下条 誠
1. はじめに
触覚センサの研究は、視覚、 聴覚と比べて遅れている1)。これは視覚、 聴覚センサが検出器レベルを過ぎ認識など情報処理レベルが主なのに比べ、まだ触覚センサは検出方式レベルの研究が多く、応用への取り組みが未開拓な感覚である。
触れることは人間にとって最も基本的な動作であり、物を掴んだり操ったりする動作では触覚の重要な役割がある。ロボティクス分野において、より高い機能の実現や安全性のため、触覚は無くてはならない感覚である。また人間において触覚は、コミュニケーション手段としても大切な役割を担っている。近年タッチパッド などで触覚を用いた操作が当たり前のようになってきた。このように、より直感的で使いやすい情報機器の利用には触覚は必要不可欠である。本解説では、触覚の役割とは何か、最近の研究開発動向、そして触覚センサに望まれる機能について解説を行う。
2. なぜ触覚か
最近の触覚技術への注目は、触覚の特徴を生かした次のような利用への期待があると考える(図1)。
(1) 触覚を付加することで、新たな価値を導入し、商品の差別化・高級化を図る。
(2)より自然なインターフェースを実現する。すなわち、視覚・聴覚・触覚の融合により、「見て、聞いて、触れる」、「見て触って操作する」ことを目指す。
(3)人工の皮膚を実現する。薄型で伸縮性のある触覚センサを実現させ、ヘルスケア、スポーツ、ゲームでの利用、ウェアラブルセンサなどIOT機器への応用を目指す。また触れて認識し、巧みな制御を行う人工の手を実現する。人工の手による巧緻な作業の実現は、これまで人間でしかできなかった各種作業を代替し、社会に革命的な展開をもたらす。

最近、触覚センサは大きな進展がみられる。センサ開発では、有機トランジスタなどを用いた印刷技術や、導電性高分子繊維などを用いた織物技術など、従来とは異なる技術を用いた「E-skin」2)3)、「E-textile」4)の研究開発が増えてきた。これらは従来にない薄型で伸縮性のある触覚センサを実現させ、印刷技術などで製造した安価なセンサの利用が進む可能性がある。これらの利用分野は、ヘルスケア、スポーツ、ゲームでの利用など従来分野とは異なる広がりを見せている。またロボティクス分野ではディープラーニングなどでの触覚の利用が増加している。これは多指ハンドによる巧緻な作業では、視覚と触覚の協調により、ロバストで、より高性能な操りが可能となるためである。
また、触覚を空間的に拡張する近接覚の開発が盛んになってきた。触覚は接触するまで検出できない。しかし、近接覚と統合することでセンサから離れた物体を検出できる。視覚は手前にある物体が背後にある物体を隠すオクルージョンの欠点がある。近接覚は、この欠点を解消し、接触して検知する触覚までをシームレスにつなぐセンシングシステムを実現する。
3. 触覚センサの構成
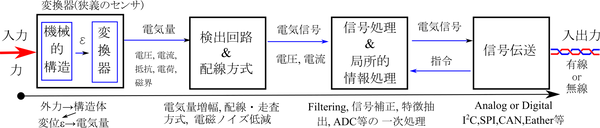
図2に触覚センサの構成を示す。センサは、1)接触力を電気量に変換する変換器(検出素子)、2)電気量の検出回路、3)信号・情報処理回路、4)信号伝送回路から構成される。
変換器は、外力による機械的構造の変形(歪み)を、抵抗、静電容量などの電気量に変換する。この変換部のみを狭義の触覚センサと呼ぶこともある。ロボットは厳しい電気ノイズ環境下で使用するため、センサ内部で信号処理を行い、ノイズに強い方式を用いて伝送する。これらの局所的情報処理はMPUなどを用いて局所的に実行し、適切な方式で伝送することが、S/N 比を高め、省配線化を進めるため重要である。
次週に続く-
参考文献
1) 五感情報通信技術に関する調査研究会報告書,
http://www.soumu.go.jp/main_sosiki/joho_tsusin/policyreports/chousa/gokan_index.html
2) T. Yang, D. Xie ,Z. Li, H. Zhu: Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and device performance, Materials Science and Engineering: R: Reports, vol.115, pp.1-37, 2017.
3) M. Park, B. Bok, J.H. Ahn and M.S. Kim: Recent Advances in Tactile Sensing Technology, Micromachines, 9(7), 321,2018.
4) C. Gonçalves, A.F. da Silva,J. Gomes and R. Simoes: Wearable E-Textile Technologies: A Review on Sensors, Actuators and Control Elements, Inventions, 3(1), 14 ,2018.
【著者略歴】
下条 誠(しもじょう まこと)
1976年 東京工業大学 総合理工学研究科 精密機械システム専攻修了
1976年 通商産業省工業技術院 製品科学研究所
1985年 – 1986年 スタンフォード大学 客員研究員
1993年 通商産業省工業技術院 生命工学工業技術研究所
1997年 茨城大学工学部情報工学科 教授
2001年 電気通信大学 知能機械工学専攻 教授
2016年 東京大学 大学院情報理工学系研究科 特任研究員
現在に至る
専門分野
ロボティクス・メカトロニクス研究、特にロボットハンドと触覚センシングの研究を行っている。具体的には、視覚と触覚情報を補完する近接覚センシング、薄く柔軟なすべり覚センサの研究、これらセンサを取付けたロボットハンドの研究開発など。