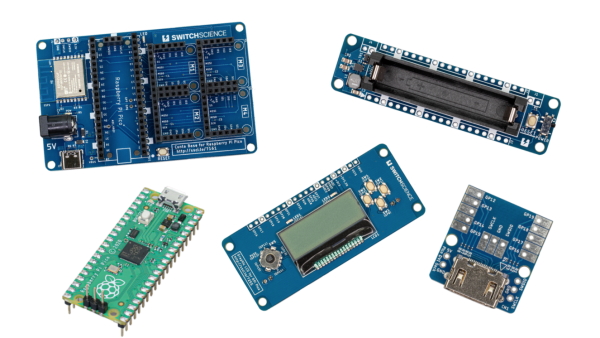
(株)スイッチサイエンスは、 Conta 規格の小型基板をRaspberry Pi Picoに繋ぐためのベースボード「Raspberry Pi Pico用 Conta™ベースボード」と、「Raspberry Pi Pico(ピンヘッダ実装済)」を、スイッチサイエンスのウェブショップにて2021年11月17日より販売開始した。
また、低消費電力なモノクログラフィック液晶基板を搭載した「Raspberry Pi Pico用小型グラフィック液晶ボード」、HDMIのような形状のコネクタにDVI-D出力できる「Raspberry Pi Pico用DVIアダプタ基板」、Raspberry Pi Picoの幅に収まる単4電池電源基板「Raspberry Pi Pico用電池駆動基板」も近日中に販売開始する。
●Raspberry Pi Pico用 Conta™ベースボード(ESP-WROOM-02搭載)
センサなどを乗せたConta規格(※)の小型基板(Contaモジュール)を、Raspberry Pi Picoに繋ぐためのベースボードです。最大四つのモジュールを同時接続できる。ベースボード上にWi-Fiモジュール「ESP-WROOM-02」(シリアル接続)を搭載しているので、Raspberry Pi Picoに無線 LANを追加できる。
Contaモジュールとベースボードは、I2C・SPI・アナログ入力/デジタル入出力(汎用IO)による接続が可能で、複数のモジュール、複数のインターフェースが共存可能。
▶︎ 「Raspberry Pi Pico用 Conta™ベースボード(ESP-WROOM-02搭載)」基板仕様
- Contaモジュールコネクタ × 4(M1~M4のU字のコネクタ1組で1モジュール分)
- Contaモジュールコネクタの 5 V ピンはRaspberry Pi Pico及び電源コネクタから供給
- 各 I/Oピンは 3.3V駆動(Raspberry Pi Picoに直結)
- Wi-Fi モジュール「ESP-WROOM-02」搭載(Raspberry Pi Picoとはシリアル接続)
- 5V入力電源コネクタ装備(DCジャック、USB Type-C)
- ベースボードの全ての部品は実装済み
●Raspberry Pi Pico(ピンヘッダ実装済)
Raspberry Pi Picoにピンヘッダを実装した製品。ブレッドボードにて抜き差ししやすいよう、2 x 20ピンには細めのピンヘッダを実装している(デバッグ端子3ピンは通常の太さのピンヘッダ)。
●Raspberry Pi Pico用小型グラフィック液晶ボード
Raspberry Pi Pico用の低消費電力なモノクログラフィック液晶基板で、画面サイズは28.1mmx9.1mm、解像度は128 × 48ピクセル。
▶︎ 「Raspberry Pi Pico用小型グラフィック液晶ボード)」基板仕様
- 小型グラフィック液晶 (AQM1248)
- 4方向ジョイスティック (押し込みスイッチ付き)
- タクトスイッチ x 4
- LED x 2 ( 赤、緑 1個づつ )
- リセットボタン
- 電源入力端子( 2.3V~5.5V )
- 基板サイズ : 76.2mm x 33.02mm
●Raspberry Pi Pico用DVIアダプタ基板
Raspberry Pi PicoのGPIOをHDMIのような形状のコネクタに出力できる変換基板で、Pico-DVI-Sock(※)をスイッチサイエンスで製品化したもの。Raspberry Pi Picoを直接はんだ付けしたり、ピンソケットとピンヘッダを使って接続して利用する。
※ https://github.com/wren6991/pico-dvi-sock
●Raspberry Pi Pico用電池駆動基板
Raspberry Pi Pico の幅に収まる単4電池電源基板。ローム社製DCDCコンバータ「BU33UV7NUX」で3.3Vに昇圧するので、NiH充電池にも対応している。
※ 基板上のコネクタは未実装のため、用途に合わせて実装する必要がある。
▶︎ 「Raspberry Pi Pico用電池駆動基板」基板仕様
- 単4電池バッテリーホルダー搭載(入力:0.6V ~ 3.3V)
- BU33UV7NUXによる昇圧回路搭載(出力:3.3V/500mA max)
- 電源スイッチ搭載
- Raspberry Pi Pico 用リセットボタン搭載
- 電源出力専用端子搭載
- 基板サイズ:76.2mm x 20.32mm
*「アンテザード自律航法(UDR:Untethered Dead Reckoning)」、測位衛星の電波受信が困難な場所で、速度パルス(車速信号)などを接続しなくても自律航法ができる技術。
*「自動車用推測航法(ADR:Automotive Dead Reckoning)」、車両走行中、トンネルなどGPSの電波が届かない位置に差し掛かった際に最後の位置から自動車の進行方向・速度から現在地を算出する技術。
*1: https://www.u-blox.com/en/product/neo-m9v-module ※URL表示先は英語
Robert Sparrow, The March of the robot dogs, Ethics and Information Technology, Volume 4, pp. 305–318, 2002.
Katie Engelhart, “What Robots Can -and Can’t- Do for the Old and Lonely: For elderly Americans, social isolation is especially perilous. Will machine companions fill the void?” New Yorker, May 15, 2021.
■著書・連載
理系科学英語 徹底トレーニング [ロボット工学],(監修),アルク
私の修行時代,「修行時代の出会いを生かす」,(分担),弘文堂
いざ国際舞台へ! 理工系英語論文と口頭発表の実際,(共著),コロナ社
国際舞台で“結果を出す” テクニカルイングリッシュの心得第1回〜12回,日本機械学会誌 2018年,Vol.121, No. 1190~1201連載
“Virtual Emotion for Robot – Towards Human Support Robot,” Uehiro-Carnegie-Oxford Conference: Ethics and the Future of Artificial Intelligence, 2018.
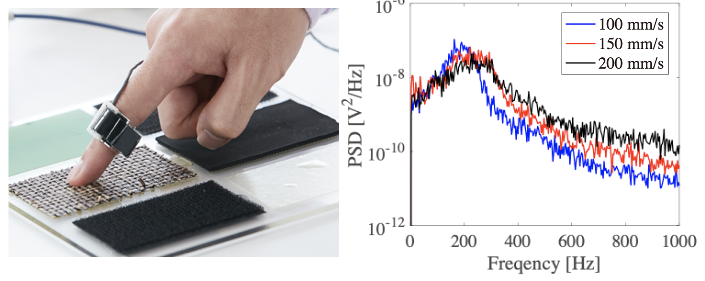
Y. Tanaka, D. P. Nguyen, T. Fukuda, A. Sano, Wearable skin vibration sensor using a PVDF film, Proceedings of the 2015 IEEE World Haptics Conference, pp. 146-151 (2015).
K. Kimura M. Natsume, Y. Tanaka, Influence of scanning velocity on skin vibration for coarse texture. Proceeding of the EuroHaptics 2018, pp. 246-257 (2018).
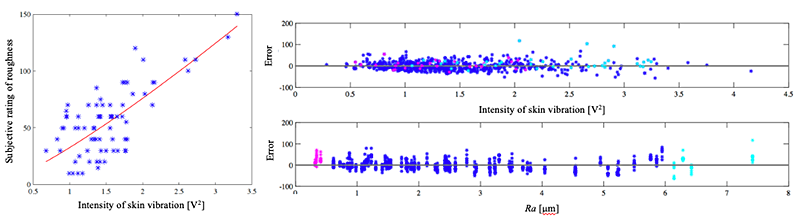
M. Natsume, Y. Tanaka, W. M. Bergmann Tiest, A. M. L. Kappers, Skin vibration and contact force in active perception for roughness ratings, Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication, pp. 1479-1484 (2017).
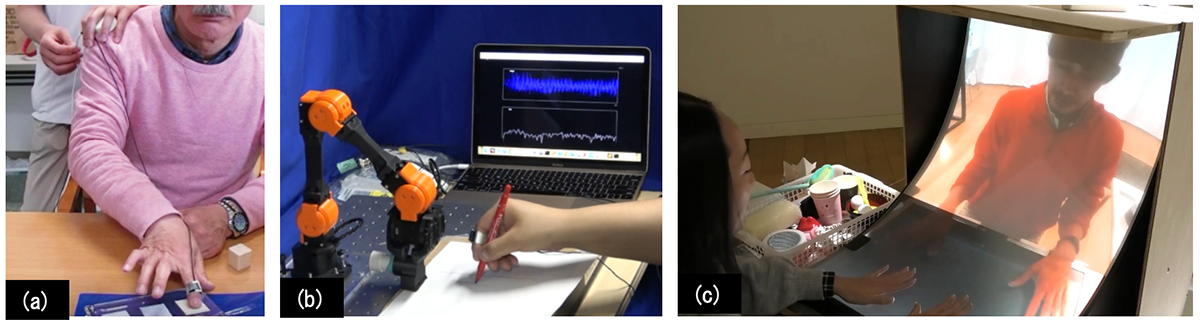
K. Katayama, M. Pozzi, Y. Tanaka, K. Minamizawa, D. Prattichizzo, Shared haptic perception for human-robot collaboration, Proceedings of the EuroHaptics Conference, pp. 536-544 (2020)
Y. Tanaka, S. Shiraki, K. Katayama, K. Minamizawa, D. Prattichizzo, Bilaterally shared haptic perception for human-robot collaboration in grasping operation, Journal of Robotics and Mechatronics, 33(5), pp. 1104-1116 (2021).
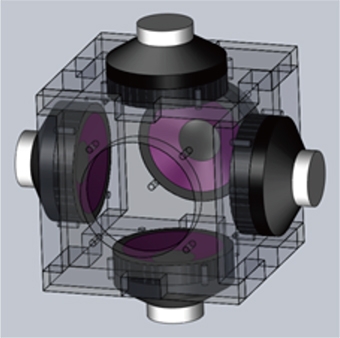
R. Sodhi, I. Poupyrev, M. Glisson, A. Israr: AIREAL: interactive tactile experiences in free air, ACM Transactions on Graphics, Vol32, Issue 4, No.134, pp.1-10, 2013.
H. Takahashi, S. Bando, K. Oiwa, A. Nozawa, T. Ishikawa, M. Mitsui: Measurement of Psychophysical Quantities of Air-Flow Stimulus, Transactions on Electrical and Electronic Engineering, Vol.12, Issue S1, pp.5183-5184, 2017.
K. Miura, T. Ishikawa, T. Itoigawa, M. Mitsui, A. Nozawa: Psychological and Physiological Responses to Airflow Stimuli: Differences in Responses based on Sex and Targeted Body Site, International Journal of Industrial Ergonomics, Vol.68, pp.176-185, 2018.