
大学院生命体工学研究科
教授
石井 和男
1. 研究室の概要・特徴
安心安全で持続可能な社会の実現、少子高齢化への対応、第一次産業を始めとした産業基盤の再構築等の社会的な課題に対して、産業競争力会議において新たな成長戦略に「ロボットによる新たな産業革命」が示されたように、解決策の一つとしてロボット技術の社会実装が期待されている。筆者らもロボット関連研究者と共に九州工業大学社会ロボット具現化センター(現,未来社会ロボット実装センター,図1参照)を立ち上げ,研究成果の社会実装を念頭に研究を進めている。筆者らは、水中ロボットの開発に携わっており1)2)、現在も農業分野も含め西田准教授や安川准教授と連携してフィールドロボットに関する研究を行っている3)4)。
フィールドロボットの研究において重要な要素の一つが研究成果を評価するための“場:フィールド”の確保である。2003年から日本発の競技会であるRoboCup5)の中型サッカーリーグに参加し、マルチエージェントシステムやロボットの協調行動について研究を行っているが、バレーボールコートサイズの大きさの実験場が必要であり、その確保は課題であった。水中ロボットの研究において実海域での実験のためには、海上保安庁や漁業共同組合への実験の届出と承認、警戒船、潜水士の契約等、様々な実験準備が必要である。多くの労力、予算を必要とすることから、関係する研究者と連携してロボット競技会を企画・開催、“場”を提供し、必要とされる技術課題を競技会のルールとして取り入れながら競技会を通じて研究活動及びアウトリーチ活動を行う取り組みを進めている。水中ロボットに関しては2006年に神戸で第1回水中ロボットフェスティバルを開催して以来、毎年開催し6)、農業用ロボットの開発に関してはトマト果実の収穫能力を競うトマトロボット競技会7)を2014年から開催している。ロボット競技会を積極的に活用しながらフィールドロボットの研究を行っている (図2参照)。

2. 研究内容・テーマ・実績
ここでは水中ロボットに関する研究成果を紹介する。遠隔操作型水中ロボット(Remotely Operated Vehicle: ROV)や自律型水中ロボット(Autonomous Underwater Vehicle: AUV)などの水中機器や水中音響システムの技術開発と利用の進展とともに、深海底の調査や船舶、洋上風力発電装置などの海洋構造物の検査・調査・清掃・修理が現実のものとなっている。日本海事協会は2020年に「AUV/ROVに関するガイドライン」8)を公表して、水中ロボットを用いた水中検査の推進を図ろうとしている。
2.1. 船底清掃ロボット(ROV)の開発
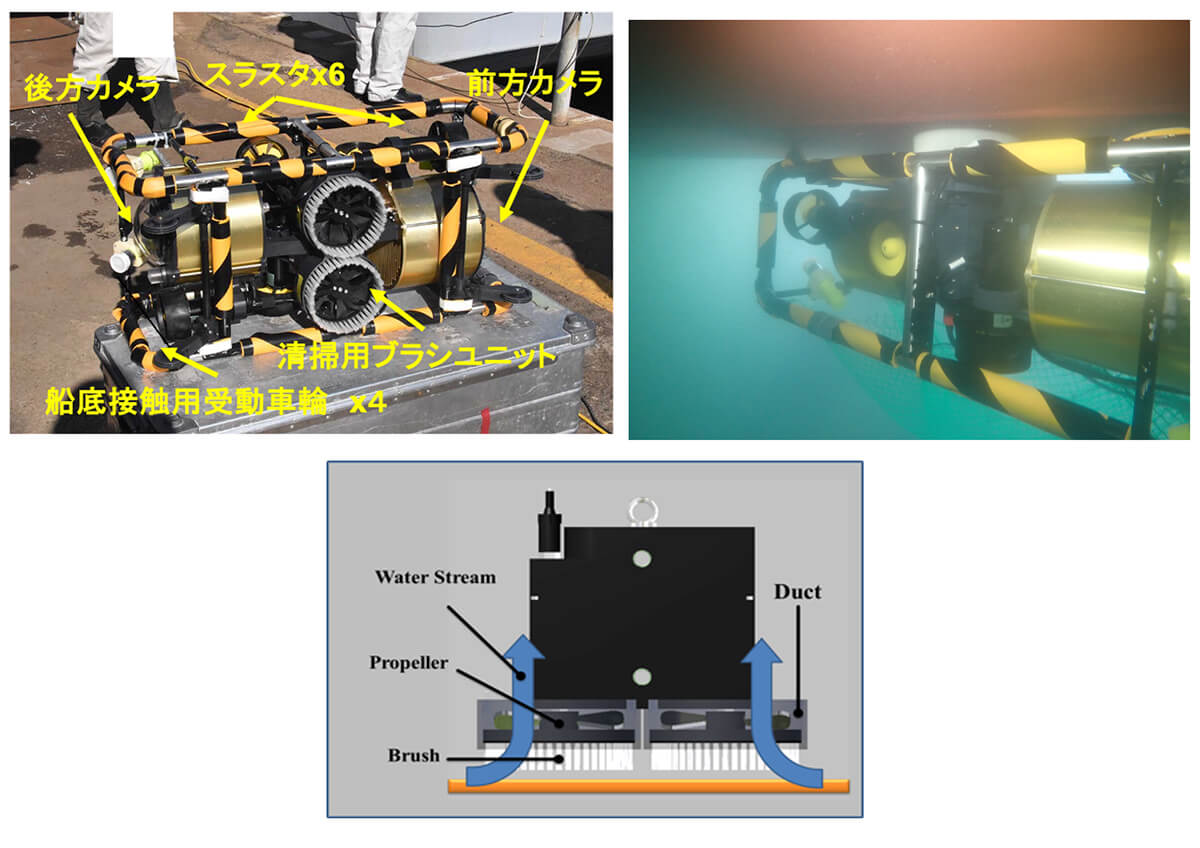
日本は世界有数の貿易大国であり、輸出入における99.8%を海上輸送が占めているが、船舶による輸送においてもCO2の削減が求められている。CO2排出量増加の要因として船底に付着するアオサ等の海藻類やフジツボ等の貝類が挙げられ、特に船舶が長期間停泊した場合には、多くの海洋生物が船底・船側面に付着し水流の抵抗となり燃費が増加することが報告されている9)。対策として定期的な船底の清掃が期待されており、著者らは図3に示す遠隔操作型の船底清掃ロボットを開発し、国土交通省 海の次世代モビリティの利活用に関する実証事業等を活用しながら実証実験を進めている10)。
船底清掃ロボットは中央部のブラシで船底を清掃しながら移動し、水を吸引して船底に吸着する仕組みとなっている。ロボット中心に対して点対称に配置された6基のスラスタの推力により移動し、前後に取り付けられたパン・チルトカメラで清掃面や前方の映像を取得することが可能である。清掃ロボットは3次元形状の船底に吸着して移動するため、通常の水中ロボットとは異なり任意の姿勢を取りうる。そのため重心と浮心を近づけ復元力を小さくする設計としており、制御アルゴリズムに工夫を要する。
2.2. AUVによる海底生物サンプリング
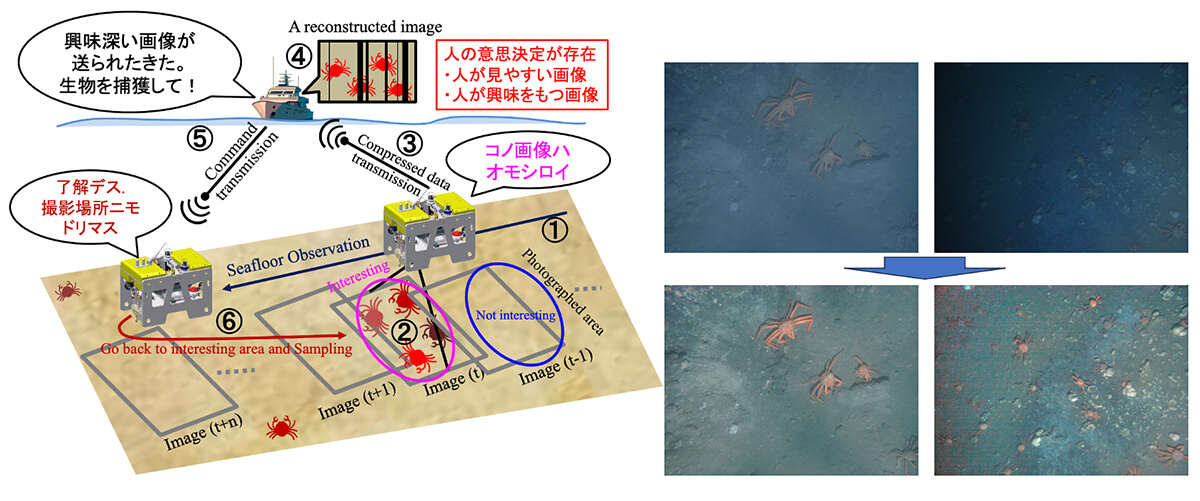
日本でのAUV研究は、浦らの「PTEROA計画」(1986年)に始まる11)。2012年にはAUV3台を海底熱水鉱床発見が期待される海域において同時展開することに世界で初めて成功しており12)、近年では民間企業もAUVによる海底調査サービスを提供している13)。AUVはケーブルによる拘束が無いため自由に行動できる一方、ロボットとして自己完結している必要があり、高いシステム信頼性が求められる。著者らもJST CREST 海洋生物多様性において、浦がPIを務めた「センチメートル海底地形図と海底モザイク画像を基礎として生物サンプリングをおこなう自律型海中ロボット部隊の創出」14)に参画し、AUVによる生物サンプリングシステムの開発を行なった。そのコンセプト図と水中画像処理の様子を図4に示す。AUV:Tuna-Sand215)は予め設定した測線に沿って移動し、興味深いと判断した画像を支援船に送信する。送信は超音波通信によって行う。そのため、データ通信量に制限がある中で支援船の観測者が判断しやすい画像とする必要があった。全体の制御ループに人の判断が入るシステムであり、画像処理に関してだけでも水中画像の鮮明化16)、興味画像の選択、画像の圧縮17)等の課題があった。海底からのサンプリングのためには、深度センサとDVLの高度情報を組み合わせた高度維持制御、サンプリング対象物のトラッキングのための2段階ビジュアルサーボ制御18)等、多くの課題があったが東海大渡邉らの協力を得て駿河湾 水深100mにおいて2枚貝の捕獲に3回連続成功した。
3. 今後の方向性・展望
AUV、ROVともに水中調査・作業のためのツールとして、研究段階から社会実装段階に移行しつつある。前述した研究課題は、海中環境という制約の中でロボットを実際に活用して作業させるという目的のもと、目的に向かう過程において次々と現れ悩まされたものであり筆者らが当初想像できていなかったものが多い。ロボットの研究開発は近年のコンピュータに代表されるICT技術の発展の恩恵を多々受けており、新たな技術が水中ロボットの可能性や適用範囲を拡げ、さらに次の研究課題に挑戦する機会を与えてくれる。社会に対して「ロボットでこんなことができるんだ」と少しでも提示できるよう微力ながら尽力したい。
九州工業大学 フィールドロボット研究室(石井和男研究室)
https://www.brain.kyutech.ac.jp/~ishii/
参考文献
- Ishii K., Fujii T., Ura T., An On-Line Adaptation Method in a Neural Network Based Control System for AUVs, IEEE Journal of Oceanic Engineering, Vol.20 No.3, pp. 221–228, 1995, DOI:10.1109/48.393077
- 石井和男,藤井輝夫,浦環, 水中ロボットとニューラルネットワーク, 日本ロボット学会誌, Vol.22 No.6, pp.727 – 731, 2004, DOI:10.7210/jrsj.22.727
- 佐藤雅紀,神田敦司,石井和男, 不整地移動ロボットのための環境適応型制御システム,日本ロボット学会誌, Vol.27 No.8, pp.950-960, 2009, DOI:10.7210/jrsj.27.950
- 藤永拓矢,安川真輔,石井和男, 施設園芸を対象としたトマト果実自動収穫ロボットの開発, 日本ロボット学会誌, Vol.39 No.10, pp.921-925, 2021, DOI:10.7210/jrsj.39.921
- https://www.robocup.org (2024.4確認)
- 有馬正和,石井和男,渡邉啓介, 水中ロボットと競技会を通じた工学教育,計測と制御, Vol.47 No.10, pp.817-823, 2008, DOI:10.11499/sicejl.47.817
- 石井和男, 松尾貴之, 武村泰範, 園田隆, 川尻一志, 西田祐也, トマト果実の自動収穫能力を競うトマトロボット競技会, 日本ロボット学会誌, Vol.39 No.10, pp.921-925, 2021, DOI:10.7210/jrsj.39.921
- https://www.classnk.or.jp/hp/ja/index.html ログイン後、マイページのガイドラインから (2024.4確認)
- 横井 幸治,船底汚損が船速に与える影響について, 富山商船高等専門学校研究集録, 第37号,pp.17-27, 2004
- https://www.mlit.go.jp/sogoseisaku/ocean_policy/content/001732015.pdf (2024.4 確認)
- 浦環, 前田久明, 海中ロボット研究グループ, 生産研究, Vol.44 No.7, pp.29-31, 1992
- https://www.u-tokyo.ac.jp/focus/ja/press/p01_241105.html (2024.4 確認)
- https://www.ideacon.co.jp/technology/detail/20231019154926.html (2024.4 確認)
- https://www.jst.go.jp/kisoken/crest/research_area/completed/bunyah23-3.html (2024.4確認)
- Nishida Y., Sonoda T., Yasukawa S., Nagano K., Minami M., Ishii K., Ura T., Underwater platform for intelligent robotics and its application in two visual tracking systems, Journal of Robotics and Mechatronics, Vol.30 No.2, pp.238–247, 2018, DOI: 10.20965/jrm.2018.p0238
- Ahn J., Yasukawa S., Sonoda T., Ura T., Ishii K., Enhancement of deep-sea floor images obtained by an underwater vehicle and its evaluation by crab recognition, Journal of Marine Science and Technology, Vol.22 No.4, pp.758 – 770, 2017 DOI:10.1007/s00773-017-0442-1
- Ahn J., Yasukawa S., Sonoda T., Nishida Y., Ishii K., Ura T., An Optical Image Transmission System for Deep Sea Creature Sampling Missions Using Autonomous Underwater Vehicle, IEEE Journal of Oceanic Engineering, Vol.45 No.2, pp.350 – 361, 2020, DOI: 10.1109/JOE.2018.2872500
- Yasukawa S., Ahn J., Nishida Y., Sonoda T., Ishii K., Ura T., Vision system for an autonomous underwater vehicle with a benthos sampling function, Journal of Robotics and Mechatronics, Vol.30 No.2, pp.248 – 256, 2018, DOI:10.20965/jrm.2018.p0248
【著者紹介】
石井 和男(いしい かずお)
九州工業大学・大学院生命体工学研究科・教授/未来社会ロボット実装センター・センター長
■略歴
- 1996年09月東京大学 工学系研究科 船舶海洋工学専攻 博士課程修了 博士(工学)
- 1996年10月東京大学生産技術研究所 研究員
- 1996年12月九州工業大学情報工学部 講師
- 1998年06月同 助教授
- 1999年04月東京大学生産技術研究所 協力研究員(〜2018年3月)
- 2002年04月九州工業大学大学院生命体工学研究科 助教授(准教授)
- 2003年04月Fraunhofer AIS 客員研究員 (〜2004年02月)
- 2011年04月九州工業大学大学院生命体工学研究科 教授(現在に至る)
- 2013年04月九州工業大学社会ロボット具現化センター 副センター長(併任)
- 2018年04月同 センター長 (併任、現在に至る)
- 2018年04月長崎総合科学大学 客員教授(併任、現在に至る)