
ポストLEDフォトニクス研究所
江本 顕雄
センシングシステム研究センター
福田 隆史
1.はじめに
近年、偏光を利用した画像計測は、フラットパネルディスプレイ分野の製品検査を中心に、必須の技術となっている。これらの分野においては、高性能化および高機能化に加えて、製品製造現場での検査ラインに組み込むためのモジュール化の研究開発が望まれており、新規の検出原理から実践投入までを視野に入れたアプローチが必要となっている。
本稿では、まず前半に我々が開発した「高速・高解像の2次元複屈折プロファイラ―」に関して紹介する。これは、偏光計測の分野でしばしば問題となる機械的な回転操作を排除した、ユニークな複屈折位相差のイメージング技術であり、高分子材料を用いた製品の検査等に有望であると考えられる。後半には、当該分野の更なる技術発展を目指して、我々が近年開発した2種類の偏光機能性素子に関して、その応用展開等を含めて紹介する。
2.回転操作不要の偏光顕微鏡「複屈折プロファイラ―」
2.1 複屈折プロファイラ―の原理
一般的に偏光状態の測定とは、任意の偏光状態の楕円軌跡と回転方向を決定することに相当する。そして、その楕円の軌跡を特定するためには、少なくとも3つの方位角における光強度を測定する必要がある。しかしながら、同時にこの3つの方位角成分を抽出する検光子は存在しない為、結果として何らかの回転操作が必要となり、同時に測定時間が長くなる。この問題を解決するために、被測定光を分割したり1)、検光子の配置を工夫する2)などの多様なアプローチが提案されており、それぞれの方式の長所・短所を踏まえて、適材適所の応用が進んでいるのが実態と言える。我々は、偏光顕微鏡の原理に基づいた複屈折位相差の測定方式における、煩雑な回転操作と後段の情報処理の排除を目的とし、回転操作不要の偏光顕微鏡といえる、「複屈折プロファイラ―」を開発した。以下にその原理を示す。
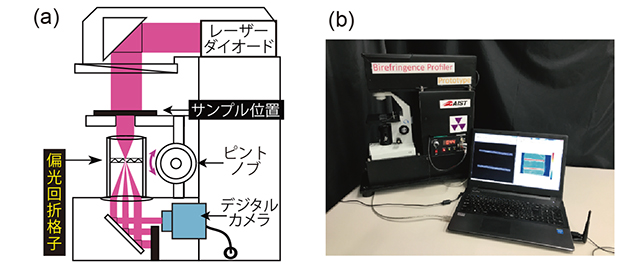
図1(a)に示す様に、分子配向やサブ波長格子等が発現する屈折率の異方性(複屈折Δn)において、その方向が面内で回転しながら周期性を形成するとき、これは特殊な偏光回折格子となる。これらの偏光回折格子は、主として光誘起異方性媒質中での偏光ホログラム形成として研究されている3,4)。この回折格子は、図1(b)に示す様に、入射光の偏光状態に依存した非対称な回折を生じる。例えば、+1次光に注目すると、左回り円偏光が入射した場合には回折光強度が最小となる。この状態から、入射光の位相差(あるいは楕円率)が変化すると、その変化量に応じて回折光強度が増加する。このとき回折効率は、入射光の楕円率のみに依存し、楕円の向きには依存しない。図1(c)のように、2枚のレンズを用いた結像系を構築し、レンズ系中央にこの回折格子を配置することで、その偏光特性を複屈折測定に応用することができる。
具体的には、まずレーザー光の偏光状態を左回り円偏光調整する。サンプル位置に何も置かない場合や等方性の媒質が置かれている場合には、偏光状態に変化は無いため、デジタルカメラで検出される像は暗いままである。一方で、サンプル位置に複屈折分布を持つ試料が置かれた場合には、図1(b)の特性に基づいて回折光強度が変化し、その複屈折位相差の分布に応じた回折像がデジタルカメラによって検出されることになる。即ち、複屈折の2次元分布を、光強度の2次元分布に変換して検出できることとなる。回折特性が楕円偏光の向きに依存しないことと、入射光に円偏光を用いていることから、試料面内のいかなる方向を向いた複屈折も、その複屈折位相差の大きさに対応した光強度として検出されるため、まさに「回転操作不要の偏光顕微鏡」であり、図1(b)の特性に基づいて定量的に位相差を測定可能な、高速・高解像の2次元複屈折イメージング技術となる5)。
2.2 複屈折プロファイラ―構成
前述の光学系をより実践的に構築すると、例えば顕微鏡タイプの場合、図2のような構成が可能となる。この時、空間分解能は10µm程度であり、微小領域を高解像で観察できる。他にも多様な構成が利用できるが、ここで特筆すべきは、LEDのようなインコヒーレントな光源とカメラレンズによる結像系も利用可能な点であり6)、これにより利用用途や適用分野は大きく拡大できると予想される。
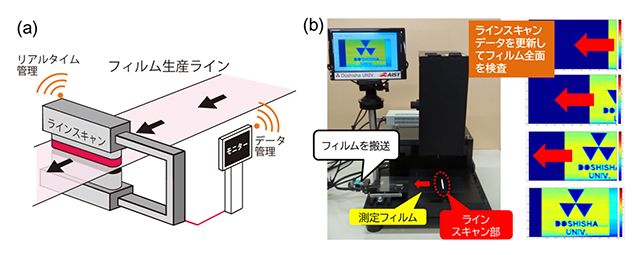
また、図3(a)に示すようなフィルム検査向け用途を考えた場合には、スリット状の光源を備えた、図3(b)のような構成が可能となる。更に、前述のスリット状の光源を用いる場合には、偏光回折格子の回折角における波長分散を利用して、多波長同時計測が可能となる。複屈折の波長分散が無視できる測定対象の場合には、使用波長が、検出可能な位相差(リタデーション)のダイナミックレンジに直接的に関係する。結果として、短い波長の光による高感度測定と、長い波長の光による広ダイナミックレンジ測定が選択あるいは併用可能となり、全面に及ぶ機能的かつ高精度なフィルム検査が可能となる。
2.3 複屈折プロファイラ―のよる観察例
身の回りには複屈折を有する多くの物質やこれによる製品があり、それらを観察あるいは検査する装置として複屈折プロファイラ―は有効的なツールの一つとなる。例えば、フィルムの検査においては、キズ・ブツおよび厚さのムラなどを検出可能である。また、近年のコロナ感染拡大で、必須の身の回り品となったマスクを構成する不織布も、繊維質の組み合わせやバインダーの有無に至るまで、鮮明なイメージングが可能となる(図4(a))。このほかにも、図4(b)に示す機能性繊維や、その他食品および結晶体など、実に多様な対象物を、高速・高解像にイメージング可能である7-9)。
![図4 (a)不織布および(b)機能性繊維素材の観察例 (カラーバーは複屈折位相差[rad]を表す)](https://sensait.jp/wp-content/uploads/2021/11/emoto_04.jpg)
(カラーバーは複屈折位相差[rad]を表す)
また、高速性を生かして、材料変化のダイナミクスを追跡する物性研究等にも適用可能と思われる。実際に我々は、図5に示す様に、グルタミン酸ナトリウムの高濃度溶液において、時間変化に伴って晶析が進行する過程を、in-situで追跡して実証している。本例は、比較的ゆっくりと進行する反応であるが、図1(c)に示した装置構成の通り、応答速度はデジタルカメラの撮像速度によって直接的に決まるため、高速カメラと組み合わせることで、多様なダイナミクスを捉えることが可能と考えられる。
![図5 グルタミン酸ナトリウム水溶液からの晶析の観察例 (カラーバーは複屈折位相差[rad]を表す)](https://sensait.jp/wp-content/uploads/2021/11/emoto_05.jpg)
(カラーバーは複屈折位相差[rad]を表す)
2.4 まとめ
特殊な偏光素子の回折特性を利用して、2次元の複屈折分布を2次元の光強度分布に変換する「高速・高解像の複屈折プロファイラ―」に関する概要を紹介した。簡便な構成で、顕微鏡のように直感的な観察・イメージングが可能となるため、高精度測定に限らず生産現場での品質管理等、多様な応用展開が期待できる。今後は、対応波長を拡張し更なる用途拡大を検討する予定である。
最後に、本研究の一部は、著者の前所属である同志社大学と産業技術総合研究所との共同研究によるものであり、共同研究者および協力者の皆様に感謝の意を申し上げます。
次回に続く-
参考文献
- 特開2006-071458
- 特開2007-263593
- L. Nikolova and P. S. Ramanujam, “Polarization Holography,”Cambridge University Press, 2009, Cambridge.
- 小野浩司“偏光伝播解析の基礎と応用”内田老鶴圃(2015).
- WO2016/031567
- 特開2019-100862
- 小川拓真,高橋尚暉,中島亮平,江本顕雄,福田隆史, “2次元複屈折分布の高速・高解像イメージング技術” オプトロニクス社,Optronics, No.7, pp.133-138, 2017.
- 小川拓真,宮坂建,江本顕雄,福田隆史, “フィルム検査向け2次元複屈折プロファイラーの実用化の検討” 加工技術協会,コンバーテック,vol. 538, pp.106-110, 2018.
- 福田隆史, 江本顕雄,中島亮平,小川拓真,“光学樹脂の屈折率、複屈折制御技術”技術情報協会 (2017) 12章2節.
【著者紹介】
江本 顕雄(えもと あきら)
徳島大学 ポストLEDフォトニクス研究所(pLED) 特任講師
https://www.pled.tokushima-u.ac.jp/
■略歴
2006年長岡技術科学大学博士後期課程修了。博士(工学)。
物質・材料研究機構NIMSポスドク研究員、産業技術総合研究所特別研究員、同志社大学理工学部准教授等を経て、2019年4月より現職。
専門分野は、応用光学。偏光や分光等の光学物理と、液晶や高分子などの有機材料の相互作用を利用した、光計測・センシング技術・デバイス開発などの研究に従事。
【著者紹介】
福田 隆史(ふくだ たかし)
国立研究開発法人産業技術総合研究所 センシングシステム研究センター
バイオ物質センシング研究チーム
■略歴
1996年 東京工業大学 理工学研究科 博士修了、博士(工学)。 日本学術振興会特別研究員、物質工学工業技術研究所 研究員、産業技術総合研究所 主任研究員、新エネルギー産業技術総合開発機構 主任研究員(転籍出向)等を経て、2021年4月より現職。過去に、応用物理学会 代議員、有機分子バイオエレクトロニクス分科会 常任幹事、日本光学会 理事などを歴任。
専門分野は、バイオセンシング・応用光学・光計測・光機能性材料/デバイス。近年では、工業分野以外にも、農業・医学・環境などの各分野における学際研究や企業連携を推進しており、社会で実際に活用される技術の開発に専念している。
画像認識・計測の自動車応用 (1)

理事 技術委員
前田 賢一
1.はじめに
自動車の自動運転が話題に上る中、イメージセンサを利用した画像認識や画像計測が、そのための重要技術として注目されている。イメージセンサというと、CCDやCMOS、あるいはそれらを使ったカメラを思い浮かべるのが通常であるが、イメージセンサは外界の光情報(色・明るさ、など)を電気信号に変換する部分である。それは文字通り外界を「写す」機能を有する部分といえる。それだけでは、画像認識や画像計測を実現したことにはならない。人間はセンサとしての目の他に脳を持っており、これが外界の認識や理解に中心的な役割を果たしている [D.マッケイ,V.マッケイ編, 1993]。ここでは、その脳に相当する部分の実現方法のいくつかを紹介することにする。
2.自動車と画像センシング
自動運転をモチーフに自動車でのセンサ応用を問題にする際、画像が適しているかどうかを考えることは重要である。画像以外に、電波、超音波、レーザー、などのさまざまなセンサを利用することが可能である。距離の計測に目的を限定したとすると、それぞれのセンサで精度もコストも異なる。簡単な長所短所の比較を表1に示す。
| 画像 | 電波、レーザー、など | |
|---|---|---|
| 長所 | 人間が見ているものと同じ | 暗いところでも使える |
| 受動的センシング | (電波は霧の中でも使える) | |
| 短所 | 暗いところでは使えない | 人間とみているものが違う |
| (霧などの条件では使えない) | 光や電波を発する |
画像センシングはどこが良いのかを考えてみることにする。最大のメリットは、画像センシングで得られる情報が人間の得ている情報に近いという点である。人間はいわゆる五感をセンサとして持っているが、得られる情報の大半は視覚情報であると言われている。人間はそのように進化しており、また世界の人工物も人間に便利なように作られている。
実例として図1に示すような道路を想定してみる。前方に電柱やガードレールや車が見えるため、このまま直進するとどれかにぶつかる可能性がある状況である。仮にレーダーで障害物を検知したとすると、前方に電波を反射するものが検知されることだろう。そこで警告を出すかということが問題となる。画像であれば前方の車線がカーブしているので、道なりに進めば障害物は問題とならないことがわかる。これが画像センシングのメリットである。

図2に監視領域を示す。それぞれの監視領域の目的は、概ね以下の通りである。
• 前方:障害物、飛び出し、などの検知
• 後方:バック時、車線変更時の障害物の検知
• 側方:車線変更時や狭い場所での障害物の検知
• 車内:運転手の状況の把握(今回は省略)
3.対象物の識別
対象物の識別は、画像センシングが最も得意とするところである。最近では深層学習(Deep Learning)と呼ばれる技術が主流となっている。ここでは深層学習の概略と応用の例を紹介する。
深層学習は、機械学習の一種で、その中でもニューラルネットワーク(Neural Network)というモデルを使うものである。さらに詳しく述べると、ニューラルネットワークの中でも階層型ニューラルネットワーク(図3参照)という構造に関するものである。
細かな部分を省略すると、深層学習は、大きく次の二つの要素からなる。
• 誤差逆伝播による学習
o 希望する出力が出るように結合の重みを調整
• 多層ネットワーク
o 最少4層以上で、多い場合は100層以上からなる「深い」ネットワーク
(1) 誤差逆伝播による学習
簡単化のため、3層のニューラルネットワークを考えることとする。また、出力も1個であるとする(図4参照)。
細かな計算は省略するが、学習は出力zと正解tとの誤差Eを少なくするように結合重みvとWとを順次修正する。この方法を最初に提案したのは甘利であり、確率的勾配降下法(Stochastic Gradient Descendent)と呼ばれていた [Amari, 1967]。
(2) 多層ネットワーク
ニューラルネットワークにはいろいろな構造が考えられているが、ここで使われているのは、信号が一方向に流れる階層型ニューラルネットワークである。流れる方向に沿ってニューロン素子が層状に並んでいるのが特徴である。この構造を最初に導入したのはRosenbrattであり、それを「単純」パーセプトロン(Perceptron)と呼んだ [Rosenbratt, 1958]。
深層学習で使われる階層は、最低でも4層である。よく使われるのは、たたみ込みニューラルネットワーク(Convolutional Neural Network: CNN)と呼ばれる構造で、図5に示すように、特徴抽出をするConvolution層(C層)とまとめるSubsampling層(S層あるいはPooling層)とが順に並ぶ構成になっている。
この構造は、福島によって提案されたものであり、ネオコグニトロン(Neocognitron)と名付けられた [Fukushima, 1980]
こういう仕組みを実際に利用した例を紹介する。以下はケンブリッジ大学で開発されたSegNetである [Badrinarayanan, etal, 2017]。深層学習と呼ぶのに相応しく、数多くの層が左右対称形に配置されている(図6参照)。左側がエンコーダで、Convolution、Batch Normalisation、ReLU、Poolingと多くの層が並んでいる。右側はデコーダで、検出された特徴をUpsamplingすることで元の画像の各点をラベル付けしている。この構造は、一般的にはU-Netと呼ばれる、セマンティックセグメンテーション(画像から同じ領域を切り出す仕組み)を実現するための方法である。
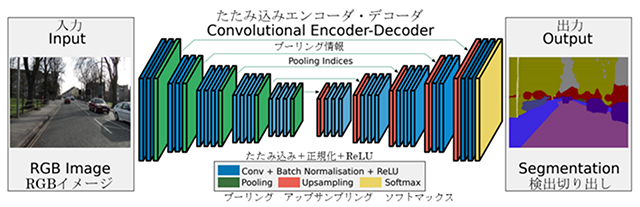
(R. Cipolla教授の許可を得てhttp://mi.eng.cam.ac.uk/projects/segnet/から修正)
図7に実際の入力画像と切り出された結果を示す。

(R. Cipolla教授の許可を得てhttp://mi.eng.cam.ac.uk/projects/segnet/から修正)
ここで紹介したのは一例にすぎないが、深層学習は一般的に物体認識で最も高い精度を達成している方式である。
4.動きの計測
自動車に必要な外界の情報として、対象物体の認識や切り出し以外に、外界物体の動きの情報がある。場合によっては対象物の認識以上に動きの情報は重要である。
自動車自身も動いており、外界にも動いているものがある。ここでの問題点は、自動車自身の動きによって止まっている外界の物体までもが動いて見えることにある。必要なことは、自動車自身の動きによって見かけ上動いて見えるものと、物体自体が動いているものとを区別するということである。
ここで使われる有力な方法として、オプティカルフロー(Optical Flow)がある [二宮芳樹,太田充彦, 1997]。オプティカルフローとは、画面の各点の動きベクトルである。簡単に言えば、画面の各点が比較的短い時間にどのように動くかという情報ということになる。計算方法は何通りかあり、ブロックマッチングによる追跡法、勾配法、Lucas-Kanade法、などが知られている [藤吉弘亘,他, 2013]
ここで車の前方をカメラで撮影しているシーンを想定してみる。そこに、右側から別の車が横切っているとする。その様子を模式的に図8に示す。
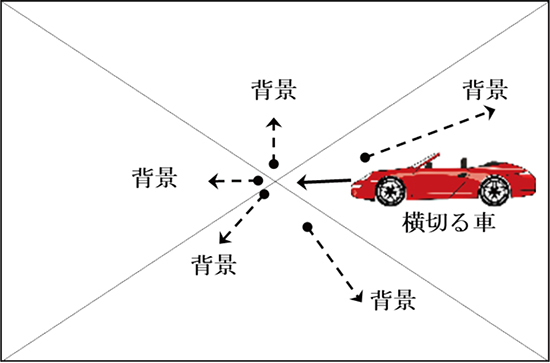
この場合、背景の動きベクトル(オプティカルフロー)は、画面の中心から湧き出してくる方向である(図中の破線で表示)。それに対して横切る車のオプティカルフローは、画面の右から左に向かう方向となる(図中の実線で表示)。
別の例として、高速道路を走行中に自車の広報をカメラで撮影しているシーンを想定してみる。複数車線あるので、追い越すことも追い越されることもある。隣の車線に追い越してくる車がいるとする。その様子を図9に模式的に描く。
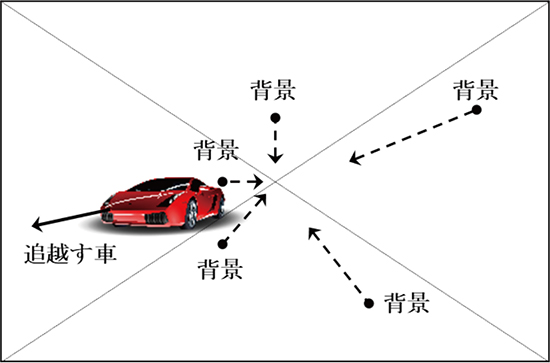
この場合、背景のオプティカルフローは、画面の中央に吸い込まれる方向である(図中の破線で表示)。それに対して、追い越してくる車のオプティカルフローは、逆に中央から湧き出す方向となる(図中の実線で表示)。
ここに示したように、オプティカルフローの状態によって、進行する際や車線変更する際に障害となり得る別の車を検出することが可能となる。ここで重要だったのは物体の種別ではなく、動きの情報であった。
次回に続く-
参考文献
Amari, S., 1967. Theory of adaptive pattern classifires. IEEE Transactions, Issue EC-16, pp. 299-307.
Badrinarayanan, V. etal, 2017. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Scene Segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 39[12], pp. 2481-2495.
D.マッケイ,V.マッケイ編, 1993. ビハインド・アイ. 出版地不明:新曜社.
Fukushima, K., 1980. Noncognition: A Self-organizing Neural Network Model for a Mechanism of Pattern Recognition Unaffected by Shift in Position. Biological Cybernetics, Issue 36, pp. 193-202.
Onoguchi, K. etal, 1998. Planar projection stereopsis method for road extraction. IEICE TRANSACTIONS ON INFORMATION AND SYSTEMS, Issue E18D, pp. 1006-1018.
Rosenbratt, F., 1958. The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychological Review, 65[6], pp. 386-408.
Tomasi, C. Kanade, T., 1992. Shape and Motion from Image Streams under Orthography: a Factorization Method. International Journal of Computer Vision, 9[2], pp. 137-154.
実吉敬二, 2016. ステレオカメラによる自動運転車実現の可能性. エレクトロニクス実装学会誌, 19[6], pp. 398-402.
藤吉弘亘,他, 2013. 電子情報通信学会知識ベース「知識の森」2群-2編-4章 動画解析. [オンライン]
Available at: http://www.ieice-hbkb.org/portal/doc_590.html
[アクセス日: 10 4 2013].
二宮芳樹,太田充彦, 1997. オプティカルフローによる移動物体の検知. 出版地不明, 電子情報通信学会, pp. 25-31.
【著者紹介】
前田 賢一(まえだ けんいち)
一般社団法人 次世代センサ協議会 理事、技術委員
■略歴
1976年 東京工業大学大学院修士課程修了
1976年 東京芝浦電機株式会社(株式会社 東芝)入社
総合研究所(研究開発センター)所属
1989年~1991年 英国エジンバラ大学 客員研究員
1999年~2000年 東芝 関西研究センター長
2000年~2002年 電子情報通信学会 和文論文誌D 編集委員長
2002年~2004年 電子情報通信学会 情報・システムソサイエティ副会長(技術担当)
2004年~2011年 東芝 研究開発センター 技監
2004年~現在IEEE Senior Member
2005年~2008年 Treasurer, Japan Chapter of Computational Intelligence Society, IEEE
2007年 東京工業大学大学院博士課程修了(博士(工学))
2009年~現在 電子情報通信学会フェロー
2012年 Award Chair, ICPR 2012
2012年 Guest Editor, Special Issue, Pattern Recognition Letters
2016年 株式会社 東芝退職
フリーランスのコンサルタント(現職)
2017年~2020年 中央大学 客員研究員
2017年~現在一般社団法人 次世代センサ協議会 技術委員
2019年~現在一般社団法人 次世代センサ協議会 理事
人工知能技術を用いた医用画像処理 (1)

片山 豊
1.はじめに
近年,人工知能 (artificial intelligence: AI) 技術は様々な場面で用いられ,われわれの生活の中で実用化されようとしている.そのような時代背景の中,AI を一般化する中で生じる種々の問題に対して,ガイドラインなどが発表されている.例えば,米国では AI 政策の整備に向けた動きを近年急速に進めている.また,欧州連合では法律と倫理を具体化させようとしている.具体的には,2020 年 2 月に欧州委員会が “AI 白書 1 ” と “AI・IoT・ロボット工学に関する安全・賠償責任レポート 2 ” を発表し,人間中心の AI ルールに向け,6 つの要件や認証制度,賠償責任について提案した.更に,2021 年 6 月には世界保健機関 (World Health Organization: WHO) が今後の WHO の活動指針となる “WHO issues first global report on Artificial Intelligence (AI) in health and six guiding principles for its design and use 3 ” を発表した.その中で WHO は,AI が人の自由や人権を侵害するものであってはならないことや,世界中のすべての人々が AI の恩恵を受けられるようにする必要性を訴えている.
2.医用画像領域の人工知能技術
医療領域での AI 技術に着目すると,近年 AI 技術が搭載されている医用機器が多く販売されている.これは,平成 30 年 12 月 19 日に出された “厚生労働省医政局医事課長通知文書 4 「人工知能 (AI) を用いた診断,治療等の支援を行うプログラムの利用と医師法第 17 条の規定との関係について」” が切っ掛けだと考える.
この通知文書には,”AI を用いた診断・治療支援を行うプログラムを利用して診療を行う場合についても,診断,治療等を行う主体は医師であり,医師はその最終的な判断の責任を負うこととなり,当該診療は医師法 第 17 条の医業として行われるものであるので,十分ご留意をいただきたい.” と記載されており AI を用いた技術を使った場合の責任の所在を医師と定義した.このように責任の所在が定義されたことより,企業による開発が活発になり,商品化が進んだ結果だと考える.
3.放射線画像
医用画像は,画像情報・検査情報およびそれらを通信・印刷・保存・検索するため digital imaging and communications in medicine (DICOM) 規格 5 によりの国際標準規格として定められている.DICOM 規格中でも放射線検査により得られる画像 (放射線画像) は,DICOM 規格では画像を生成した医用機器により computed radiography: CR, computed tomography: CT, magnetic resonance: MR, nuclear medicine: NM,positron emission tomography: PT, x-ray angiographic: XA など,大まかな検査種別の分類を行っている.
一般論になるが,所謂,通常の写真などの画像 (自然画像) に比べて放射線画像は,撮影装置の幾何学的制約や被ばく線量低減のため,低解像度かつ統計ノイズが多い画像となっている 6.放射線画像の画質を向上させるためには,自然画像と同じ様に検出器に入射される光子の数を増加させることで統計ノイズの影響を低減することができるが,入射される光子数の増加は被ばく線量が増加するため,診断可能な画質の画像を得るために必要な撮影線量を診断参考レベル (日本の診断参考レベル: Japan DRLs 7 ) として公表している.
近年,半導体技術の進歩により高性能な画像センサが登場している.こう言った画像センサを用い,画質は同等だがより被ばく線量を低減できる様に工夫されている.そのため,同一の医療機器による分類であっても,施設により画質が大きく異なる特性が放射線画像ある.少し古いデータになるが,放射線医療機器の更新サイクルは年を追うごとに遅くなる傾向があり,施設間格差を生む一因である 8-10.
4.人工知能技術を導入する場合の問題点
AI の基本的な問題点としてドメインシフトが挙げられる.これはモデルを構築したデータと実際に扱うデータが異なることで性能が発揮できない現象で,AI 技術は厳密解ではなく統計的に最適解を導く性質が原因である.AI モデルを実装する際に問題となる自施設で扱うデータを使用して,実用に適したAIモデルを構築できれば解決の可能性があるが,医薬品医療機器法上,施設毎にカスタマイズされたモデルを使用できない.“3.放射線画像” で触れたように,医用画像は施設間格差が大きく,他施設で作成した AI モデルを臨床適用させにくい理由の一つである.
AI 技術のなかでも頻用されている深層学習の特徴として,End-to-End Training が挙げられる.End-to-End Training とは,今までは入力データが与えられてから結果を出力するまで多段の処理を必要としていた機械学習を,様々な処理を行う複数の層・モジュールを備えた一つの大きな Neural Network に置き換えて学習を行うことであり,医療画像の中でも放射線画像診断領域の AI で End-to-End Training を考えると各装置から出力された画像と確定診断となる.確定診断を可能とする AI モデルを考えた時,ドメインシフトは非常に大きな問題となる.放射線画像診断領域で用いられている AI 技術の中には画像処理なども含まれるが,画像処理の目的は診断を行いやすい画像の生成であり,診断医による診断の補助や AI を用いた確定診断の前処理に用いられている.
以上より,AI モデルの臨床への商用利用や将来的に確定診断を可能とする AI モデルの実現を考えた時,ドメインシフトを改善する必要がある.ドメインシフトを改善するには “学習データを増加させる” や “課題に応じたネットワークに変更する” ことで実現可能であるが,バリエーションの範囲が不明確であり,すべての施設で普遍的に扱える AI モデルの作成は困難である.実際に AI を応用できるのは,一貫した基準で継続的に大量の学習用データを集めることができる施設でのみ実現できる.ドメインシフトを低減する研究 11 や少数の教師データから AI モデルを作成する手法 12 も考案されているが,医療画像領域での検証報告は少なく,医療画像領域の AI 技術を実現させるためには大量の教師データが必要である.
次回に続く-
引用文献
- https://ec.europa.eu/info/publications/white-paper-artificial-intelligence-european-approach-excellence-and-trust_en
- https://eur-lex.europa.eu/legal-content/en/TXT/?qid=1593079180383&uri=CELEX%3A52020DC0064
- https://www.who.int/news/item/28-06-2021-who-issues-first-global-report-on-ai-in-health-and-six
-guiding-principles-for-its-design-and-use - https://www.pmda.go.jp/files/000227450.pdf
- MILDENBERGER, Peter; EICHELBERG, Marco; MARTIN, Eric. Introduction to the DICOM standard. European radiology, 2002, 12.4: 920-927.
- https://thegradient.pub/why-skin-lesions-are-peanuts-and-brain-tumors-harder-nuts/
- http://www.radher.jp/J-RIME/report/JapanDRL2020_jp.pdf
- 井上清. 「平成 20 年度画像医療システム等の導入状況と安全確保状況に関する調査」 について-その 1. 日本放射線技術学会雑誌, 2009, 65.12: 1702-1705.
- 井上清. 「平成 20 年度画像医療システム等の導入状況と安全確保状況に関する調査」 について-その 2. 日本放射線技術学会雑誌, 2010, 66.1: 120-123.
- 中島渉. 「平成 25 年度画像医療システム等の導入状況と 安全確保状況に関する調査」 について. 日本放射線技術学会雑誌, 2014, 70.6: 602-606.
- XU, Qinwei, et al. A Fourier-based Framework for Domain Generalization. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2021. p. 14383-14392.
- DEITSCH, Sergiu, et al. Automatic classification of defective photovoltaic module cells in electroluminescence images. Solar Energy, 2019, 185: 455-468.
【著者紹介】
片山 豊(かたやま ゆたか)
大阪市立大学医学部附属病院 中央放射線部
■著者略歴
2003 年 大阪大学医学部附属病院,
2004 年 りんくう総合医療センター,
2006 年 北摂総合病院,
2007 年 大阪市立大学医学部附属病院に勤務.放射線技術学会,核医学技術学会に所属.スパースコーディングを用いた医用画像処理の研究開発を 2014年頃より始め,その後,深層学習を用いた医用画像処理の研究開発に 2017 年頃より従事.
偏光カメラ技術と計測 (1)
井上 喜彦
1.はじめに
これまで画像計測は、輝度や色の面分布情報を利用することが一般的であったが、近年はこれらに加えて光の波の振動方向の情報、即ち偏光情報を画像情報として取得し、これを利用する偏光画像計測の応用への機運が高まってきている。
その要因として、偏光をイメージング情報として取得可能な偏光カメラが開発され、その入手性が向上してきたことが挙げられる。その一方で、得られた情報の光学的な意味や活用方法についての知見の不足から、偏光カメラを有効に活用できない場合も多い。
本稿では、偏光カメラとその種類、応用分野を紹介するとともに、偏光の理解に有効なツールを紹介することで、偏光情報の有効活用と市場拡大に繋がることを期待する。
2.偏光カメラとその応用分野
本稿では、偏光カメラを『面分布の偏光情報を(比較的短時間に)取得できるカメラ』と定義する。通常のカメラは、光に含まれる基本情報としての輝度分布、色分布を取得しているが、そのままでは偏光情報を取得することはできない。そこで、次章に紹介する様々な工夫により、2000年代に入って、偏光情報を取得できるカメラが実用化されてきた。
偏光カメラが市場に登場した当初は、偏光イメージングの可能性に多くの期待が寄せられたが、現在でもその応用分野は極めて限定的である。その主な理由は、二つ挙げられる。
一つ目の理由は、「偏光情報の理解のしにくさ」である。先に記した通常のカメラで扱う輝度分布や色分布は直感的に理解することが容易であり、その応用範囲も広い。しかし、偏光は実体験として触れる機会が少ない。例えば、偏光の最大の応用市場とも言える液晶ディスプレイも、最終的には輝度と色の情報を映し出すのが機能であり、その原理を理解せずに恩恵にあずかる場合がほとんどである。理解が広まりにくい技術の市場拡大に時間がかかることは当然とも言える。
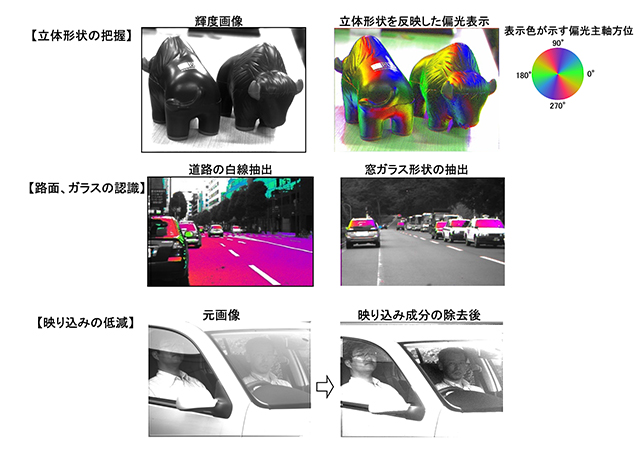
もう一つの理由は。「偏光カメラで得られる情報のロバスト性確保の難しさ」である。偏光情報には、撮影対象である物体の面の向き、材質だけではなく、物質の表面粗さ、光源の位置や偏光状態などの影響を強く受ける。この為、偏光カメラの応用として挙げられてきた、立体形状の認識や、ガラス表面の映り込みの低減や、偏光に特徴的な特性を持つ物体の特定など(図1)は、限定的な条件下では有効に機能するものの、異なる環境下で同じ性能を発揮することは困難である。特に屋外環境の様に、朝、昼、夜の太陽の位置や有無の違いあり、更に雨や雪が降る場合も想定される環境下、偏光カメラの有効活用への困難さは高まる。
このため、偏光カメラの主な用途は、光源の位置や偏光状態を固定でき、測定対象も限定できる、屋内の計測用途である。例えば、透明な測定対象の分子配向や応力などにより発生する光学異方性(複屈折)は、透過光の偏光状態を変化させる。従って、測定対象を透過する前後の偏光情報を偏光カメラで取得し、これらを比較演算することで複屈折の定量評価装置が実現し、その適用範囲は広がってきている。また、レーザー光の偏光分布などをリアルタイムに計測する用途にも有用性が高い。
3.偏光カメラの種類
3.1 偏光カメラの基本構造での分類
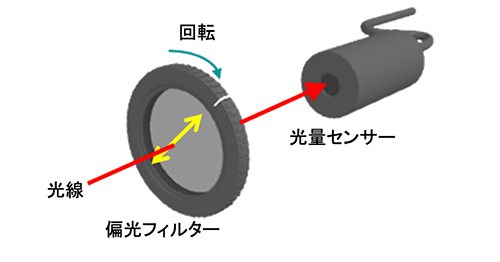
偏光情報の定量計測の基本は、回転する偏光フィルターを含む光学系の透過光量を、光量センサで計測し(図2)、これを演算することである。従来は、一般的には光量センサには点計測用のセンサが用いられた。その主な理由は、点計測センサの代わりにイメージセンサを用いた場合、回転する偏光フィルターにより生じる光軸のブレが、イメージセンサの画素レベル以下に抑えることが難しく、透過光量の変化が、計測する偏光情報に基づいて変化したのか、画像の明暗分布により変化したのか区別がつかなくなってしまう問題があった為である。
そこで近年では、偏光フィルターを実際に回転させることなく、しかし光学的には偏光フィルターを回転させたことと等価な情報を得る様々な工夫により、面分布の偏光情報を計測できる装置が開発された。その手法は、大きく3つの種類がある(図3)。
一つ目の手法は、可変な光学特性を持つデバイスを用いて、偏光フィルターを回した場合と同様な情報を得る手法である(図3(a))。このデバイスには、液晶やPEM(光弾性変調器)が用いられる。こうした、可変デバイスを組み込んだシステムは、計測装置として実用化されている。欠点としては、高い精度や安定性を維持する為に可変デバイスのキャリブレーションの手間が欠かせないこと、手軽に屋外に持ち出して計測するような用途には不向きなこととに加えて、複数フレームのデータを比較する必要がある為、超高速な測定は原理上不可能な点が挙げられる。
二つ目の手法は、画像全体をプリズムなどで分離し、それぞれを複数枚のイメージセンサで取得する方法である(図3(b))。この手法には、プリズム自体に偏光分離機能を持たせたタイプと、出来るだけ偏光依存性の小さなプリズムを用いてイメージセンサの直前に偏光フィルターを配置するタイプがある。しかし、偏光情報を定量計測する為には、少なくても3つ以上の偏光情報に分離する必要があり、これを実現するプリズムの構成が複雑になりやすく、且つこれらのセンサを画素レベルで正確に位置決めする必要があることなどにより、コストや性能の安定面などの課題がある。このため、現時点では、プリズムで2方向のみに分離した偏光画像を比較した情報を出力する簡易的な製品だけが市場に見られる。
三つ目の手法は、偏光フィルターを回す代わりに、向きの異なる微細な偏光フィルターが多数集積された集積偏光フィルターを用いる手法である(図3(c))。集積偏光フィルターはイメージセンサと一体化され、その一領域のサイズは、イメージセンサの画素サイズに合わせて決められる。この手法の利点は、駆動部や精密な制御装置なしに、通常のデジタルカメラと程同等の手軽さで偏光計測が可能になる点である。更に、1フレームの画像情報から偏光情報を演算できることから、高速度センサとの組み合わせにより、超高速な偏光計測が可能になる点も大きな利点である。一方で、一つの偏光情報の演算に複数画素の情報を用いる原理上、これらの画素には同一の偏光情報が入射していることを仮定する必要がある。従って、解像度に近い細かな偏光の空間変化がある情報を撮影した場合、モアレと呼ばれる疑似情報が発生する、という欠点がある。とはいえ、総合的には利点の方が勝る場合が多く、現在市場にある偏光カメラの多くはこのタイプである。
3.2 集積偏光フィルター内蔵タイプの分類
上記の3つ目の方式である集積偏光フィルターを内蔵した偏光センサは、偏光フィルターの機能によって2種類に大別される。一方は偏光フィルターの機能が偏光子のタイプであり、他方は波長板のタイプである。それぞれが、偏光子と波長板を回転させたときに得られる情報を取得することから、実際に回転動作は行われていないが、便宜上前者を「偏光子回転型」、後者を「波長板回転型」とよぶ。
偏光子は、一方向の振動成分を吸収する機能を有し、一般的な偏光フィルムと基本的に同じと考えてよい。但し、偏光フィルムで集積フィルターを作ることは困難であり、ワイヤーグリッド偏光子やフォトニック結晶偏光子を内蔵した偏光センサが製品化されている。
もう一方の波長板は、透過光の偏光状態を変化させる機能を持ち、その集積フィルターとイメージセンサの間には一様な偏光フィルターが挿入され、集積波長板/一様偏光子/イメージセンサの3層構造になる。波長板回転型の偏光センサは、フォトニック結晶波長板を内蔵したものが製品化されている。
これら2種類の偏光センサの機能は異なる。「偏光子回転型」の偏光計測機能は限定的であり、偏光情報の半分を残りの半分と区別がつかないことや、偏光変化に感度が0になる偏光状態があるほか、無偏光成分が混入する環境では、正しい偏光計測は不可能になるなどの欠点を原理的に有する。一方の「波長板回転型」は、あらゆる偏光情報を検出可能で、無偏光成分の混入量も把握できるという強みがあり、あらゆる偏光情報の検出が必要な計測装置には、「波長板回転型」の偏光センサを選ぶ必要がある。これらのセンサの違いは、次章でも紹介する。
次回に続く-
【著者紹介】
井上 喜彦(いのうえ よしひこ)
株式会社フォトニックラティス 取締役
■略歴
1993年3月京都大学工学部金属系学科卒。
1993年4月ソニー株式会社入社。磁性薄膜のプロセス開発、材料開発に従事。
2008年4月株式会社フォトニックラティス入社。フォトニック結晶の作製プロセス開発、応用製品開発及びにそれらの営業・販売に従事。
2010年4月同社取締役就任。マーケティング、営業担当。フォトニック結晶応用製品の一つである複屈折計測装置の市場拡大と機能向上とを実現してきた。近年ではアジア圏を中心とした海外マーケティングにも重点を置いた活動に従事。
効率よく高画質なHDR画像を取得可能 監視カメラ向けCMOSセンサ“Ll7060SAC”
キヤノン(株)は、2回の露光〔※1〕で120dB(デシベル)のハイダイナミックレンジを実現できる〔※2〕有効画素数約281万画素(1936×1456)の 1/2.3型CMOSセンサーの新製品“LI7060SAC”を2021年12月下旬に発売する。
近年、監視カメラ、インフラ検査用カメラやウェアラブルカメラなどにおいて、明暗差の大きい環境下での撮影に、高画質な画像を撮像できるイメージセンサーのニーズが高まっている。
新製品は、2回の露光で効率的に120dB、単露光でも75dBのハイダイナミックレンジを実現する。さらに、アスペクト比16:9のフルHDよりも垂直方向を広げた約281万画素のアスペクト比4:3の撮影ができる。これらにより、監視カメラなどのシステム全体の負荷を軽減しつつ、広いダイナミックレンジを実現する高画質な画像を広範囲で取得できる。ハイダイナミックレンジを実現する高感度CMOSセンサー「LI7050」(2020年10月発売)と合わせ、幅広いニーズに対応する。
【おもな特長】
・120dBのハイダイナミックレンジを高画質に効率よく取得可能
1画素あたりに電子の数を多く溜め込むことができる飽和値を高くするとともにノイズを低減することで、2回の露光で120dBのハイダイナミックレンジを実現する画像を取得できる「HDR駆動機能」を搭載している。単露光でも75dBを実現し、少ない露光回数で効率よくハイダイナミックレンジの画像を取得できる。これにより、システム全体の電力消費を抑えながら、明暗差の大きい環境で被写体の画像を高画質で取得できる。
・さまざまな用途での撮影を可能とする性能
ロボットビジョンやインフラ検査用カメラに組み込む際に求められる4:3のアスペクト比による広範囲での撮影や、モバイル機器やカメラのインターフェースとして普及している「MIPI CSI-2」に対応している。さらに、-20℃から85℃までの広い温度範囲で動作するため、ウェアラブルカメラなどで必要とされる過酷な温度環境で使用することが可能。
また、高温環境では暗電流ノイズ〔※3〕の増加により黒レベル〔※4〕が上昇し、映像の中の暗い部分が白くなることが懸念されるが、リアルタイムに黒レベルを補正する機能を搭載することで、高画質を実現する。
※1. センサーに光があたることで、画像を取得すること。
※2. センサー内でHDR合成はできない。
※3. 光が当たらなくても熱によって生じるノイズ。
※4. 映像の中の最も暗い部分の輝度レベル。
-CMOSセンサーの市場動向
監視カメラをはじめ、ロボットビジョンやインフラ検査用カメラ、ウェアラブルカメラなどの需要が高まり、明暗差の大きい状況においても高画質な画像を広範囲で撮像できるイメージセンサーのニーズが高まっている。さらに、監視カメラシステムなどは、小型化、簡素化、軽量化に対応しつつ、電力消費を抑えられるイメージセンサーが求められている。(キヤノン調べ)
ニュースリリースサイト:https://canon.jp/corporate/newsrelease/2021/2021-11/pr-li7060sac
液体ヘリウム不要の新世代磁気センサ、光ポンピング磁力計モジュール「QZFM Gen-3」

(株)ナノシードは新たに、米国のQuSpin社製製品である、光ポンピング磁力計モジュール QZFM Gen-3 の取扱いを開始した。
QZFMは、低磁場環境下において非常にセンシティブな光ポンピング磁力計モジュール。
センサヘッドは、常温で作動し液体ヘリウムを必要としない。またレーザー、
ファイバーなどの部品は温度管理のための特殊設計をしており、コンパクトで使いやすい
デザインとなっている。
QZFMは、校正を自動に行う。また小型のモジュールは、マウス一つで簡単に操作できるようにすべての機能を網羅するように設計されている。
Gen-3では、2軸タイプ、3軸タイプから選択できる。またセンサヘッドとケーブルが分離できるようになり、取り扱いが便利になったとのこと。
〔製品の特長〕
・超高感度 ・常温作動 ・コンパクト ・簡単操作
製品サイト(NANOXEED):https://nanoxeed.co.jp/product/qzfm_gen2/
リアルハプティクスを産業用ネットワーク CC-Link IE TSN で利用可能に
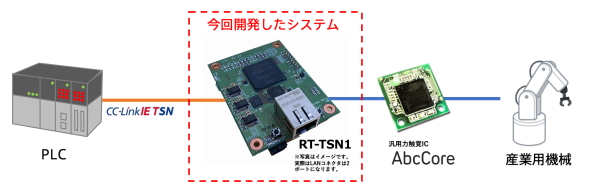
モーションリブ(株)は、力触覚コントローラIC「AbcCore」を産業用ネットワーク CC-Link IE TSN に接続し、PLC 等の産業用機器を用いてアクチュエータの力加減を制御し、力触覚情報を送受信する技術を開発した。
産業分野における AbcCore の活用を促進するため、今後同技術を搭載した CC-Link IE TSN 通信変換モジュールを順次提供していくという。
これまで、リアルハプティクス(※)搭載力触覚コントローラICチップ「AbcCore」を、PLC等の産業用機器から利用するためには、AbcCore – PLC 間の通信においてマイコン等による通信変換処理の開発を行う必要があった。
今回開発したシステム(RT-TSN1) により、オープンな産業用ネットワークである CC-Link IE TSN を使って PLC と AbcCore が通信可能となり、マイコン等による通信変換処理を別途開発することなく、高速で繊細なアクチュエータの力加減の制御(位置・速度・力の統合制御)を容易に実現できるようになる。
また、C言語などによるプログラム記述を行わずに、産業用機器で一般的に使われているラダー言語を用いて AbcCore を扱えるようになるため、ユーザーは産業用機器向けのロジック開発に専念できるようになる。
本システムにより、「PLC+産業用機械」の組み合わせで動作する一般的な産業用システムにおいて、従来に比べて AbcCore を組み込みやすくなり、「PLC+AbcCore+産業用機械」のようにシステムを構築することで、産業用機械が人のような力加減や感触を簡単に獲得できるようになる。
リアルハプティクスを活用すると上記のような力加減の制御だけでなく、AbcCore の位置・速度・力のセンシング機能により、作業達成状況を認識しながら動作できるようになるため、歩留まり向上への活用も期待される。
なお、本製品の発売に際しては事前に CC-Link 協会による信頼性確保のための CC-Link IE TSN コンフォーマンス試験を受験予定とのこと。
※リアルハプティクス:慶應義塾大学で発明された力触覚伝送技術で、アクチュエータの力加減を自在に制御することができる技術。 この技術により、力センサレスで力触覚をともなう「遠隔操作」「計測可視化・分析」「自動化」「感触の再現・VR」が可能となる。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000017.000027265.html
光伝播のスローモーション動画記録技術の55万倍高速シミュレーションに成功
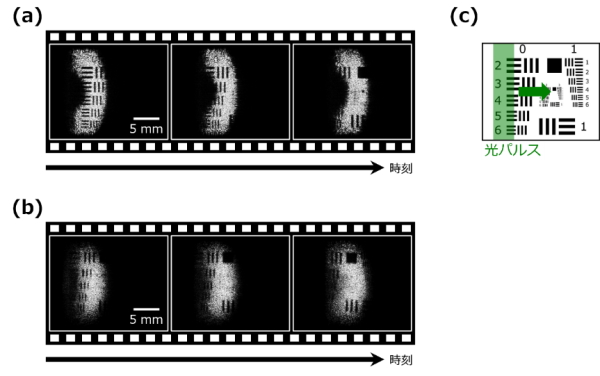
千葉大学大学院工学研究院 角江崇助教、下馬場朋禄教授、伊藤智義教授、京都工芸繊維大学電気電子工学系 粟辻安浩教授、同大学院工芸科学研究科博士後期課程 井上智好氏らの研究グループは、光の伝播をスローモーション動画で記録できる技術を、従来と比較して55万倍高速にコンピューターシミュレーション可能な計算アルゴリズムの開発に成功した。
この成果により、当該技術において大きな課題となっていたスローモーション動画に含まれる時空間歪みを除去し、光の振る舞いを忠実に再現可能にする見通しが立った。光の伝播をスローモーション動画で記録できる技術は、生体細胞などの散乱媒質内を伝播する光の振る舞いの可視化を可能にするため、本成果は、散乱により乱された光の情報を復元し、媒質の内部状態や媒質と光との相互作用を明らかにすることを目指す「散乱透視学」の実現へ向けた第一歩であると期待できるという。
この研究成果は、2021年11月23日に、米国光学会(Optica)が刊行する科学論文雑誌の「Journal of the Optical Society of America A」に掲載された。
ニュースリリースサイト(chiba-u):https://www.chiba-u.ac.jp/others/topics/info/55.html
センシンロボティクスとACSL、共同で屋内自律飛行システムを開発

(株)センシンロボティクスと(株)ACSLは、共同で『SENSYN CORE』とACSLの国産ドローンMiniを活用した屋内自律飛行システムを開発した。
『SENSYN CORE』上で3Dモデル(設計図面、立面図)を用いてマップを作成し、Visual SLAM等で自己位置測位を行う『Mini』を用いて自動飛行を行うことが可能である。
指定ルートに沿ってドローンを自動飛行させ、取得データのアップロード、管理、見える化まで一連の流れを自動化することで、工場・プラント内、建設現場などの無人建屋設備の点検・巡視業務など、従来人が行っていた作業の大幅な効率化を実現するという。
ドローンは通常GPS等の衛星測位システムを使って現在位置を測位し、その他のセンサと連携して自律飛行を実現している。しかし屋内や地下室、トンネル内部、橋梁の下、タンク内部などでは衛星電波の受信が難しく、測位できないかもしくは測位誤差が大きくなる恐れがある。また、非GPS環境において自己位置測位が可能な機体を用いた場合でも、機体自己位置とマップ上の機体位置を合わせ、直感的なルート設定ができなかったことが課題だった。
今回開発した屋内自律飛行システムでは、3Dモデルを配置した地図上で、ルート設定や機体の自己位置表示が可能となり、ユーザビリティが格段に向上した。これまで実験的な側面が強かった屋内(非GPS環境)飛行を実用レベルに押し上げるもので、工場内の大型装置点検、物流倉庫棚卸し、大型商業施設警備、建設中物件の進捗管理などへ活用することで、これらの業務のリモート化が期待されるとのこと。
センシンロボティクスとACSLは今後も巡視・安全管理のリモート化や高度化を進め、社会課題でもある人手不足の解消や作業者の安全確保に貢献できるソリューションを開発していくとしている。
ニュースリリースサイト(sensyn-robotics):
https://www.sensyn-robotics.com/news/acsl-indoor
EPSON、ダム及び河川水門設備状態監視用のデジタル3軸振動センサを開発
セイコーエプソン(株)は、国土交通省「ダム用及び河川用水門設備状態監視ガイドライン」河川用ゲート設備点検・整備標準要領の指針ISO10816/ISO20816(*1)電動機の判定基準準拠の振動センサ『M-A342VD10』と防塵防水RS422インターフェイス仕様の『M-A542VR10』を開発した。
両製品とも、エプソン独自の微細加工技術を用いた水晶振動センサ素子により、低ノイズ・高安定・低消費電力の特徴を持つ、デジタル速度・変位出力の3軸振動センサである。本製品は2021年12月より量産を開始する。
地球温暖化により想定外の大雨や洪水が頻発する現代、治水に関わる水門・ダムの的確な稼働は、地域住民の安心・安全な生活に必要不可欠なものになっている。エプソンの振動センサは、国の管理指針に基づき水門・ダムのゲートを開閉するモーターの振動を計測し、装置の状態把握と適切なメンテナンスを実現するという。
■本製品(『M-A342VD10』『M-A542VR10』)の特徴
・ISO10816/ISO20816準拠:速度・変位の出力に対応
・広いダイナミックレンジ:振動の大きさに合わせ、測定レンジの調整が不要
・磁界影響を受けない:水晶式センサのため、強力な磁界が生じるモーターを高精度に測定可能
・ノイズに強い:ノイズの影響を受けにくいデジタル出力
・シンプルな測定環境:チャージアンプ、A/Dコンバーターなどの周辺機器が不要
・高い信頼性:平均故障間隔は87,600時間を保証
■本製品のアプリケーション
堰(せき)、水門、ダムゲート、開閉用モーター、など
【用語説明】
*1:ISO10816/ISO20816
ISO(International Organization for Standardization)により作成された、回転機械および非回転機械で測定される機械振動の測定および評価に関する一般的なガイドラインを定める基本文書。
ニュースリリースサイト(EPSON):https://www.epson.jp/osirase/2021/211124.htm