センサイト協議会
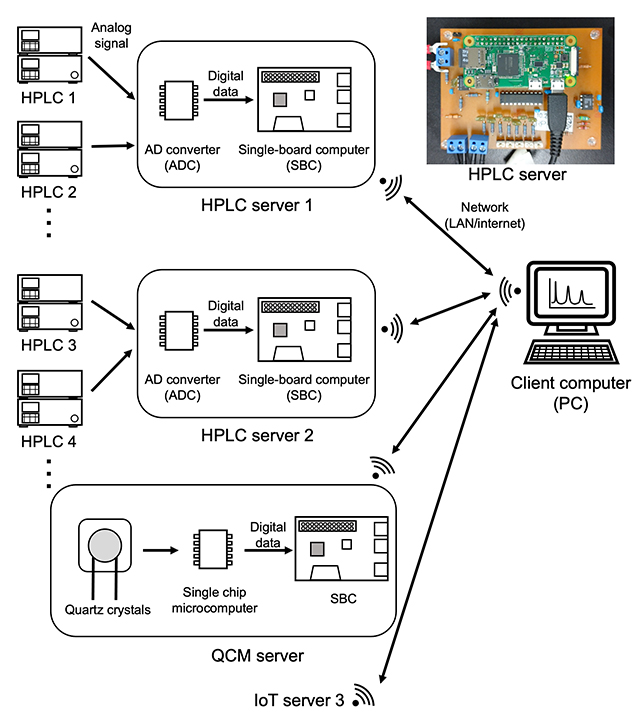
〔1〕特定の場所の人の「密」を検知し遠隔地に知らせるセンサを試作する
【概要】
※計測された数値は、インターネット上でやり取りされるため、世界中のどこでも、インターネット接続さえあれば、それを知らせ、集計することができます(今後のプログラムの拡張次第です)。また、人が密になって危険な数値になった場合は、その場所の「密アラーム」を出すこともできます(これも、今後のプログラムの拡張次第です)。また、AWSなどのクラウド上にサーバーを別途用意し、そこで動くソフトウエアを開発し、用意すると、数台から数万台の世界各地に散らばった同センサの統計処理も可能です。統計データが集まれば、人が密になる場所の予測などをAIで行うことも可能になります(別途AIソフトウエアの開発が必要)。
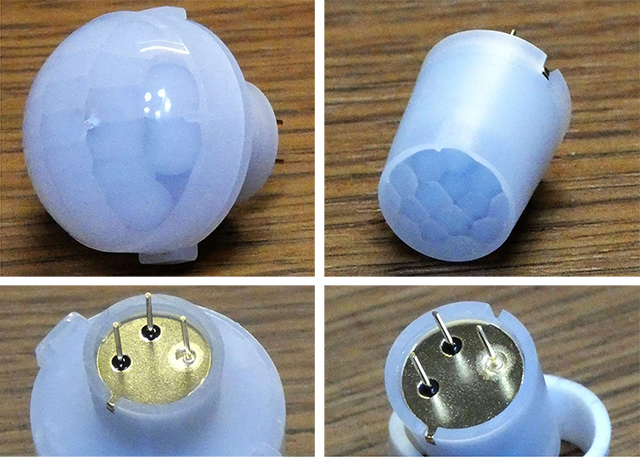
※センサは「焦電センサ」と呼ばれる「人体の体温付近を選択的に取得する赤外線センサ」を使うため、センサそのものの価格が低廉(ホームセンターなどで売っているトイレなどの照明の自動点灯につかわれています)で、カメラなどを使う方式とは違い、プライバシーにも配慮がされています。
【特徴】
【試作品の製造コスト概算】
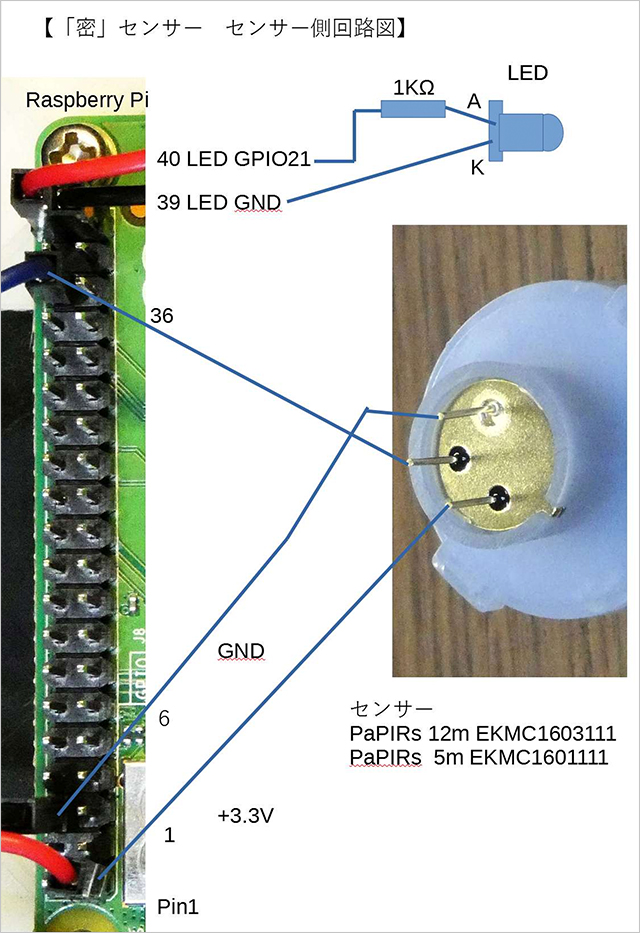
1.人感センサ(約500円)
以上、人件費を除いた部品代合計は、¥4,400-(量産時は、さらに個々の部品の数量値引きがあるかと思います)
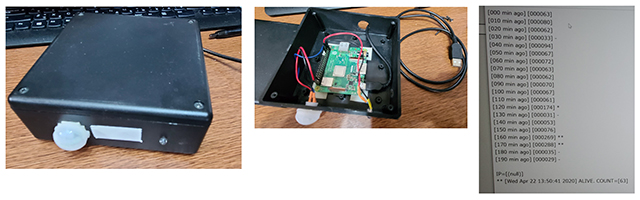
以下、試作品の写真です。ご覧のように、コンピュータに更に小さいものを使うことによって、更に小さなものにできます。消費電力も更に小さくできます。現在の消費電力は5V/0.1Aです。
※一番右の写真は、試作の簡易型ではありますが、メールで10分ごとに送られてくる画面で、メール到着時点から、190分前までの人の動きが見られます。現在のところ、1年間の稼働で問題なく動いています。このインターバルの時間はプログラムで設定できます(試作プログラムの場合)。
【センサ側回路図】
【プログラム利用・改造・発表・商用利用は自由です】
※本ハードウエアの回路図、及びプログラムの改変、改造を歓迎します。
ちなみに、本試作プログラムとハードウエアでは
【センサ側プログラム(サンプル)】
●Raspberry Pi内でコンパイルするときの簡単なコンパイル用シェルスクリプト
cc xxxx.c tcpcli.c -o xxxx -lwiringPi
●メインプログラム(xxxx.c)
#include <stdio.h>
#include <wiringPi.h>
#include <unistd.h>
#include <signal.h>
#include <stdlib.h>
#define PORT (27)
#define LED (29)
#define IPADDR "192.168.1.4" // IP Address for Server. Please change this value.
#define TCPPORT (9022)
#define BUFFER_SIZE (2048)
#define MAX_COUNT (10000)
#define FETCH_TIME (600)
#define NOCNT "NOCNT\0"
#define CNT_BUFFER_SIZE (100)
#define LEDON (1)
#define LEDOFF (0)
// #define DEBUG 1
int timeover = 0;
extern void ClientSendData(char *,char *,int);
void timeisover()
{
timeover = 1;
}
#if 1
void LEDAction(void)
{
int fret;
if(0 > (fret = fork())) // fork Error
exit(1);
else if (0 < fret) // Parent
{
(void)signal(SIGCHLD,SIG_IGN);
return;
}
else if(0 == fret) // Child
{
digitalWrite(LED,LEDOFF);
delay(300);
digitalWrite(LED,LEDON);
exit(0);
}
}
#else
void LEDAction(void)
{
digitalWrite(LED,LEDOFF);
}
#endif
int main(void){
int data,datap,i;
#ifndef DEBUG
if(0 != fork())
exit(0);
#endif
if(0 > wiringPiSetup())
{
printf("No wiringPi.\n");
return 1;
}
pinMode(PORT,INPUT);
pinMode(LED ,OUTPUT);
datap = digitalRead(PORT);
i = 0;
#ifdef DEBUG
printf("Now Status=[%d]\n",datap);
#endif
(void)signal(SIGALRM,timeisover);
alarm(FETCH_TIME);
timeover = 0;
ClientSendData("00000\0",IPADDR,TCPPORT); // Send Activated Sign for the Server.
digitalWrite(LED,1); // Connection OK. LED ON.
for(;;){
if(timeover)
{
char bufx[CNT_BUFFER_SIZE + 2];
sprintf(bufx,"%05d\0",i); // Counter Value writeout.
i = 0; // Counter Reset.
ClientSendData(bufx,IPADDR,TCPPORT); // Send Data to Server.
#ifdef DEBUG
printf("SEND[%s]\n",bufx);
#endif
(void)signal(SIGALRM,timeisover); // Set next signal.
alarm(FETCH_TIME); // Set next fetch time.
timeover = 0; // Reset TIMEOUT flag.
continue;
}
data = digitalRead(PORT);
if(datap != data)
{
char buffer[BUFFER_SIZE +2];
datap = data;
if(data != 0)
{
i++;
#ifdef DEBUG
printf("[%06d]GPIO%d = %d\n",i,PORT,data);
#endif
LEDAction();
}
}
}
return 0;
}
●メインプログラム内部で使われているサーバーとの通信部分のプログラム(tcpcli.c)
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <ctype.h>
#include <errno.h>
#include <sys/types.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <netdb.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
/* Global valiables */
struct sockaddr_in client_addr; // write socket
/*
Connect to Server
*/
int ConnectServer(char *ipaddr, int port)
{
int sockfd; // Listen Socket File Descripter
if(0 > (sockfd = socket(PF_INET, SOCK_STREAM,0))) // Make Socket
{
perror("reader: socket");
return (-1);
}
bzero((char *)(&client_addr),sizeof(client_addr)); // clear struct for read
client_addr.sin_family = PF_INET; // set value to struct
client_addr.sin_addr.s_addr = inet_addr(ipaddr); // set value to struct
client_addr.sin_port = htons(port); // set value to struct
if(0 > connect(sockfd,(struct sockaddr *)(&client_addr),sizeof(client_addr)))
{
perror("Client: Cannot Connect\n");
close(sockfd);
return (-1);
}
return sockfd;
}
/*
Send Data to Server
*/
int SendDataToServer(int fd,char *data,int datalen)
{
if(0 > write(fd,data,datalen))
{
perror("Client: Cannot Send.\n");
close(fd);
return (-1);
}
return datalen;
}
/*
Client systen Send Data
*/
int ClientSendData(char *bufx,char *ipaddrx,int portx)
{
int sockax;
int len;
char cntbuff[256];
if(0 > (sockax = ConnectServer(ipaddrx,portx)))
{
printf("CLIENT: Cannot Connect Server.\n");
return(-1);
}
len = strlen(bufx);
sprintf(cntbuff,"%-6d\0",len);
SendDataToServer(sockax,cntbuff,CNTLEN); // Send Data Length.
SendDataToServer(sockax,bufx,len); // Send data.
close(sockax); // Close Socket.
return len;
}
※コンパイル時に若干Warninngが出ます。これは、TCP/IPのライブラリの新旧によるもので、通常は問題なく動きますが、問題がある場合はWarninngが出た部分を書き換えてください。
【サーバー側プログラム(サンプル)】
●コンパイルのためのシェルスクリプト
cc xxxx.c tcpserv.c -o xxxx
プログラムは「xxxx.c」と「tcpserv.c」、出来上がるバイナリプログラムは「xxxx」です。
●メインプログラム(xxxx.c)
※ヘッダの部分は各自の環境に合わせて書き換えてください。望むべくは、外部パラメータにして、設定するように、プログラムを書き換えたいですが、今回は緊急なので、エッセンスをわかっていただくためにも、簡単なプログラムにしています。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <time.h>
#include <string.h>
// #define DEBUG 1 // If debug, Set 1
#define PORT (9022)
#define LOW_VALUE (45)
extern int ServerInit(int);
extern int WaitIncomming(int);
extern void ServerReadDatas(char *,int);
extern char *AcceptedIP;
#define BUFFER_SIZE (2048)
#define FETCH_TIME (600) // fetch time is 1-min
#define HTML_FILE "/var/www/xxxx/human/index.html" // Result HTML file
#define HTML_URL "http://xxxx.or.jp/human/index.html" // Result HTML URL
#define EMAIL_FILE "/home/xxxx/human/email" // Email text temporaly file
#define TO_LINE "To:%s\n"
#define TO_ADDRESS "xxxx@xxxx.com" // Email Send to xxxx@xxxx.com
#define FROM_LINE "From:%s\n"
#define FROM_ADDRESS "yyyy@yyyy.com" // Email From Address
#define SUBJECT_LINE "Subject:%s\n"
#define SUBJECT "Human Moving Report"
#define NOCNT "NOCNT\0"
#define NOT_ACTIVE (2)
#define ACTIVE (500)
#define CNTBUF_NUM (20)
#define BAR_LEN (100)
#define BAR_RATE (100)
#define NETSTAT_FILE "/home/xxxx/human/netstat.txt" // Netstat temporaly file
#define NETSTAT_COMMAND "/bin/netstat -t -n | /bin/grep 192.168.1 | /bin/grep %d > %s"
int cntbuf[CNTBUF_NUM];
void Clearcntbuf(void)
{
int i;
for(i = 0 ; i < CNTBUF_NUM ; ++i)
cntbuf[i] = 0;
}
// SendEmail Real
/*
Send E-Mail
*/
void SendEmail(char *body)
{
FILE *fp;
FILE *fpin;
int i;
char EmailCommandLine[BUFFER_SIZE + 1];
if((FILE *)NULL == (fp = fopen(EMAIL_FILE,"w")))
{
printf("Cannot open Email File[%s]\n",EMAIL_FILE);
exit(1);
}
sprintf(EmailCommandLine,NETSTAT_COMMAND,PORT,NETSTAT_FILE);
system(EmailCommandLine);
if((FILE *)NULL == (fpin = fopen(NETSTAT_FILE,"r")))
{
printf("Cannt Open NETSTAT_FILE[%s]\n",NETSTAT_FILE);
exit(1);
}
fprintf(fp,TO_LINE,TO_ADDRESS);
fprintf(fp,FROM_LINE,FROM_ADDRESS);
fprintf(fp,SUBJECT_LINE,SUBJECT);
fprintf(fp,"\n\n");
for(i = 0;i < 100 ; ++i)
{
char *pp;
char NetstatLine[BUFFER_SIZE];
if((char *)NULL == fgets(NetstatLine,BUFFER_SIZE,fpin))
{
fclose(fpin);
break;
}
else
{
fprintf(fp,"%s",NetstatLine);
}
}
fprintf(fp,"\n\n");
fprintf(fp,"%s\n\n%s\n\n.\n\n",body,HTML_URL);
fclose(fp);
sprintf(EmailCommandLine,"/usr/sbin/sendmail %s < %s",TO_ADDRESS,EMAIL_FILE);
system(EmailCommandLine);
}
// Send Email Interval
void SendEmailInterval(int mincnt)
{
char buffern[BUFFER_SIZE + 2];
char *p;
time_t now;
char *nowtime;
(void)time(&now); /* Get time for now */
nowtime = ctime(&now); /* convert to strings */
for(p = nowtime ; (*p) != (char)0 ; p++)
if((char)('\n') == (*p))
{
*p = (char)0;
break;
}
#ifdef DEBUG
printf("[%s] Count=%d in %d sec.\n",nowtime,mincnt,FETCH_TIME);
#endif
if(NOT_ACTIVE > mincnt)
sprintf(buffern,"[%s] NOT-ACTIVE: X In %d sec. there are %d actions.\n",nowtime,FETCH_TIME,mincnt);
else if(ACTIVE > mincnt)
sprintf(buffern,"[%s] ----ACTIVE: *** In %d sec. there are %d actions.\n",nowtime,FETCH_TIME,mincnt);
else
sprintf(buffern,"[%s] EXT-ACTIVE: ***** In %d sec. there are %d actions.\n",nowtime,FETCH_TIME,mincnt);
SendEmail(buffern);
}
// Make Web Pages
void MakeWebPage(int cnt_fetch)
{
FILE *fp;
time_t now;
char *nowtime;
char *p;
int i;
for(i = (CNTBUF_NUM - 1) ; i > 0 ; --i)
cntbuf[i] = cntbuf[i - 1];
cntbuf[0] = cnt_fetch;
if((FILE *)NULL == (fp = fopen(HTML_FILE,"w")))
{
printf("Cannot open FILE[%s]\n",HTML_FILE);
exit(1);
}
fprintf(fp,"\n");
fprintf(fp,"\n");
fprintf(fp,"Human Alive Check \n");
fprintf(fp,"\n");
fprintf(fp,"\n");
(void)time(&now); /* Get time for now */
nowtime = ctime(&now); /* convert to strings */
for(p = nowtime ; (*p) != (char)0 ; p++)
if((char)('\n') == (*p))
{
*p = (char)0;
break;
}
for(i = 0 ; i < CNTBUF_NUM ; ++i)
{
int blen;
char bar[BAR_LEN + 2];
int ix;
if(LOW_VALUE >= cntbuf[i])
{
bar[0] =(char)('-');
bar[1] =(char)0;
}
else if(BAR_RATE > cntbuf[i])
{
bar[0] = (char)0;
}
else
{
blen = cntbuf[i] / BAR_RATE;
for(ix = 0 ; ix < blen ; ++ix)
{
bar[ix] = (char)('*');
}
bar[blen] = (char)0;
}
fprintf(fp,"[%03d min ago] [%06d] %s
●通信部分プログラム(tcpserv.c)
/* TCP Server */
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <ctype.h>
#include <errno.h>
#include <sys/types.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <netdb.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <malloc.h>
int writer_len; // Data Write Length
struct sockaddr_in reader_addr; // read socket
struct sockaddr writer_addr; // write socket
int readedbytes;
int readbytes;
char *p;
char AcceptedIP[256];
#define CNT_BYTES (6)
#define TESTPORT (8001)
/*
Read specified bytes from client
*/
void ReadBytes(int fd,char *buff,int bytes)
{
int readbytes;
int readedbytes;
char *p;
p = buff;
readbytes = bytes;
readedbytes = 0;
bzero(buff,bytes);
for(;;)
{
if(0 > (readedbytes = read(fd,p,readbytes)))
{
printf("ReadError in Line %d.\n",__LINE__);
}
if(bytes > readbytes)
{
p = p + readedbytes;
readbytes = readbytes - readedbytes;
}
else
break;
}
}
/*
Server Ready
*/
int ServerInit(int port) // return Socket
{
int yes = 1;
int usv;
int sockfd;
if(0 > (sockfd = socket(PF_INET, SOCK_STREAM,0))) // Make Socket
{
perror("SERV: reader: socket");
return -1;
}
bzero((char *)(&reader_addr),sizeof(reader_addr)); // clear struct for read
reader_addr.sin_family = PF_INET; // set value to struct
reader_addr.sin_addr.s_addr = htonl(INADDR_ANY); // set value to struct
reader_addr.sin_port = htons(port); // set value to struct
setsockopt(sockfd,
SOL_SOCKET,SO_REUSEADDR,(const char *)&yes,sizeof(yes)); // Set Socket options
if(0 > bind(sockfd,(struct sockaddr *)(&reader_addr),sizeof(reader_addr))) // set bind
{
perror("SERV: reader: bind");
return -1;
}
if(0 != listen(sockfd,50)) // wait the connection
{
perror("SERV: reader: listen");
close(sockfd);
return -1;
}
return sockfd;
}
int WaitIncomming(int waitsock)
{
int new_sockfd;
writer_len = sizeof(writer_addr);
if(0 > (new_sockfd = accept(waitsock,(struct sockaddr *)(&(writer_addr)),(socklen_t *)(&(writer_len)))))
{
perror("SERV: reader: accept");
return(-1);
}
bzero(AcceptedIP,255);
// (void)strcpy(AcceptedIP,(char *)inet_ntoa(writer_addr.sin_addr));
return new_sockfd;
}
void ServerReadDatas(char *DataBuffer,int fda)
{
int cnt;
int len;
char counter[CNT_BYTES+2];
ReadBytes(fda,counter,CNT_BYTES);
counter[CNT_BYTES]=(char)0;
len = atoi(counter);
ReadBytes(fda,DataBuffer,len);
DataBuffer[len] = (char)0;
}
※プログラム内にコメントアウトした行、デバッグメッセージなどが残っています。
次回に続く-
【著者紹介】 三田 典玄(みた のりひろ)
■略歴
■知見