
情報理工学部 教授
野間 春生
3. MEMS触覚センサ
3.1. 基本原理
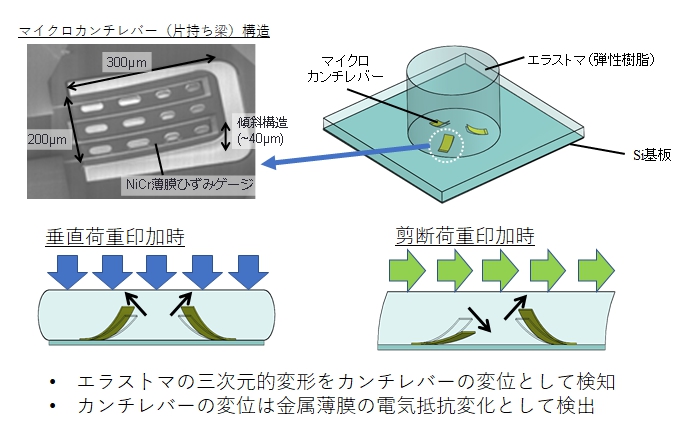
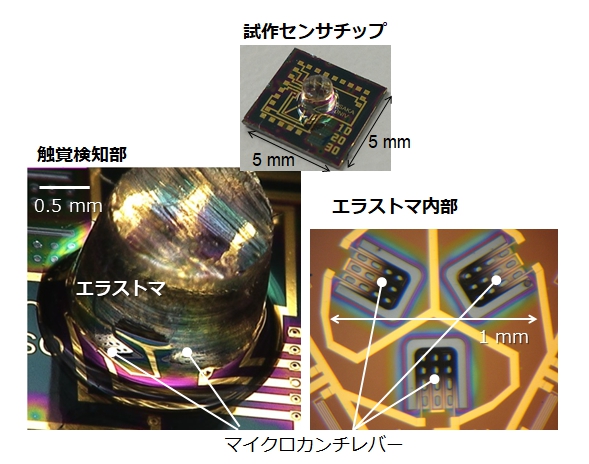
筆者らはこれまでにMEMS(Micro Electro Mechanical Systems)技術を応用し、超小型の触覚センサを開発してきた。図3にその動作原理を、図4に試作したサンプルを示す。
この触覚センサはSi基板の上に極小マイクロカンチレバーを複数個作製し、さらに全体を弾性体(エラストマ)で覆う構造である。この弾性体の上部に外力を与えると、弾性体が変形し、同時にカンチレバーの傾斜角度も変わる。電気的にこの傾斜角を計測し、適切な演算を施すことで、弾性体上部に作用する外力を3軸(圧力+剪断力2軸)として計測できる。現在の試作センサは直径1mm、高さ1mmで実現している。先のヒトの皮膚触覚構造に述べたように、この触覚センサが外部からの機械的刺激を弾性体内部の超小型の検知素子で検出する構造は人間の触覚受容器に類似している。
3.2. 製造プロセス
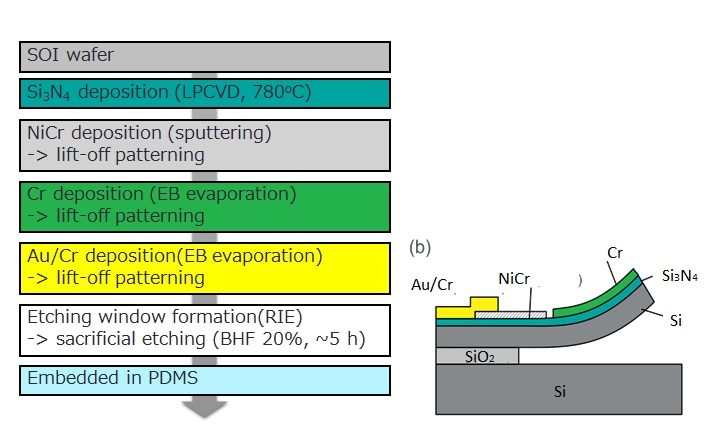
図5にMEMS触覚センサの製造プロセスを示す。作製は主にSiマイクロマシンニング技術を用いる。まず SOI ウェハ上に絶縁層として Si3N4、検知層のひずみゲージ薄膜としてNiCr、カンチレバーを傾斜させるための応力層として Cr、配線として Au をそれぞれ積層(スパッタリング)・パターニングする。その後、基板からカンチレバーをリリースするために、バッファードフッ酸(BHF)を用いて SOI ウェハの埋め込み酸化層を犠牲層としてエッチングする。カンチレバー構造が基板から切り離されると、基板の拘束から解放されてCrが縮むことにより、カンチレバーの断面内に応力分布が発生し、自動的にカンチレバーが基板から持ち上がった構造となる。この構造に対して、PDMSをスピンコートで塗布してカンチレバー構造全体をカバーし、最終的にPDMSであらかじめ作製した突起を接着してセンサとして完成する。
4. MEMS触覚センサの機能
4.1. 触覚計測
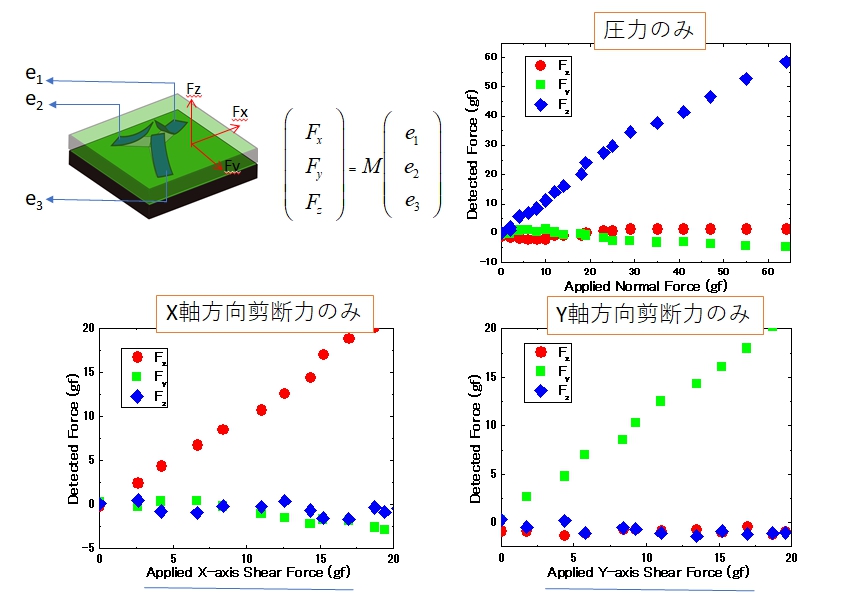
MEMS触覚センサのプロトタイプにはカンチレバー構造を三つ配置することで、センサの突起部先端にかかる外力を計測できる。図6に示ように各センサの出力をei (i:1〜3)として、あらかじめ各センサ毎に作製する構成マトリックスMと掛け合わせることで、センサに対して垂直な圧力とセンサに沿う方向の2軸の剪断力としてFk(k:x,y,z)を得る。それぞれの軸方向に作用させた外力を正確に分離できることが分かる。またPDMSが外力を変形に変換するトランスデューサであるが、この硬度を変化させることでMEMS部分の設計を変更することなくダイナミックレンジを変更できる。
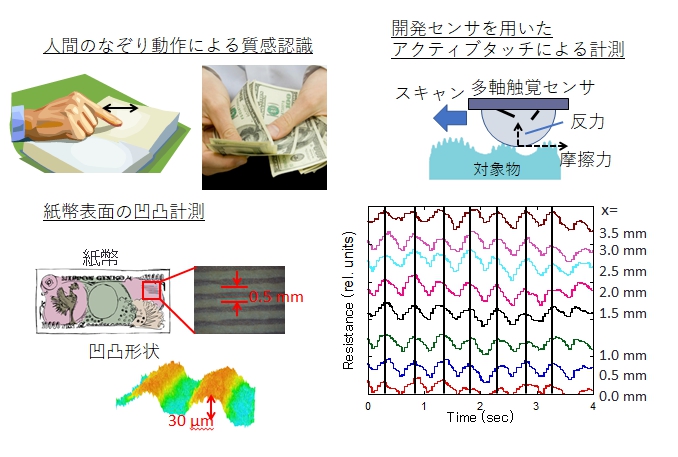
一方で、この試作センサの感度は極めて高い。図7に示すように日本の紙幣には偽造防止のためにインクで印刷された高さ30μm,幅500μmのスリット状の構造が設けられている。その表面をヒトがなぞると紙幣の真贋を見破ることができるが、同様にMEMS触覚センサでスリット部分をスキャンすると、図7に示すようにこれを検出できる。
4.2. ヒトを越える光学近接計測機能
さらに、このセンサを産業用ロボットに応用する上で有効な機能として、触覚計測に加えて光学近接計測機能も有している。生産ラインにおいてロボットが物体を掴むためには、あらかじめカメラなどで環境を計測し、対象物体近傍にロボットハンドを移動させたのち、指を物体表面に接触させる。その際に接触直前の近接情報は安定した把持のために極めて重要である。本センサでは制御が容易な光を利用した方法を採用し、距離検出の手法を実現した。
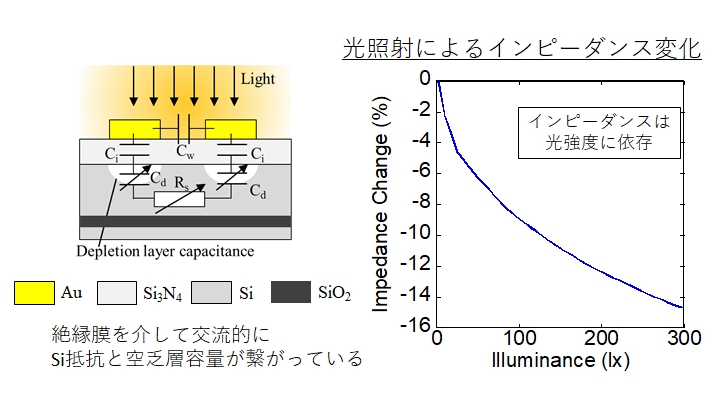
まず光検出の原理および手法について示す。図8はMEMS触覚センサのカンチレバーの検知部の二つの端子を通り基板に対して垂直な面で切った断面図である。Si でバイス層には、金属半導体間の仕事関数差により空乏層が存在すると考えられる。触覚検知のように端子 A,B 間の直流抵抗を測定する場合には、Si3N4 薄膜は絶縁膜として振る舞うため,NiCr ひずみゲージ抵抗の変化のみを検出する。
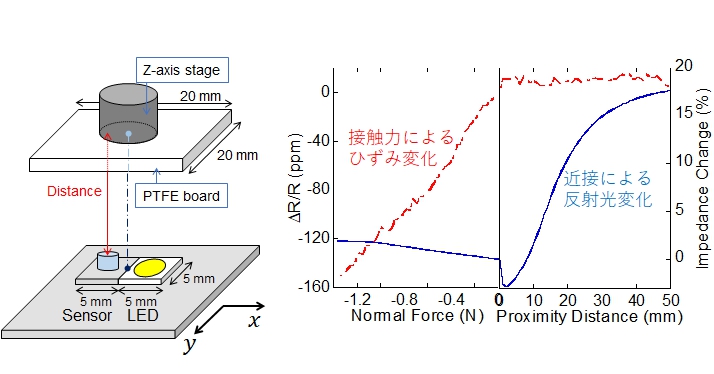
一方、端子間に交流信号を印加した場合、Si3N4 薄膜はキャパタとして振る舞うため、光照射によって半導体 Si 層に生成したキャリアにより、Si 層の抵抗 RSi および空乏層容量 Cd が変化する。つまり、センサへの入射光量を端子間の交流インピーダンス変化として検出することができるため、端子間で計測する信号の交流/直流を切り替えるという単純な方法で近接覚と触覚の2つの情報が検出可能となる。そこで図 9 に示すように触覚センサの傍に投光用のチップ LED を配置し、物体表面で反射してセンサに入射する光の強度が物体センサ間の距離により変化することを利用し、交流計測モードで接触までの距離を検出できる。
次週に続く-
謝辞
本稿のMEMSに関する図面は共同研究者である新潟大学寒川雅之准教授から提供を受けた。
【著者略歴】
野間 春生(のま はるお)
立命館大学 情報理工学部 情報理工学科 実世界情報コース
メディアエクスペリエンスデザイン研究室
1994年3月 筑波大学大学院 博士課程 工学研究科構造工学専攻修了 博士(工学)取得
1994年4月 株式会社国際電気通信基礎技術研究所 入社
2012年12月 株式会社国際電気通信基礎技術研究所 退社
2013年1―3月 Worcester Polytechnic Institute 客員研究員
2013年4月 立命館大学 情報理工学部 教授
学会役職
日本バーチャルリアリティ学会 理事(2019年−)
専門分野・研究テーマ
バーチャルリアリティ、触覚インタフェース、ウェアラブル&ユビキタスインタフェース