取締役 長坂 宏
5.圧力センサ(変換器)
機械式圧力計は1700年代 ヨーロッパでの産業革命以降から使用され段階的な改良が進められ、それ以降、現在に至っても安定的な需要を維持している。
一方、圧力センサは半導体製造プロセスを利用した構成・構造を適用することによって1980年代以降、急速に発展を遂げてきた。
圧力センサ(変換器)は圧力によって変化する基本要素は機械式と類似であるが、これを電気的な信号に変換して信号処理する機能が付加できる。
また、半導体製造プロセスを利用して小型化が出来る特徴がある。
ここでは検出原理の異なる4種類の圧力センサについて解説する。

5.1歪ゲージ型(圧力センサ)
歪みとは、物体の長さLと伸縮量ΔLの比ΔL/Lによって定義される 物体のわずかな伸縮を示す物理量である。
物体の歪みを検出するには、その表面に歪ゲージを取付けるか作り込むかして、歪みを電気抵抗の変化などに変換する。半導体製造プロセスで使用されているシリコンを材料として用いる場合は、薄肉化したシリコンダイアフラムの上に不純物を拡散して歪ゲージを形成する方法が一般化している。
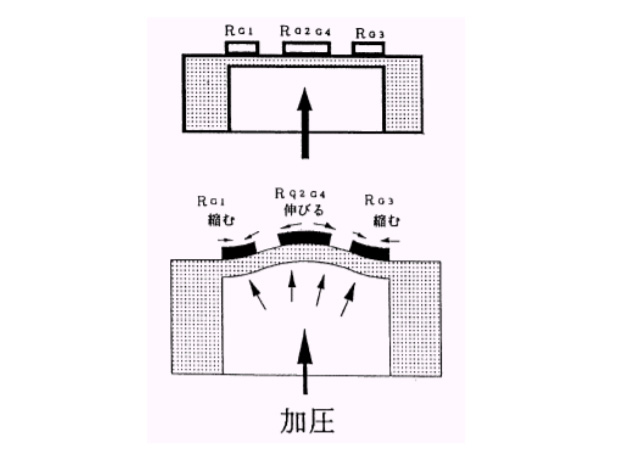
ダイアフラムに圧力を印加するとダイアフラム上の特定場所に引張り歪と圧縮歪が発生する。図5-1。
歪ゲージはこれを検出するために最適な形状に加工(パターン化)し最適な位置に配置される。
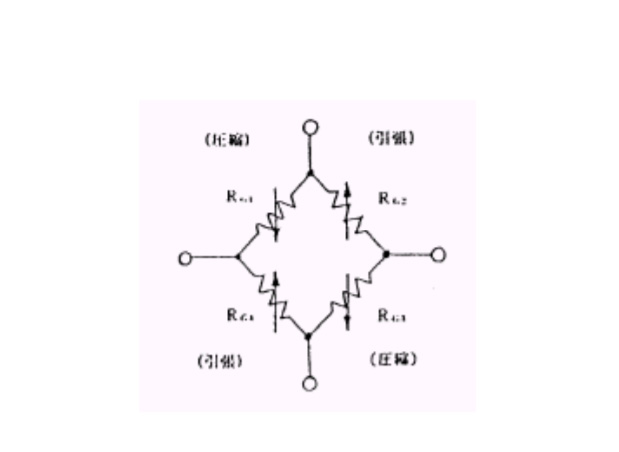
歪みゲージはホイートストンブリッジ回路として構成すると歪ゲージの温度特性などを補償できることや電圧(電位差)として出力することができる。図5-2。
金属の圧抵抗率
普通、金属性歪ゲージの電気抵抗の変化は主に機械的な力を加えたことによって生じる幾何学的な変化によるものである。しかし、圧抵抗効果が小さいとはいえ、無視できないことが多い。無視できない場合、長さと断面積から導出される次の簡単な抵抗の式を使うことによって計算することができる。
R=ρ*L/S (ρ:電気抵抗率、L:導体の長さ、S:導体の断面積)
一部の金属は、幾何的な要因による抵抗変化よりもずっと大きい圧抵抗率を示す。 例えばプラチナ合金では、圧抵抗率は2倍大きく、幾何効果を加えると歪ゲージの感度を幾何効果だけの場合と比べて3倍以上まで高めることができる。 純粋なニッケルの圧抵抗率は~13倍大きく、幾何誘導された抵抗変化を完全に矮化してしまう。
半導体の圧抵抗効果
半導体の圧抵抗効果は幾何効果よりも数桁大きくなることが特徴であり、 ゲルマニウムや多結晶シリコン、アモルファスシリコン、シリコンカーバイド、単結晶シリコンなどのような物質に見られる。この現象は印加された応力によって結晶格子に歪が生じて半導体中のキャリアの数や移動度が変化するためである。 この効果によって非常に高い感度の半導体歪ゲージが作れる。一般的に金属歪ゲージと比較して、半導体歪ゲージは環境条件(特に温度)に敏感なため、扱うのが難しい。
尚、シリコン材料のゲージファクター(感度)は大多数の金属と比較して2桁大きい。
図5-1-3はシリコン基板中に半導体シリコン製歪ゲージを作り込んだセンサ素子である。このタイプのセンサ素子は民生用として広く利用されている。

薄膜歪ゲーシの場合には、非金属もしくは金属のダイアフラムの上に電気絶縁層を作り、さらにその上にシリコンの薄膜を蒸着させて歪ゲージを形成する方法がよく用いられる。金属ダイアフラム+シリコンの例を図5-1-4に示す。
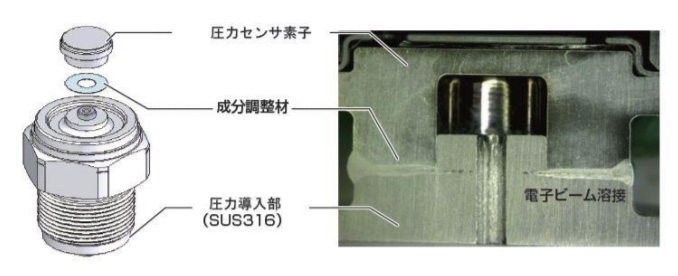
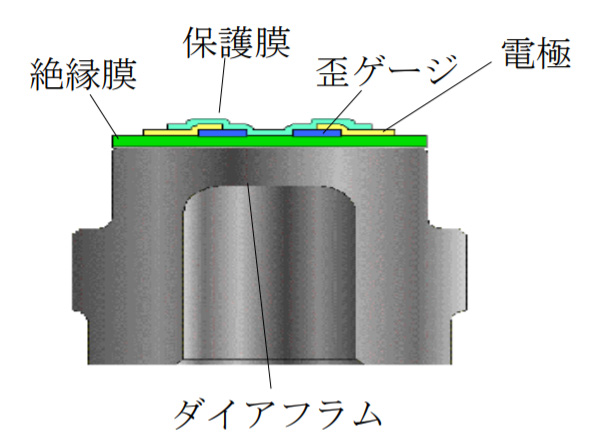
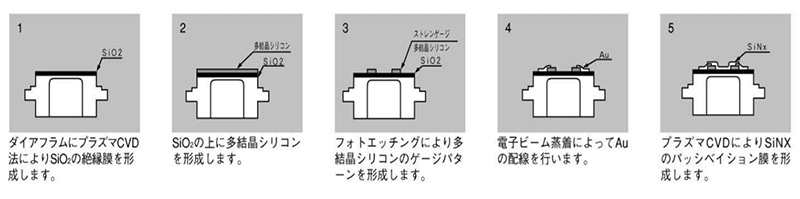
図5-1-4はその外観、図5-1-5はセンサ構造(断面)である。また、このセンサを作成するためのプロセス(工程)を図5-1-6に示した。
金属ダイアフラム(通常ステンレススチール)上に二酸化シリコンの絶縁膜を形成し、その上にシリコンの薄膜を蒸着する。さらに、この薄膜をフォトエッチングにより歪ゲージを形成する。次に電子ビーム蒸着により金の配線を、プラズマCVD(化学的気相成長法)により保護用の窒化シリコン膜を形成する。この構造は、流体に接する部分がステンレスなので耐蝕性に優れていること、製作できる圧力範囲が広いことといった特徴がある。
これらはいずれもシリコン半導体製造技術を応用したものである。

5.2静電容量型
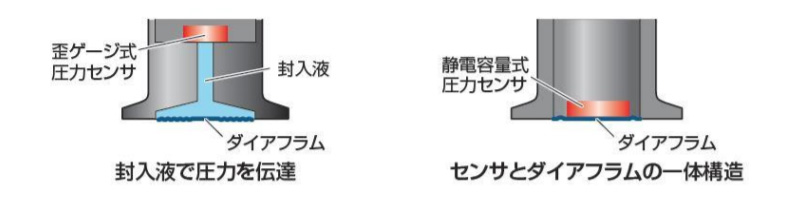
圧力の変化に応じて変形するダイアフラムの変位量を静電容量の変化として計測し,圧力に換算する方式のセンサ素子である。ダイアフラムの変位量から圧力を直接計測する構成である。
静電容量式圧力センサの原理を図5-2-1に示す。静電容量は対向する2枚の電極の間に発生する。その大きさは電極間媒質の誘電率と電極の面積が一定ならば、電極間の距離に依存する。印加された圧力に応じて電極間の距離が変化し、発生する静電容量も変化するのでこれを検出すると圧力の程度を知ることができる。
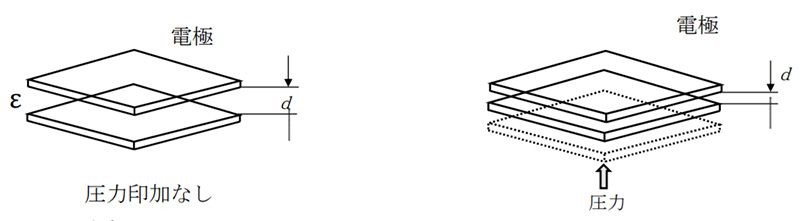
C = εS/(d-ω) ω = P/K
ここで、ω は電極間の媒質の誘電率、Sは固定電極の面積、dは無圧力時の電極間距離、ω は圧力Pにおけるダイアフラムの変位量、K はダイアフラムのバネ定数である。
上記の式から圧力に応じた静電容量変化が検出できる。この静電容量変化は圧力Pに対して比例関係にはならないが、後段の電子回路によって補正、調整することが可能である。
静電容量式圧力センサ素子の構造を図5-2-2に示す。マイクロマシニング技術を使用して、厚さ数μm~数十μmのダイアフラムをエッチング加工したシリコン板と、金属薄膜を形成したガラスを陽極接合等を用いて貼り合せた構造である。
シリコンには適切な不純物を導入することによって導体とすることができる。シリコン製ダイアフラムは圧力によって変位する可動電極として機能する。この時、ガラスに形成した金属薄膜は圧力によって変位しない固定電極となるのでシリコン製ダイアフラムからなる可動電極との間には静電容量の変化が生ずる。
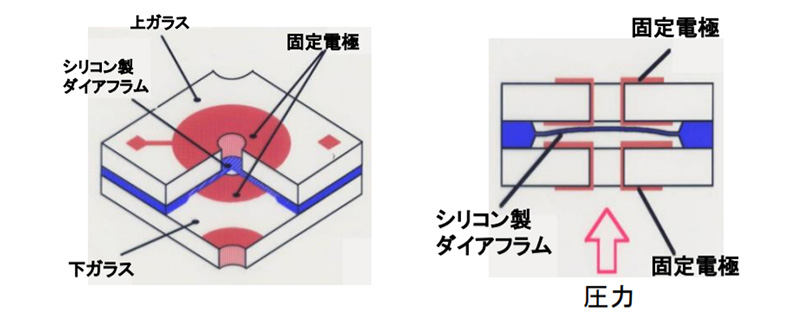
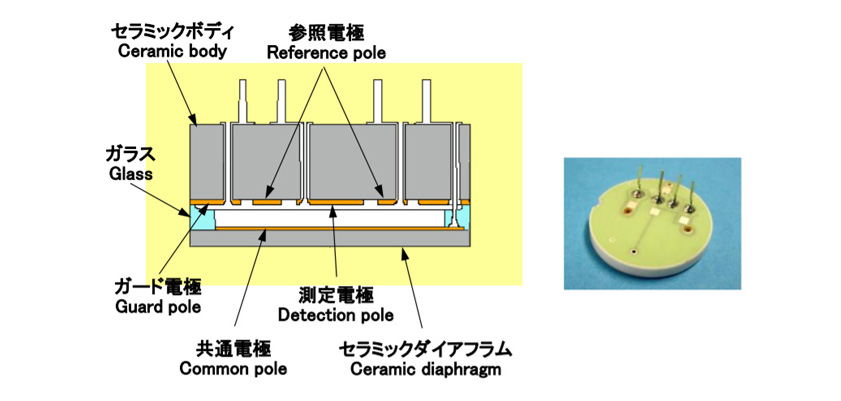
図5-2-3はアルミナ製セラミックスを用いた静電容量式圧力センサである。
製法は主に厚膜印刷技術を利用して製作する。この構造では圧力印加部分と電極が絶縁体であるセラミックスで絶縁されているので、導電性の圧力媒体の計測も可能となる。
5.3振動型
梁などの固有振動数が軸力によって変化することを圧力計測に利用する場合、たとえば圧力をダイアフラムで受けて力に変換し、振動子に軸力を加えると圧力の程度によって振動子の固有振動数を変化させることができる。このような振動子を設計することによってセンサに応用できる。この原理を応用し、これまで金属や水晶を利用した振動子で圧力センサを製作した例がある。
梁(図1)による振動の古典計算を示す。
弾性梁の固有振動数fは、その材質と形状、張力によって決定される。
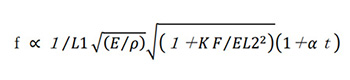
L1,L2:梁の代表寸法
ρ:密度
E:縦弾性係数
F:軸力
α:温度係数
t:温度
K:定数
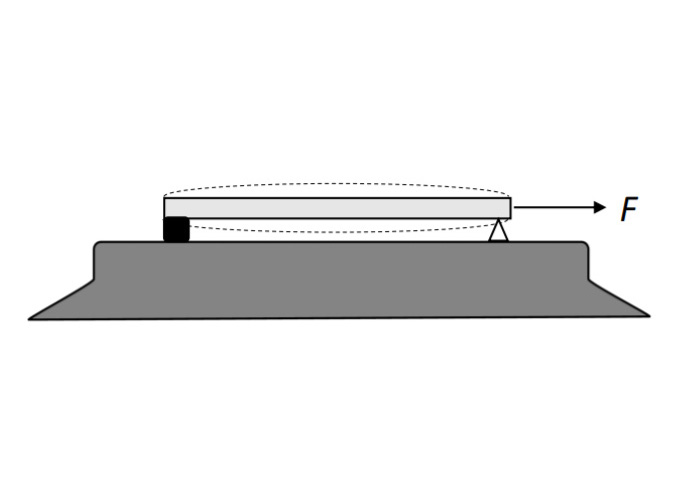
その例を図5-3-2に示した。
シリコン基板上に異方性エッチングで薄肉部(ダイアフラム)を形成し、そのダイアフラム上にドームを形成して真空室を作り、その中に四端固定の振動子を形成してある。
圧力を印加するとダイアフラム表面の振動子の固有振動数が変化する。それに伴い出力電圧と周波数が変化する。
このセンサ素子は3次元マイクロ加工技術を使用して、数mm角の単結晶シリコンを加工した後、ダイアフラムの表面に振動子を作り込んでいる。振動子はH字状となっている。このセンサ素子を使用した圧力伝送器の長所は、静圧および片側過大圧に強く、長期間ゼロ点変動が生じない。
5.4光ファイバー(FBG)型
光ファイバーを利用した圧力計測は数種類あるが、ここではFBGセンサ(ファイバーブラッググレーティングセンサ)について解説する。
FBGセンサは、ひずみを計測するために使用されるが、温度、加速度、変位など、多種類のセンサも簡単に接続できる利点がある。また、従来の電気式センサとは異なり、光ファイバー式ひずみゲージは電気を必要としない。1本のファイバーを介して伝播する光を利用する。したがって、センサは電磁波干渉の影響を受けない特徴がある。
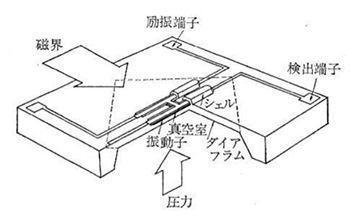
図5-4-1は、FBGセンサの構造を示すものです。光ファイバーのコア部に周期的な屈折率の変化を形成すると、回折格子(グレーティング)として機能するので、ブラッグの反射条件を満たす波長(ブラッグ波長式(1))の光を反射する。
λ =2 n Δ …式(1)
λ=ブラッグ波長、n=コアの屈折率、Δ=回折格子の格子間隔(グレーティング周期)
ブラック波長は、光ファイバーの温度とひずみによって変化するが、その値はおよそ10pm/℃と1.2pm/με(波長が1550nmのとき)となる。
図5-4-2は、FBGセンサの波長変化を模式的に表したものである。光ファイバーに伸びが加わると、式(1)におけるΔが増加し、ブラッグ波長が長くなる。逆に、光ファイバーが縮むと、Δも減少し、ブラッグ波長は短くなる。
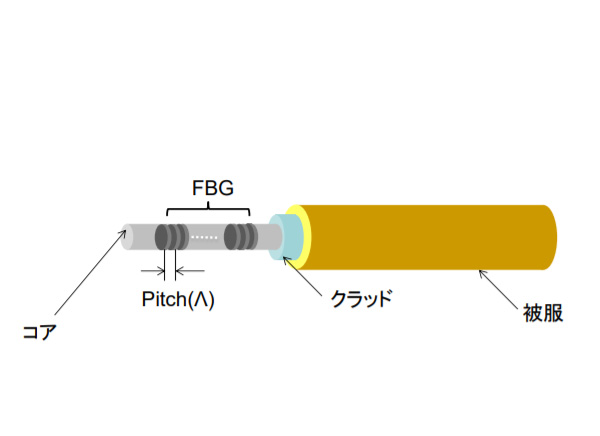
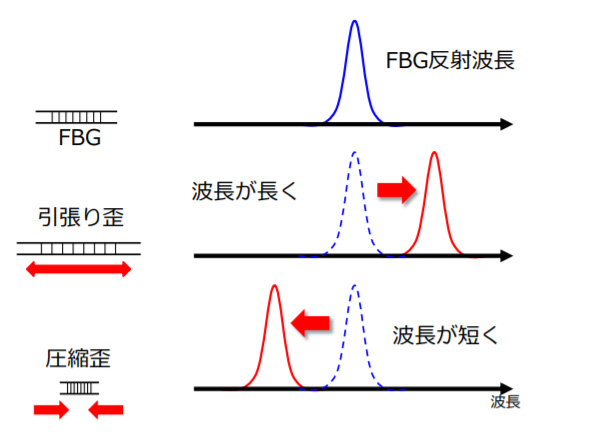
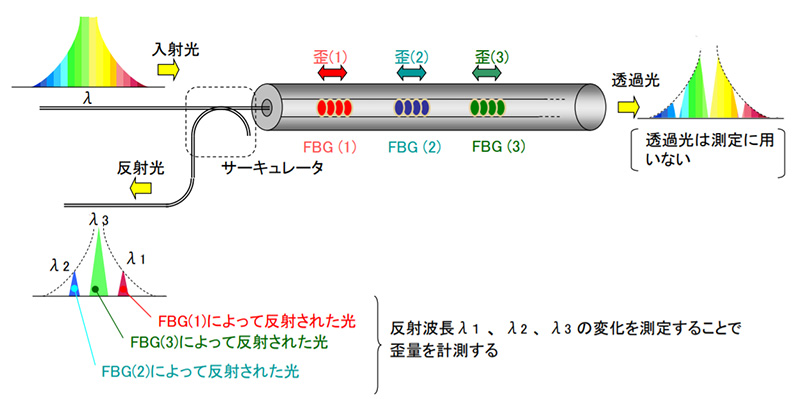
図5-4-3は、光ファイバーに3つの異なるグレーティング周期を持つFBGセンサを形成し、広帯域なスペクトルを持つ光を入射したときの模式図である。3つのブラッグ波長の光が反射されるが、それ以外の波長の光は透過する。このように、1本の光ファイバーに異なる反射波長を持つFBGセンサを形成することで、多点計測が可能となる。
FBGセンサは通常、歪を検出したい箇所に接着などで固定して使用する。
参考文献
3) 振動式センサ 1989.6計測と制御 Vol.28
【著者紹介】
長坂 宏(ながさか ひろし)
長野計器(株)取締役
■略歴
1982年 株式会社長野計器製作所(現 長野計器株式会社)入社
圧力センサ研究・開発業務に従事
2020年 同社 営業企画本部 取締役 現職