下条 誠
4.3 カメラモジュールの利用
カメラモジュールとゲルを組み合わせた触覚センサがある。物体によるゲルの接触変形をカメラにより高い空間的解像度で計測することでゲル表面の3D変形から物体の接触状態を解析する。
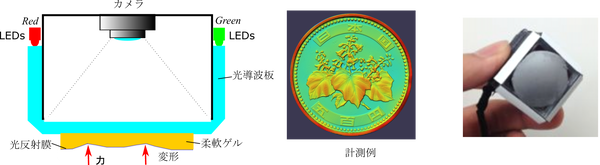
図7に例としてGelSightを示す11)。このセンサは反射膜をコーティングしたゲルを用い、物体が接触した時の変形を複数のLED照明(赤青緑色)を当て、カメラで計測する構造である。ゲル表面の3D変形から物体の接触状態が高空間分解能で計測できる。カメラを搭載するため指先形状寸法に制限はあるが、詳細な接触状態情報は把持・操り制御への可能性を感じさせる。
またゲルを透明にして、近接情報も計測するセンサがある12)。これらはカメラを搭載するため形状制約がある。ただし、最近ミラーを用いて薄型に構成したセンサも出てきた13)。カメラを利用した触覚センサは、視覚情報処理技術との相性もよく、ロボットハンドなどへの利用が進むかもしれない。
4.4 触・近接覚センサ
触覚は接触するまで検出できない。しかし、近接覚と統合することでセンサから数十cm程度まで離れた物体を検出できる。これにより視覚から触覚までシームレスにつなぐセンシングシステムができる14)。この触·近接覚センサは、近接覚を基礎として開発が容易だ。
図8には触・近接覚の例を示す15)。センサは、透明なPDMS(シリコーンの一種)の下に、フォトリフレクタ型近接覚(発光と受光を組合わせた素子)を配置した構造である。(a)物体がない場合、反射光はPDMS境界面からのみである。(b)物体が近づくと物体からの反射光が加算される。(c)物体接触後は、PDMSの変形量を反射光量から計測することで接触力を計測する。ただし、この方式は、対象物表面の反射率の影響を受ける。
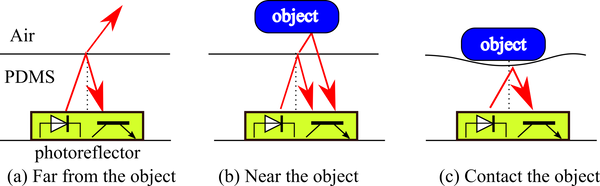
反射光強度から近接距離、接触力を計測する(Lammie et.al.)15)
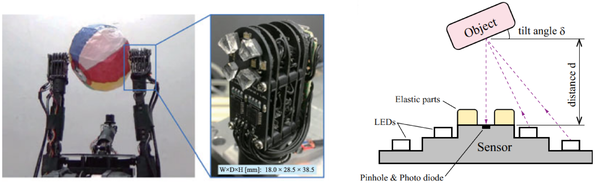
図9には複数個のフォトリフレクタ配置と点滅位相を工夫することで、物体表面の反射率の影響を受けず、高速(1ms)かつ高精度(50µm)な特徴があり、近接距離は無論、接触力を指先柔軟体変位より計測するセンサを示す16)。なお高精度·高速な近接覚は従来のレーザ距離計より精度は劣るが、薄型軽量安価なセンサとしても利用可能である。
このほか近接距離センサとして、TOF(Time of Flight) 方式がある。その原理は、光の往復時間(Time of Flight)から対象物までの距離を測る方式である。小型軽量で反射率の影響を受けないため使い易い。製品例として17)、測定レンジは0~100mm、応答は15msのものがある。但し、距離誤差が2mm程度あり、近接距離での制御への利用は難しいだろう。このように空間拡張型の触覚センサは、一つの発展の方向性を示すものと考える。
4.5 機械学習での利用が増加
近年、ロボティクス分野では触覚センサを用いた機械学習の研究が多くなってきた。機械学習は、視覚と触覚など異なる感覚モダリティーを統合する上で有効であり、数多くのパラメータが関係する制御設計が難しい動作に対して、新たなフレームワークとツールを提供する。ただし、機械学習は大量のデータを必要とする。しかし、触覚でのデータ取得は対象物に触れ、触運動により取得するため時間が掛かる問題がある。このため、シミュレーション利用する試み、および転移学習など各種学習方法の研究も行われている。
4.6 市販の触覚センサ
最後に触覚センサとして市販されているものをいくつか紹介する。それ以外にも多くあるが参考文献を参照していただきたい18)。
(1)イナストマー
圧力により抵抗値が変化する感圧導電性ゴムを用いて計測する19)。原理は、ゴム材料にカーボンなどの導電素材を混ぜ、弾性体ゴムの変形に伴って導電素材の相互接触が増減することで電気抵抗値が変化する特性を用いている。触覚センサとして簡便に使える。検出回路が簡単で、センサは薄型で耐久性があるなどの特徴がある。
(2) Tekscan
圧力により接触抵抗値が変化する感圧インクを用いて計測する20)。原理は、感圧インク表面の微小な凹凸部分の接触面積が圧力により増減し、電極間の電気抵抗が変化することから圧力を計測する。触覚センサとして簡便に使える。センサは薄いフィルム状(0.1mm)で、印刷による作成ため自由な形状と空間分解能が可能である。
(3)Pressure Profile Systems
電極間ギャップ距離の変化による静電容量変化から圧力を検出する方式である21)。原理は、弾性のある誘電体などを電極で挟み、電極間隔の変位による静電容量変化から圧力を検出する。薄型で構造が簡単、各種電極材料の利用が可能で設計の柔軟性があるなどの特徴がある。
(4)タッチエンス
発泡剤(スポンジ)と発光受光素子を組合わせ、力により変形する発砲材内の散乱光量変化を光透過性の変化から計測することで、力を計測する22)。スポンジ素材による「やわらかい」外装を持ち、三次元方向の変位検出が可能などの特徴がある。
(5)BioTac
BioTac は、伸縮性のある外装とコアの間を導電性流体で満たした構造のセンサである23)。外装フィルムの変形によるインピーダンス変化を、コア上の電極(19個)で検出することから、力を計測する。また滑りによる振動を流体圧力センサ、熱伝導率の違いによる温度変化をサーミスタにより検出している。
次週に続く-
参考文献
11) R. Li, R. Platt Jr., W. Yuan, A. t. Pas, N. Roscup, M.A. Srinivasan,E. Adelson: Localization and manipulation of small parts using GelSight tactile sensing, IEEE/RSJ Int. Conf, on Intelligent Robots and Systems, pp.3988-3993, 2014.
https://www.youtube.com/watch?v=w1EBdbe4Nes
12) A. Yamaguchi and C. G. Atkeson: Combining Finger Vision and Optical Tactile Sensing: Reducing and Handling Errors While Cutting Vegetables, IEEE-RAS Int. Conf. on Humanoid Robots, pp.1045-1051, 2016.
13) E. Donlon, S. Dong, M. Liu, J. Li, E. Adelson, A. Rodriguez: GelSlim: A High-Resolution, Compact, Robust, and Calibrated Tactile-sensing Finger, arXiv:1803.00628, 2018.
14) 下条誠, 小山佳祐、計測自動制御学会、56(10), pp.758-763, 2017
15) D. Hughes, J. Lammie and N. Correll: A Robotic Skin for Collision Avoidance and Affective Touch Recognition, IEEE Robotics and Automation Letters, 3(3), pp.1386-1393, 2018
16) K. Koyama, M. Shimojo, T. Senoo, M. Ishikawa: High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact, IEEE Robotics and Automation Letters, 3(4), pp.3224-3231, 2018. https://www.youtube.com/watch?v=UVMg2qdhdYs
17) https://www.st.com/ja/imaging-and-photonics-solutions/vl6180x.html
18) SlideShare: https://www.slideshare.net/secret/1yjCbOD2JOU68l
19) http://www.inaba-rubber.co.jp/index.html
20) https://www.tekscan.com/flexiforce-load-force-sensors-and-systems
https://www.youtube.com/watch?v=rzHiGQh2FNo
21) https://ja.pressureprofile.com/
https://www.youtube.com/watch?v=lvVJ9vG6H_k
22) http://www.touchence.jp/cube/index.html
https://www.youtube.com/watch?v=MHjZrrltpRA
23) https://www.syntouchinc.com/en/sensor-technology/
https://www.youtube.com/watch?time_continue=12&v=W_O-u9PNUMU
【著者略歴】
下条 誠(しもじょう まこと)
1976年 東京工業大学 総合理工学研究科 精密機械システム専攻修了
1976年 通商産業省工業技術院 製品科学研究所
1985年 – 1986年 スタンフォード大学 客員研究員
1993年 通商産業省工業技術院 生命工学工業技術研究所
1997年 茨城大学工学部情報工学科 教授
2001年 電気通信大学 知能機械工学専攻 教授
2016年 東京大学 大学院情報理工学系研究科 特任研究員
現在に至る
専門分野
ロボティクス・メカトロニクス研究、特にロボットハンドと触覚センシングの研究を行っている。具体的には、視覚と触覚情報を補完する近接覚センシング、薄く柔軟なすべり覚センサの研究、これらセンサを取付けたロボットハンドの研究開発など。