
岩国海洋環境試験評価サテライト長
岡部 幸喜
1.はじめに
令和5年4月に閣議決定された第4期海洋基本計画1) において、水中無人機等の海洋ロボティクスも含めた海洋におけるイノベーションの促進がうたわれており、これを受け、我が国の技術的な潜在能力を十分発揮して、国内外のニーズに即したAUVの国産化・産業化の実現に向けて、「自律型無人探査機(AUV)の社会実装に向けた戦略」2)(以下、「AUV戦略」という)が令和5年12月に政府の総合海洋制作本部により策定された。(本稿では自律型無人探査機も含め、水中で利用される無人機を便宜上「水中無人機」と呼ぶ。)
AUV戦略の策定により水中無人機の各種研究開発や利用の促進が今後推進されていくこととなるが、水中無人機は通信が難しい水中で利用されることから非常に高い自律性を有する必要があり、実用化にはこの高い自律性を十分に試験評価する必要がある。自律性に関する試験評価はあらゆる海洋環境や運用シナリオで行う必要があるが、それらを全て海上試験で行うことは、スケージュールやコスト及び亡失等のリスクの点からもほぼ不可能である。更には、自律性を向上させるための膨大な学習用のデータ取得も必要となる。これらの問題を解決するために、防衛装備庁では陸上で水中無人機の各種試験評価を効率的かつ効果的に行うことができる施設として、令和3年9月1日に岩国海洋環境試験評価サテライト(IMETS)が山口県岩国市に開所した。(図1)

2.試験装置の概要
IMETSは、シミュレーション技術を利用することで、①実海面投入前の水中無人機の十分な技術実証、②技術実証に必要な実海面試験回数の低減、③亡失をはじめとする実海面試験に伴うリスク低減を実現するために整備した試験評価施設である。
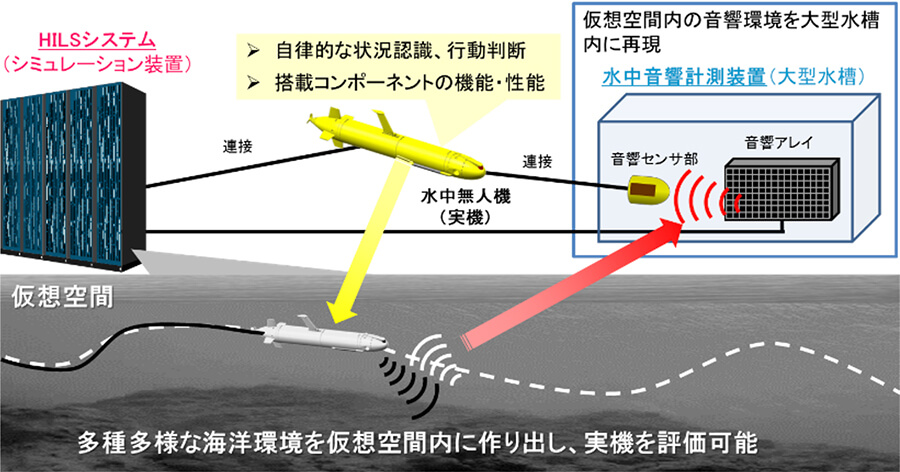
試験評価のための主要な装置として、シミュレーション装置である「HILS(Hardware In the Loop Simulation)システム」と大型水槽である「水中音響計測装置」を有しており、これらの装置を用いて仮想的な海洋環境を構築することで水中無人機のシミュレーション試験を実施している。
シミュレーション試験では、HILSシステム上の仮想空間に多種多様な海洋環境を作り出し、水中無人機の機能・性能をソフトウェアでモデル化したバーチャルの水中無人機(デジタルモデル)を仮想空間内の海洋を航走させることでシミュレーションを行う「マスマティカルシミュレーション」はもちろんのこと、HILSシステムに試験評価の対象となる水中無人機実機を接続することでデジタルモデルと実機を連携させ、実機があたかも仮想空間内の海洋を航走している状態を作り出しシミュレーションを行う「フィジカルシミュレーション」の2つの方式で試験評価等を行うことができる。
また、水中では音によって周囲の状況を認識することから音響センサの重要性は極めて高いことから、「フィジカルシミュレーション」では、仮想空間の海洋でデジタルモデルの音響センサに入力されるバーチャルの音響信号を大型水槽内に本物の音として再現させ、実機の音響センサがその音を聴いて周囲の状況を認識し行動判断を行うというシミュレーション試験も実施することが可能である。この機能を音響模擬機能と呼んでいるが、これはIMETSにしかない特殊な機能である。(図2)
以下に各装置の詳細について紹介する。
2.1 HILSシステム
HILSシステムは大きく分けて「モデリング機能」、「シミュレーション機能」及び「音響模擬機能」の3つの機能を有する他、各種水中音響機器の計測機能を有している。
モデリング機能:
水中無人機のデジタルモデルを作成する機能であり、任務の異なるさまざまな水中無人機を評価できるように、水中無人機の形状や運動特性などの水中無人機全体の振る舞いを模擬するプログラム、各搭載機器の機能、性能等を模擬するプログラム及び高度な自律性に必要となる状況認識や行動判断などを行うための管制プログラムを、汎用的に広く利用されているMatlab/Simulink3) で作成することができる。このため、作成した各プログラムは実機への組み込みも容易に行うことができる。
デジタルモデルのミドルウェアには、拡張性に優れ近年ロボット用ソフトウエアプラットフォームとして多く使用されているROS2(Robot Operating System2)4) を採用している。ROS2は拡張性に優れ、ロボット開発に必要なライブラリとツール群を利用することができる他、外部で作成されたROS2準拠のプログラムを容易に取り込むことも可能である。また、運動やシグネチャなどの水中無人機全体の振る舞いを模擬するプログラムとの通信やデジタルモデルとその他のシミュレーションのプログラムとの間の通信は共有メモリを介したDDS(Data Distribution Service)5) 通信により行っている。(図3)

シミュレーション機能:
シミュレーションを実施する海域の海底地形、水温、塩分濃度、潮流等を設定し、これらの海洋環境データを基に仮想の海洋環境をHILSシステム上に作り出している。海洋環境データは一般的に使われているnetCDF(Network Common Data Format)6) 形式で扱っており、外部からのデータを容易に取り込むことも可能となっている。
また、シミュレーション開始から終了までの水中無人機他の行動を規定するための行動シナリオやミッションシナリオを自由に設定でき、更には水中無人機の搭載機器等の故障等のタイミングや発生内容を設定できる。
シミュレーション実行中においては、水中無人機の航行状況を3D画面で表示することでシミュレーションの状況を可視的に表示することができるとともに、搭載機器の取得データなどの情報をリアルタイムで確認することができる。
シミュレーションを行える最大時間は30日間と長時間であるため、シミュレーションを行う前にその時間見積もりを確認できる機能や途中でシミュレーションを中断した場合でもつづきからシミュレーションを再開できる機能を有している。
音響模擬機能:
広さが有限である水槽内で音を送信すると壁面等で音が反射することから音響水槽では吸音材等によって音の反射を抑制している。しかしながら、吸音材では完全に音を吸収できないことから、意図した音を音響センサに入力するには反射音の影響を考慮した音を送信する必要がある。
これを実現するのが音響模擬機能であり、HILSシステムでは事前に大型水槽内の伝達関数を計測し、その逆フィルタを用いることで壁面等の反射音も考慮した音を音響アレイから送信させることができ、これにより大型水槽内の音響センサにデジタルモデルに入力される音を本物の音として入力することを可能としている。
音響模擬機能では送受波チャンネルを最大164CHまで対応しており、サンプリング周波数も400kHz以上と音響センサの測定範囲としては十分な帯域を確保している。
水中音響機器の計測機能:
水中無人機の搭載機器務含めた各種水中音響機器の感度校正を行う「感度校正機能」及び水中音響計測装置のトラバーサと組み合わせて水中音響機器の指向性計測を行う「指向性計測機能」を有している。
次回に続く-
参考文献
- “海洋基本計画”、閣議決定、令和5年4月28日、
http://www8.cao.go.jp/ocean/policies/plan/plan04/pdf/keikaku_honbun.pdf - “自律型無人探査機(AUV)の社会実装に向けた戦略”、総合海洋政策本部、令和5年12月22日、
http://www8.cao.go.jp/ocean/policies/auv/auv_strategy/pdf/auv_strategy2312.pdf - https://jp.mathworks.com
- https://index.ros.org/doc/ros2
- https://www.dds-foundation.org
- http://www.unidata.ucar.edu/software/netcdf
【著者紹介】
岡部 幸喜(おかべ こうき)
防衛装備庁 艦艇装備研究所 岩国海洋環境試験評価サテライト サテライト長
■略歴
- 1998年防衛庁入庁
技術研究本部第5研究所(現艦艇装備研究所)においてソーナー関連の研究開発に従事 - 2015年防衛装備庁技術戦略部技術計画官付総括班長として、岩国海洋環境試験評価サテライトの整備に従事
- 2021年9月岩国海洋環境試験評価サテライト開所とともにサテライト長として着任、現在に至る。