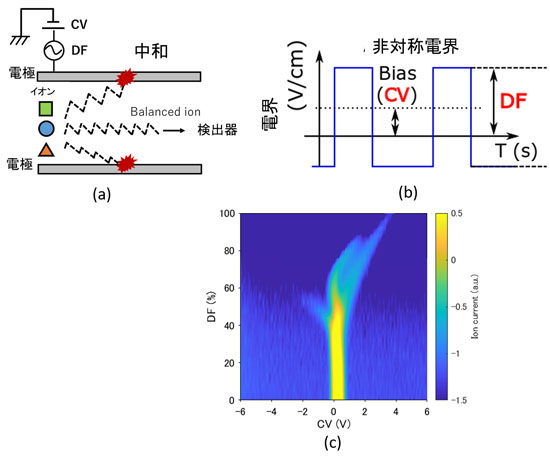
前節とは別のセンサであるが、画像によりにおい計測を行うもう1つの手法を紹介する。この方法はイオン移動度スペクトロメトリの1手法であり、FA IMS (Field Asymmetric Ion Mobility Spectrometry)と呼ばれる。ガス分子をイオン化して電界をかけて、におい分子の種類ごとに移動度が異なることを利用して速度差を検出する。図4(a)にその原理を示す。垂直方向に非対称な高周波交流電界を印加する。イオン化したガス分子は同図のようにジグザグ進行しバランスしたものだけが通過して検出器に到達する。図4(b)に示すように対称なラインからのバイアス分をCV(Compensated Voltage), 正の部分の大きさをDF(Dispersion Field)とすると図4(c)のような画像が得られる。この画像がにおいの種類、濃度によって変るために画像処理によりにおい識別が可能となる。におい識別はガスの種類や濃度により移動度が変ることにもとづいている。FA-IMSは質量分析器のように真空状態を必要とせずに大気状態で計測可能であり微量なガスの計測が可能であるが、質量分析器のように線形重ね合わせが成立しない。
図4.FAIMSの原理.
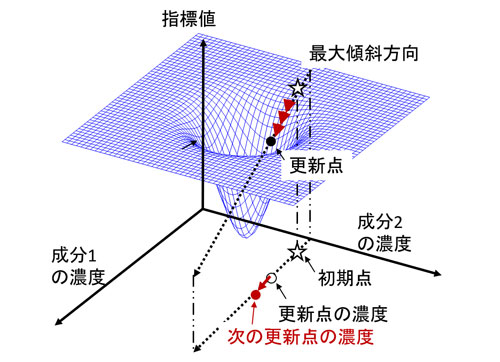
本研究では、FA IMSを用いて混合臭の濃度定量を行った9) 。3成分(アセトン、エタノール、ジエチルエーテル)の混合臭の各成分の濃度を求める。非線形性が強いために重回帰分析やPLS(Partial Least Squares)法などはではなく、非線形最適化の手法を用いる。ここではその中でも基礎的な方法である最急降下法を使用した。図5にその原理図を示す。図5は2成分の場合であり、成分1、成分2の濃度を変化させて指標値を求める。指標値は対象ガスと調合ガスの差分画像の全画素の強度を加算した値であり、対象臭と調合臭が完全に一致した場合は指標値はゼロになる。
図5.FAIMSを用いて混合臭の濃度定量を行う原理
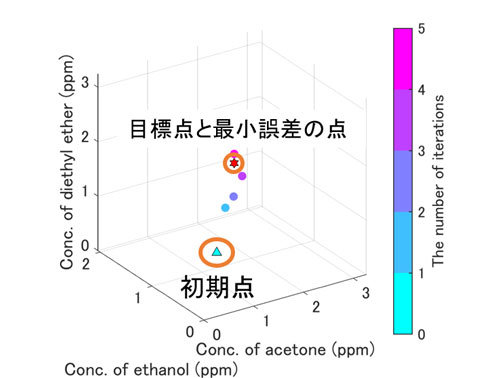
ここでは説明のために濃度指標曲面を書いてあるがその関数を知っている必要はない。現在の場所から指標値が小さくなる方向に周辺のデータから勾配を計算して次の更新点を求め、徐々に指標値が小さくなる方向に移動して最も指標値が小さくなるときの成分1、成分2の濃度を求める。オンラインで逐次探索を行って解を求める手法はアクティブセンシングと呼ばれ10) 、非線形を有したりセンサ応答に経時変化がある時に有効な方法である。また、センサの混合臭に対する応答モデルは不要なために汎用性が高い。さらに、この手法は一般性を有しn成分の混合臭濃度定量に拡張可能である。本研究では3成分の濃度定量を行った。混合臭濃度定量の実験例を図6に示す。同図で当初正解から離れた初期値が与えられたが5回の探索でほぼ正解の各成分濃度に到達することができた。
図6.3成分の混合臭濃度定量の実験例.9)
次回に続く-
参考文献 1) K.C.Persaud and G.Dodd, Analysis of discrimination mechanisms in the mammalian olfactory system using a model nose, Nature, 23 (1982) 352-355.2) T.Nakamoto and T.Moriizumi: Odor sensor using quartz-resonator array and neural-network pattern recognition, IEEE 1988 Ultrasonics symposium, 613-616. 3) Pearce, T.C., Schiffman, S.S., Nagle, H.T., Gardner, J.W. (Eds.). (2003). Handbook of machine olfaction. Weinheim, Germany: Wiley-VCH. 4) T.Nakamoto, Ed., Human olfactory displays and interfaces, IGI-Global, 2013. 5) https://isoen2019.org/ 6) 14) Mitsuno, H., Sakurai, T., Namiki, S., Mitsuhashi, H., and Kanzaki, R.: Novel cell-based odorant sensor elements based on insect odorant receptors, Biosens. Bioelectron., 65, 287–294, (2015).7) Y.Sukekawa, H.Mitsuno, R.Kanzaki, and T.Nakamoto, Odor Discrimination Using Cell-based Odor Biosensor System with Fluorescent Image Processing, IEEE Sensors Journal, 19 (2019) 7192-7200 (オープンアクセス).8) 祐川、光野、神崎、中本、嗅覚受容体発現細胞の蛍光画像を利用したにおいの識別手法の検討、においかおり環境学会誌、50 (2019) 407-415.9) Y.Yokoshiki and T.Nakamoto, On-line Mixture Quantification to Track Temporal Change of Composition Using FAIMS, Sensors, Sensors 2019, 19(24), 5442; https://doi.org/10.3390/s19245442 (オープンアクセス).10) T.Nakamoto, S.Ustumi, N.Yamashita, T.Moriizumi, Y.Sonoda, Active gas/odor sensing system using automatically controlled gas blender and numerical optimization technique, Sens. & Actuators B, 20 (1994) 131-137.
【著者略歴】 中本 高道(なかもと たかみち)
■略歴
■著書
東京農工大学
1.はじめに
人間の視覚に相当するカメラを搭載したロボットは多数存在し、画像に捉えた人物を自動的に認識するなど、視覚を活用して様々な作業を行うことができる。人間の聴覚に相当するマイクロフォンを搭載し、人間が発した音声を自動認識できるロボットも珍しくはない。一方、嗅覚を搭載したロボットは、ほとんど存在しない。その理由は幾つか考えられる。これまでロボット研究は、産業用ロボットの開発を中心に進められてきた。工場で働くロボットに嗅覚は必要ないと思われてきた感がある。カメラやマイクロフォンと異なり、ロボットにすぐに搭載できるような「嗅覚センサ」が市販されていなかったのも一因であろう。
しかし近年、色々な種類のガスセンサが容易に入手できるようになってきた。様々な匂いを識別可能な嗅覚センシングシステムの研究も、着実に進められている1) 。ロボットに嗅覚を持たせることができれば、従来のロボットでは困難であった様々なタスクを行わせることが可能になる。例えば、空港を警備するロボットが、床に落ちているペットボトルをカメラで見つけた場合を考えてみよう。その中に透明な液体が入っていた際に、それが危険な薬物なのか、ただのミネラルウォーターなのか、カメラ画像のみから判断することはできない。しかし、蓋を開けて匂いを嗅げば、内容物が何であるか、調べることができる。また、地雷探知犬や災害救助犬は優れた嗅覚を利用し、地面に埋まった地雷や瓦礫に埋もれた生存者を探し出す。犬のように匂いをたどってその発生源を探索できるロボットが実現すれば、ガス漏れ箇所の自動探索や環境汚染源の特定などにロボットを応用することが可能となる。
本稿では、嗅覚ロボット実現に向けた研究の動向を、筆者らの研究を中心に紹介する。嗅覚を利用して様々な作業をロボットに行わせるためには、検知対象とする匂いやガスを高感度に検出できるセンサが必要となる。しかし、犬と同等の感度や匂い識別能力を持つセンサは、未だに実現されていない。生物嗅覚とガスセンサでは応答速度にも大きな隔たりがあり、生物の嗅細胞の応答速度が0.1秒程度であるのに対し、一般的なガスセンサは応答・回復に数十秒を要する。しかし、たとえ高感度で高速なガスセンサが開発されたとしても、それを単純にロボットに載せるだけで犬のように匂い源を探索できるようになる訳ではない。匂いセンサやガスセンサの開発状況の解説は他稿に譲り、本稿では化学物質を検出するセンサをロボットで活用する手法について概説する。
2.嗅覚を持ったロボットに行わせるタスク
嗅覚を備えたロボットが実現すれば様々な応用が考えられるが、これまでの研究では主に以下の三つの用途が検討されてきた2) 。
(A)地面に残された臭跡の追跡
(A)の臭跡を追跡するロボットは、1994年にRussellの研究グループによって提案された3) 。
餌を発見した働きアリは、餌の一部を巣に持ち帰る際に道しるべフェロモンを地面に残し、他の働きアリを餌の場所まで誘導する。この行動をRussellらはロボットで模倣し、幾つかの応用例を提案している。例えば、大量の荷物を複数のロボットで分担して運ぶ場合に、先頭のロボットが地面に匂い溶液をたらしながら移動する。後続のロボットは、地面から揮発する匂いを手掛かりにし、先頭のロボットの後をついていくことができる。複数のロボットで床の拭き掃除を行う際に、地面に洗剤の匂いが残っていれば、そこは他のロボットが既に掃除したことを意味する。洗剤の匂いがする場所を避けて掃除をするようにすれば、複数の掃除ロボットを容易に協調動作させることができる。しかし、1994年当時と異なり現在では、ロボットの画像処理能力が大幅に向上した。匂いを使わなくても、カメラ画像を用いて互いの位置を確認する方が簡単かつ確実であろう。
(2)のガス源探索ロボットは、空気中を漂うガスの分布をたどって、その発生源の位置を突き止める。一般に、空気中におけるガス分子の拡散速度は非常に遅く、メタンのような小さな分子であっても、計算上は1時間に50 cm程度しかガスが広がらない2) 。煙突から放出された煙が風にたなびくように、発生源から放出された匂いやガスの分子は主に気流に運ばれて空気中を広がり、プルームと呼ばれる帯状の分布を風下方向に形成する。屋外、室内を問わず現実環境における気流はほとんどの場合に乱流となっており、風速や風向が不規則に変動する。したがって、図1に示す煙のように、ガスの分布も不規則に蛇行し、その形は時々刻々と変化する。地面に残された動かない臭跡をたどるのは比較的容易であるが、空気中をたなびくプルームをたどるのは、非常に困難である。
図1 風にたなびく煙
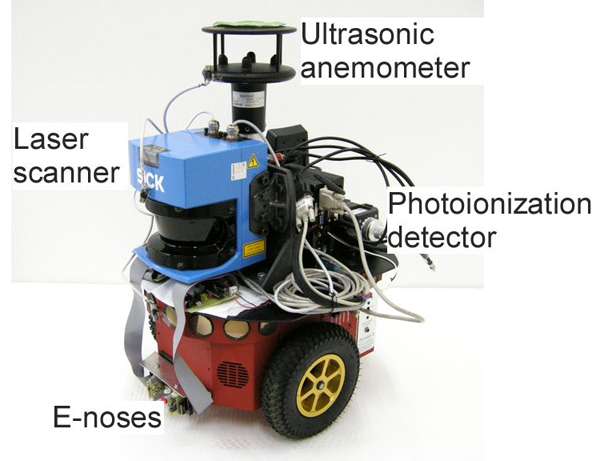
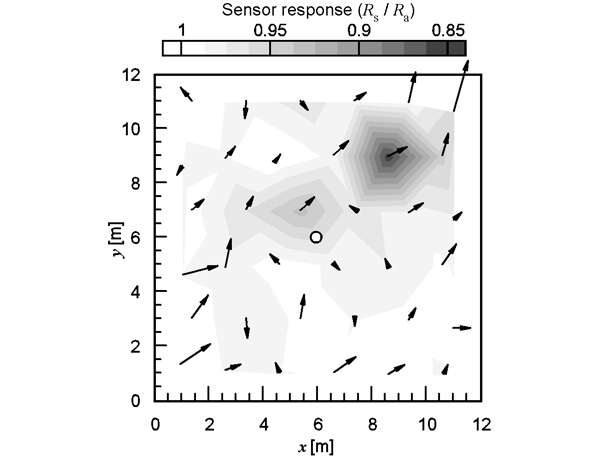
一方、(C)の匂い・ガスの空間分布を計測するロボットは、容易に実現できる。図2に示すロボットは、9種の半導体ガスセンサからなるe-nose(electronic nose)を搭載し、検出したガスの種類を識別することができる4,5) 。また、二次元超音波風向風速計を搭載し、ガスを運んできた気流の速さと向きを測定できる。このロボットを用い、周囲に障害物のない開けた屋外で、ガス濃度分布を計測した結果を図3に示す。12 m四方の領域の中央に液体のエタノールを入れたシャーレを置いてガス源とし、2 mおきに設けた36個の測定点にロボットを移動して測定を行った。ガスセンサの応答値は、ガス中におけるセンサの抵抗値Rsを清浄空気中における抵抗値Raで規格化した値であり、ガス濃度が高くなるほど応答値は小さくなる。矢印で表した風速ベクトルを見ると、風向や風速が大きく変動していることが分かる。その結果、シャーレから揮発したエタノールガスも広範囲にまき散らされているが、等高線図で表したガスセンサ応答を見ると、概ね図の右上に向かってエタノールガスが広がっていることが分かる。汚染物質の広がりを確認する際などに、このようなロボットを活用できるものと期待される。
図2 ガスセンサと風速計を備えた移動ロボット4) より転載)
図3 屋外で測定したガス濃度分布と風速の分布4) より転載)
しかし図3を見ると、中央にあるガス源よりも右上にずれた位置で最も高いガス濃度が検出されている。このように、ガス濃度分布からガス源の位置を正確に判定することができない場合もある。理論的にはガス源の位置でガス濃度が最大となるが、図3に示した実験では、ガス源が地面に置かれているのに対し、地表から少し離れた高さでガス濃度を測定している。また図3では、各測定点で得られたガスセンサの応答値を補間して等高線図を描いている点にも注意が必要である。2 mおきに設定した測定点の間にガス源が置かれているが、風向によってはプルームがガス源に近いセンサの間を通り抜けてしまい、風下側に離れたセンサで大きな応答が観測されることがある。ガス源の位置を正確に突き止めるためには、工夫が必要となる。
次回に続く-
参考文献 1) F. Röck, N. Barsan, and U. Weimar, Chem. Rev., 108, 705–725 (2008)2) H. Ishida, Y. Wada, and H. Matsukura, IEEE Sensors J., 12, 3163–3173 (2012)3) R. Deveza, D. Thiel, A. Russell, and A. Mackay-Sim, Int. J. Robot. Res., 13, 232–239 (1994)4) Y. Wada, M. Trincavelli, Y. Fukazawa, and H. Ishida, Proc. Int. Conf. Adv. Mechatronics, 183–188 (2010)5) M. Trincavelli, M. Reggente, S. Coradeschi, A. Loutfi, H. Ishida, and A. J. Lilienthal, Proc. IEEE/RSJ Int. Conf. Intell. Robots and Syst, 2210–2215 (2008)
【著者略歴】 石田 寛(いしだ ひろし)
■略歴