
博士(工学)
山本 郁夫
1.研究室の概要と特徴
長崎大学山本郁夫研究室は先進的ロボットの研究開発を目的に2013年に開設された。工学系の学生、研究員ら約40名で構成されており、海洋、航空宇宙、車両、医療の分野の様々なロボット、メカトロニクスを開発している1) 2)。特に、実フィールドで役立つ先進的ロボットを生み出すことを開発の信念としている。
海洋ロボットは水中ロボット、船ロボットに分けられ、海洋環境観測や海中構造物モニタリング等の海での実ミッション成果を多々生み出している。学生は毎年入れ替わるため、鍛錬の場として沖縄海洋ロボットコンペティションに毎年出場している。
コンペティションとは縁が深く、2013年に筆者が沖縄ポリテクにて宇宙ロボットの講演を行った際に、海で使えるロボットを念頭に学生の教育の場として海洋ロボコンを開催できないかとポリテク関係者と議論となり、講演翌日に沖縄ポリテク、九州ポリテクの先生方らと内閣府沖縄事務所に海洋ロボコンの構想提案と大会後援をお願いに行ったことに始まる。
水中ロボットは海水で動かすことが難しく、真水中で開発したロボットはなかなか海水で動かない。それならば、最初から海で動かすことを目的に開発した方が良いとの理由でコンペティションを提案した。
内閣府、沖縄県、大学、高専、ポリテク、企業他の後援を得て2014年にプレ大会、2015年から本大会を実施し、コロナでの開催危機にも見舞われたが、毎年継続して実施することができ、今年は第10回目の記念大会に至っている。弊研究室は初回から出場している。
2014年プレ大会では全体で2機しかロボットは動かなかったが、近年は20機近くまで海中で動くロボットが増えている。参加校の技術レベルが上がっていることは当初の開催目的に叶い、喜ばしい限りである。その中で、弊研究室は沖縄までロボットを持って行って動かすという難しさの中、良好な成績を納めることができ、遠隔地でのミッション遂行能力向上も含めコンペティションを通して着実に技術力が向上している。
2.沖縄海洋ロボットコンペティションの実績
プレ大会から出場しているため、ROV部門最優秀賞4回、優秀賞2回、同部門ノーマルタスク 最優秀賞1回、優秀賞1回、同部門知能・計測チャレンジ最優秀賞2回、フリースタイル部門特別賞、同部門最優秀賞3回、優秀賞2回の成績である。

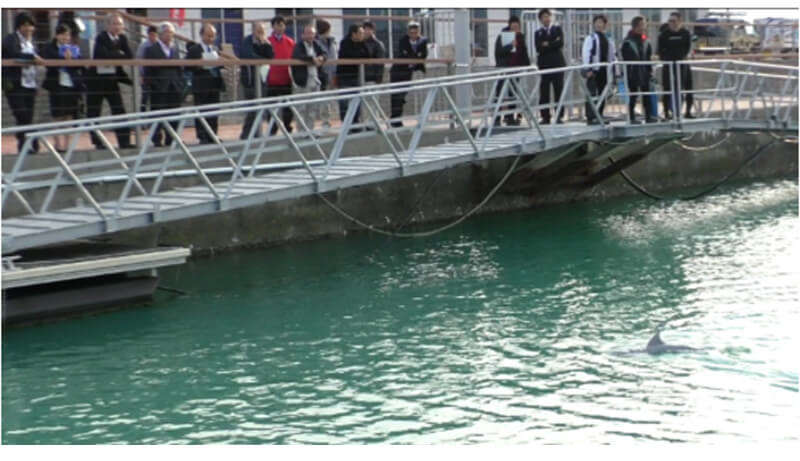
プレ大会では、イルカロボット(図1)を海水中で遊泳させて(図2)、審査員らよりこのようなロボットを未だ見たことがないとの高評価を得てフリースタイル部門特別賞を頂いた。弊研究室は北九州市立大学の山本郁夫研究室を継承しており、そこで博士号収得を指導した卒業生の勤務する大学と共同で高機動ROV(図3)をROV部門に出場させ、波浪中唯一競技ミッションを達成し、最優秀賞を得た。小型軽量が特長である。
2015年第1回でも同じROVで出場したが、イの一番の航走で海面に釣り糸がたくさん浮遊しており、プロペラにそれが巻き付いて機動力が損なわれた。それでも2位となり優秀賞を得た。
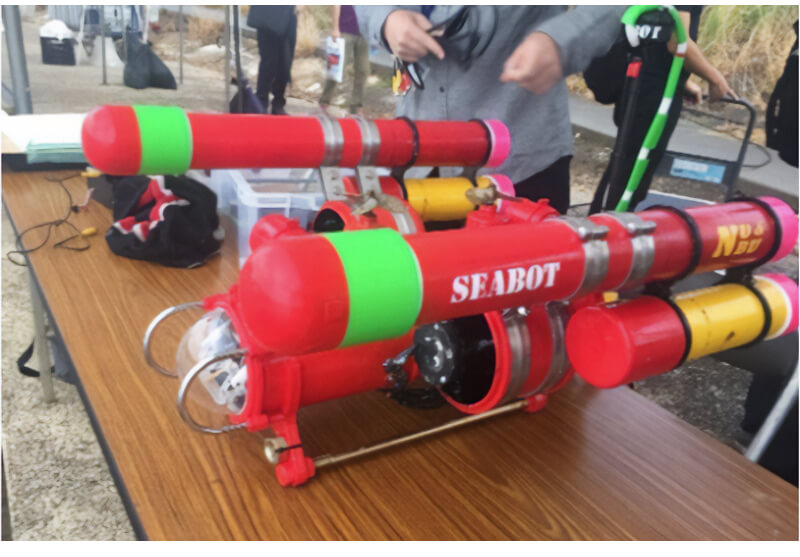
2016年第2回では航走機動性をさらに高めたSEABOT(図4)を開発し、ROV部門最優秀賞を得た。また、エイの翼とサメの尾びれを合体させたRAYBOT(図5)を遊泳させてフリースタイル部門で最優秀賞を得た。

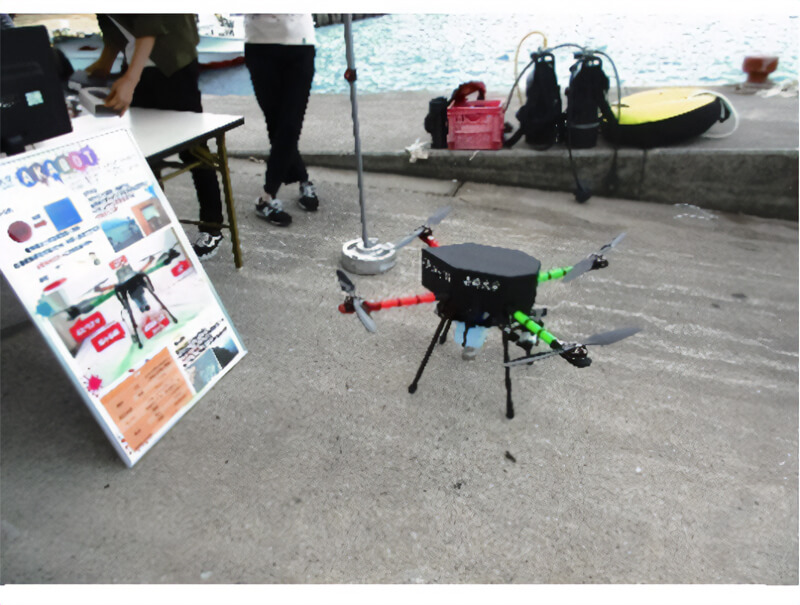
2017年第3回ではSEABOTⅡを出場させたが、目標認識がバーコードに変わり、水中カメラ映像で捉えているのにバーコード読み込みができないトラブルで競技点が得られなかった。フリースタイル部門では赤潮プランクトン採水を目的としたAKABOT(図6)を実演し、優秀賞を得た。海のドローンの先駆けである。
2018年第4回ではSEABOTⅢをROV部門に出場させ、課題のバーコード読み込みはクリアできた。しかしながら起動時に回線接続ミスで始動が遅れ、2位となり優秀賞を得た。フリースタイル部門では船ロボットのUKIBOTを実演し、最優秀賞を得た。

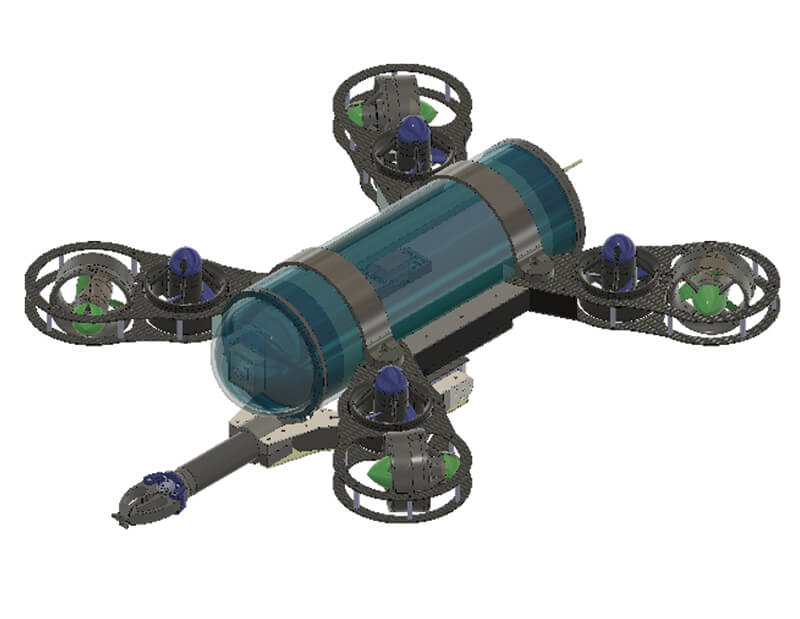
2019年第5回ではスーツケースのような開閉方式で始動直前の回線接続チェックを容易にしたCAIBOT(図7)をROV部門に出場させ、最優秀賞を得た。また、新たに始まった知能・計測チャレンジ部門にAIによる構造物亀裂認識機能を具備したSmart CAIBOTを出場させ、潮流下での海中構造物亀裂の自律探査、映像捕捉保持を行うことができ、最優秀賞を得た。また、フリースタイル部門で船ロボットの機動性を強化したUKIBOTⅡを実演し、最優秀賞を得た。2020年はコロナ感染症蔓延による出張禁止のため出場を見送った。
2021年第7回はROV部門ノーマルタスクでCAIBOTⅢ(図8)を出場させ、最優秀賞を得た。知能・計測チャレンジタスクでもCAIBOTⅢは最優秀賞を得た。

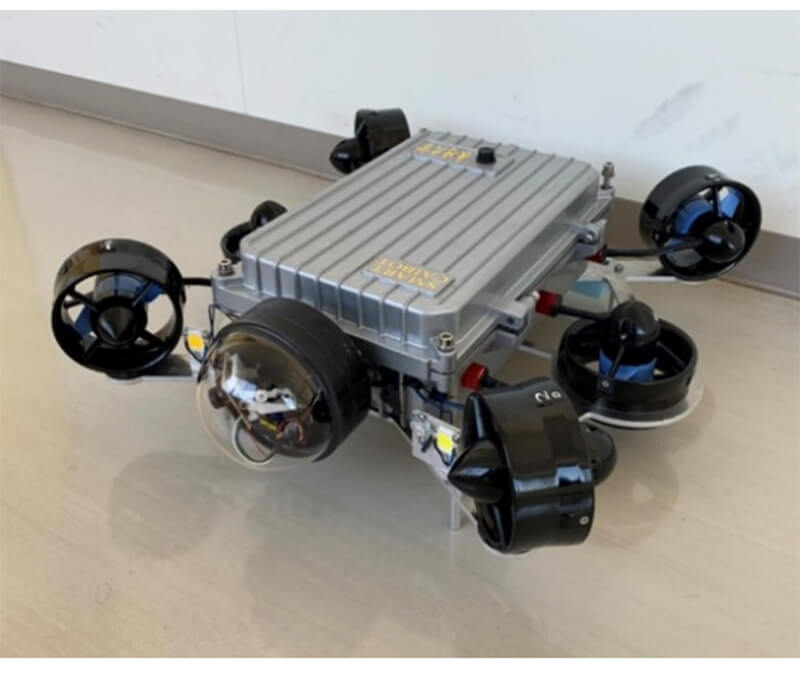
2022年第8回では、ROV部門ノーマルタスクでロボットハンド具備のROV☆STAR(ロブスター)(図9)が最優秀賞、REMONA(図10)が優秀賞を得た。REMONAは外乱下での定点保持力を強化したROVであり、知能・計測チャレンジ部門で最優秀賞を得ている。2023年第9回ではREMONAがROV部門知能・計測チャレンジ部門で最優秀賞を得ている。

3.今後の方向性と展望
沖縄ロボットコンペティションを通して学生の海洋ロボット開発能力は確実に向上している。コンペティションという目的に向かって、設計、製作、実験を行い、失敗しても次は確実にミッションを遂行する力が育まれている。コンペティションを通して様々なアイデアが生まれ、チームとしてミッションを達成するためのコミュニケーション力も養われる。
この能力は社会に出て産業界のシステムを創り出すときに必ず役に立ち、企業からも海洋という極限環境でのロボットの開発力を有していることから評価が高い。卒業生の多くは、大手電機、重工、自動車、機械、半導体などの産業界に進んでいく。願わくば海洋産業の市場がもっと成長し、コンペティションで競い合っている海洋ロボットの分野での活躍も期待したい。
また、参加に要する費用が不足しているため毎年資金難に陥るが、コンペティションを実務ミッションでの海洋ロボット開発と実証と位置付けて、今後も出場を続けていきたい。
長崎大学 山本郁夫研究室
Nagasaki University Ikuo Yamamoto Laboratory Japan
URL:https://robotics-mech-nagasaki-univ.conohawing.com/
参考文献
- Ikuo Yamamoto,Practical Robotics and Mechatronics,IET (The Institution of Engineering and Technology, UK),Control,Robotics and Sensors Series 99,ISBN978-1-84919-968-1(2016)
- 山本郁夫, 水井雅彦, 基礎から実践まで理解できるロボット・メカトロニクス, 共立出版, 2013
【著者紹介】
山本 郁夫(やまもと いくお)
長崎大学副学長・教授 博士(工学)
Prof. Ikuo Yamamoto, Dr. Eng. Vice President, Nagasaki University, Japan
■略歴
1983.3 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985.4 三菱重工本社技術本部、2004.4 海洋研究開発機構、2005.4 九州大学大学院総合理工学府教授、2007.4 北九州市立大学教授、2013.4長崎大学教授、2019.4 同大学副学長。GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業(株)で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型無人飛行体、水中ロボット、船ロボット、本物そっくりに泳ぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでロボットの創出法に関する本など多く執筆している。内閣府総合海洋政策本部参与会議自律型無人潜水機(AUV)戦略PT有識者委員。