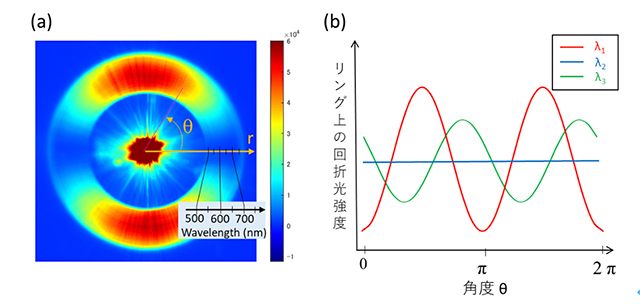
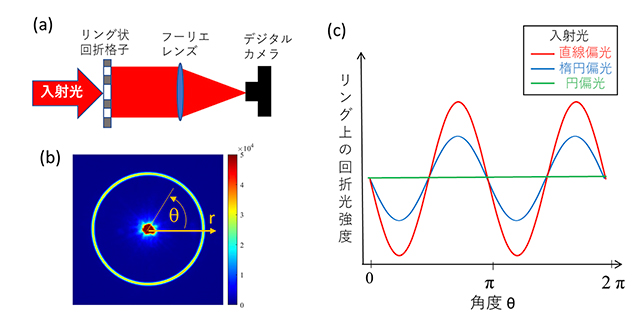
前半の章でも述べたように、偏光情報を検出するには、楕円の軌跡を決定する必要があり、検光子を機械的に回転させて透過光強度を逐次測定するような、時間のかかる動作が必要となる。更に、多波長の光が対象となった場合には、分光測定の要素が付加され、装置構成その他の面でも簡便性は大きく失われていくこととなる。もし、検光子を回転させることなく偏光情報と分光情報を同時に検出することができれば、有効な技術となると期待される。そこで我々は、検光子の回転によって得られる時間展開された一連の情報を、何らかの偏光素子を用いて空間的に同時に展開できれば、回転操作を省くことができ、ワンショットで偏光情報を測定できると考えた。そして、図6(a)に示す様な、一軸配向の液晶分子において配向秩序を周期的に変調した1次元回折格子の回折特性に注目した。このような回折格子は、格子ベクトル k と入射偏光の向きEが一致あるいは直交する場合に、1次光の回折効率が最大となる(図6(b))。従って、このような1次元回折格子を、図6(c)のように放射状に配置すれば、同心円の多重リング型の回折格子となり、光入射によって生じる同じくリング状の回折光において、その円周上の光強度分布から偏光状態が決定できると考えた。加えて、回折角の波長分散に基づいて、分光情報も同時に検出できると予想された。以下にその実験結果を示す。
前節では、単波長による結果を示したが、多波長の光を用いた場合の結果を、図8(a)に示す。入射光として、p偏光(水平偏光)の白色光を用いた。単波長の場合(図7(b))に比べて、太いドーナツ状の回折光が観測されており、その偏光特性に基づいて、水平方向の光強度が弱くなっていることが分かる。波長フィルターを用いて、実験的に解析すると、このドーナツ状リングは特定の半径 r において、各波長の情報を示していることが明らかとなった。即ち、図中に付加された波長軸に沿って、所望の波長の偏光情報を抽出できることを示しており、ワンショットの回折光写真から、波長毎の偏光状態を図7(b)に示したようなイメージで同時に検出できることになる。
H. Suzuki, A. Emoto, N. Furuso, D. Koyama, and M. Ishikawa, “Polarization information landscapes expanded from single-shot images of ring-like diffraction patterns,” OSA Continuum, 4(2021)2796-2804.
図11(b)に示すように、二つの三角形の相似関係から、求めたい距離は、D = b f / sという簡単な式で計算することができる。
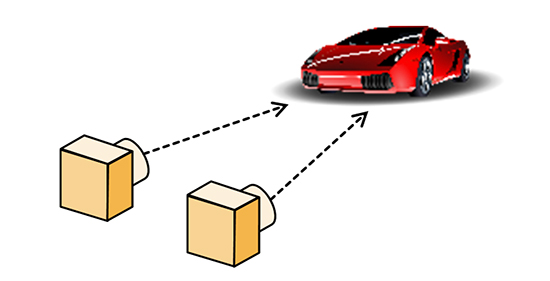
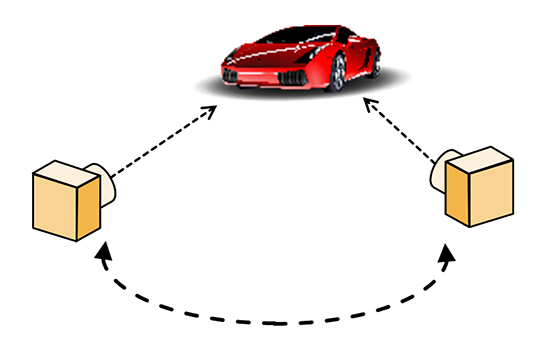
広い意味のステレオ技術には別の方法もある。ステレオカメラは、使うことができれば理想的であるが、コストの問題などから1台のカメラしか使えない場合がある。あるいは、先に説明したステレオカメラでベースラインが正確に測れない場合にも同じ原理が使える。たとえば複数の航空写真から3次元的な地形のモデルを作る場合にも使われる。1台のカメラで距離を求める場合には、制限がある。第一はカメラと対象物との間で相対的な運動(Motion)が必要だということである。この方法はShape from MotionあるいはStructure from Motion(いずれも略記はSfM)と呼ばれている [Tomasi & Kanade, 1992]。適当な短い日本語名称がないので「多視点からの3次元形状復元」というような長い訳が使われることもある。図12にSfMの概念を示す。図中にカメラは2ヶ所しか描かれていないが、通常はもっと多くの撮影を使う。
簡単のために3×3の領域(ブロック)を考え、その中心に特徴点があるとする。このブロックと同じパターンがどこにあるかを探索するのが対応付である。2つの領域の比較計算方法には何種類かあるが、よく使われるのは、SAD(Sum of Absolute Difference)と呼ばれるものである。SAD 以外に、SSD(Sum of Squared Difference)、NCC(Normalized Cross Correlation)という計算方法がある。計算量の観点からは、SADが最も簡単であり、NCCが最もたいへんである。精度の観点からは逆の順序になるので、実際の応用に即して計算方法を決定する必要がある。
Amari, S., 1967. Theory of adaptive pattern classifires. IEEE Transactions, Issue EC-16, pp. 299-307.
Badrinarayanan, V. etal, 2017. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Scene Segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 39[12], pp. 2481-2495.
D.マッケイ,V.マッケイ編, 1993. ビハインド・アイ. 出版地不明:新曜社.
Fukushima, K., 1980. Noncognition: A Self-organizing Neural Network Model for a Mechanism of Pattern Recognition Unaffected by Shift in Position. Biological Cybernetics, Issue 36, pp. 193-202.
Onoguchi, K. etal, 1998. Planar projection stereopsis method for road extraction. IEICE TRANSACTIONS ON INFORMATION AND SYSTEMS, Issue E18D, pp. 1006-1018.
Rosenbratt, F., 1958. The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychological Review, 65[6], pp. 386-408.
Tomasi, C. Kanade, T., 1992. Shape and Motion from Image Streams under Orthography: a Factorization Method. International Journal of Computer Vision, 9[2], pp. 137-154.
実吉敬二, 2016. ステレオカメラによる自動運転車実現の可能性. エレクトロニクス実装学会誌, 19[6], pp. 398-402.
藤吉弘亘,他, 2013. 電子情報通信学会知識ベース「知識の森」2群-2編-4章 動画解析. [オンライン]
Available at: http://www.ieice-hbkb.org/portal/doc_590.html
[アクセス日: 10 4 2013].
二宮芳樹,太田充彦, 1997. オプティカルフローによる移動物体の検知. 出版地不明, 電子情報通信学会, pp. 25-31.
このセクションでは,私が取り組んでいる研究を紹介する.
AI を用いた研究には一貫した基準で継続的にデータを取得し続けることが必要であるが,通常の臨床検査で教師データを収集できないため教師データに医用画像を使用しない AI技術 (5-1) および AI を使用しない解決方法を用いた場合 (5-2) について記す.
5-1.超解像を用いたノイズ低減処理 13
高精細なディスプレイパネルが実用化されているが表示されるコンテンツの解像度は大きく変化しておらず低解像度コンテンツの表示にはアップサンプリング処理が適用される.アップサンプリング処理の中でも入力画像を分析しながら標本化により失われた高周波成分の情報を推定したアップサンプリング処理である超解像が注目されている.しかし,医用画像に特化した AI モデルを作成するのに必要な教師データが取得できない.具体的には,超解像モデルを作成するために必要な高解像度画像は,撮影装置 (放射線医療機器) の幾何学的制約 (主に検出器に起因した制約) により取得できない.また,ノイズ低減モデルを作成するために必要な低ノイズ画像は,患者さまの被ばく線量を低減する観点から取得することは不可能である.別の観点とし,AI を用いたデノイズ処理は未だ不自然さが発生するため,医用画像処理としては不適切だと考える.
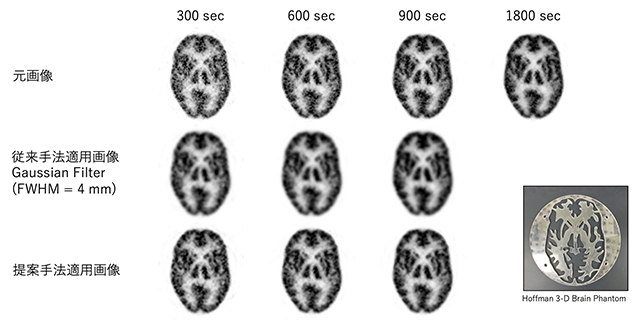
本稿では医用画像に特化した教師データが取得できないことから,自然画像のみから学習した超解像モデルを使用して,放射線画像の中でも,核医学検査の一種である PET 画像に対してボケの少ないノイズ低減処理を提案した (Fig. 1).
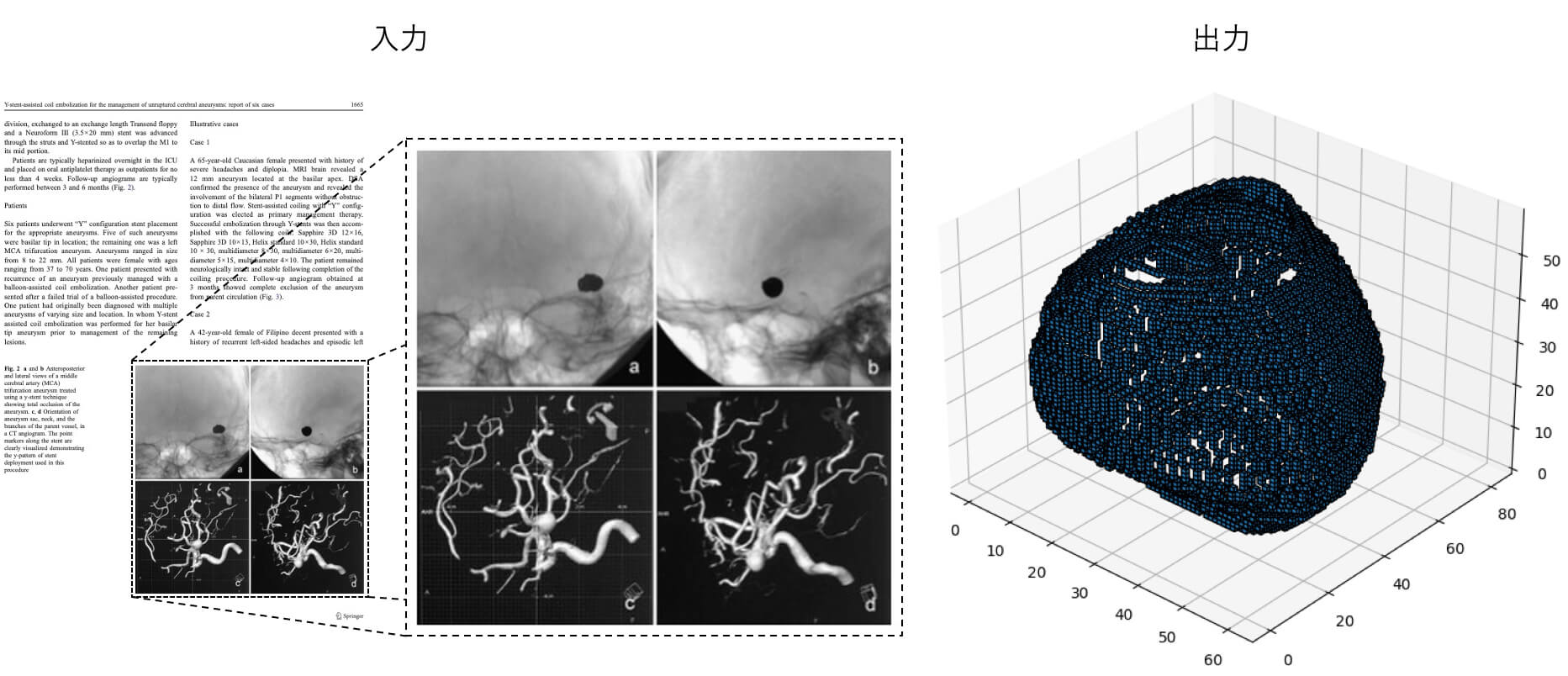
LOZEN, Andrew, et al. Y-stent-assisted coil embolization for the management of unruptured cerebral aneurysms: report of six cases. Acta neurochirurgica, 2009, 151.12: 1663-1672. Fig.2 より引用Fig. 4 三次元形状の復元
観察方向が増えると死角が減り,再構築した三次元モデルの不自然な凹凸が低減するが,臨床検査を対象としているので,2 方向の血管造影像からコイルを抽出する.
6.さいごに
近年,“AI 技術” と言う名称で総括されることが非常に多い.しかし,医用画像処理に対する AI 技術は,物体検出,画像認識および画像分類などの “画像解析技術” から低解像度画像から高解像度画像の生成や統計ノイズの低減などの “画像処理技術”,敵対的生成ネットワーク (generative adversarial networks: GAN) を用いた “画像変換 (image-to-image translation)” まで多岐に渡る (Fig. 5).文献検索をする際のキーワードは “AI” だけでなく具体的な技術名を足したほうが目的の資料を探すことができると思われる.
AI 技術を用いて何れの課題を解決する場合でも,AI は統計的に最適解を導き出すシステムであるため,課題に対応した適切な教師データを用意する必要がある.すなわち,学習データを増やすことが見込めない状況や学習データと検証用データが乖離する場合は,5-2 で示したように AI 技術を用いないほうが良い場合があることに留意頂きたい.

 /2だけズレており、この点だけ一意的な補正が必要となる。)
/2だけズレており、この点だけ一意的な補正が必要となる。)