
國分 祐作
1 はじめに
近年、海上での基本的な作業を自動化しようという取り組みが、海中ロボット(Subsea Robotics)市場を急成長させている。この海上作業の自動化は、海上作業員の安全性向上、各作業員の負荷軽減、プロジェクトのコスト削減、そして、二酸化炭素排出量の削減といった環境負荷の削減につながることが期待されている。歴史的には、海中ロボットは石油・ガスなどの市場における無人探査機である遠隔操作型無人潜水機ROV(Remotely Operated Vehicle)に限定されていたが、近年ではより高度な機能を有するROVや人間の操作を必要としない自律型無人潜水機AUV(Autonomous Underwater Vehicle)へと多様化が進んでいる。これらの高度な水中ビークルが自身の挙動を決定する際には、機体に搭載している各種センサ類からの情報に大きく依存している。したがって、高精度な水中ナビゲーションを実現するために各種センサ類の性能に対する要求が年々高まってきている。本稿の前半では中でもドップラ速度ログ(DVL)センサについてそのしくみと性能向上への取り組みについて紹介し、後半では小型水中ビークルを対象として新開発されたDVLセンサとその使用事例について紹介する。
2 水中ナビゲーションについて
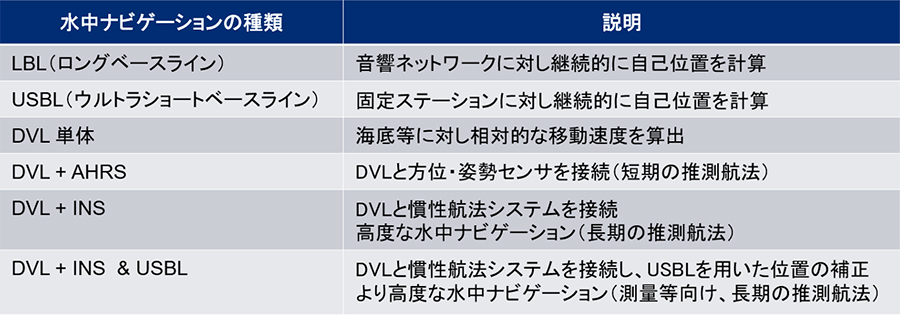
水中ではGNSS衛星からの信号が届かないため、水中ビークルの自己位置を推定するためには、機体に搭載されたセンサ類から取得される情報を頼りに水中におけるナビゲーションを実行する必要がある。この水中ナビゲーションには、機体に搭載されたセンサ類と共に、水上・水中の位置を基準に自己位置を推定する方法や、推測航法(Dead Reckoning)と呼ばれる方法を用いるなど、水中ビークルの運用環境や用途に応じて選択されている(表1)。航続距離が長い自律航行や、複雑な水中構造物の中を航走するといった用途においては、推測航法が使用されることが多い。
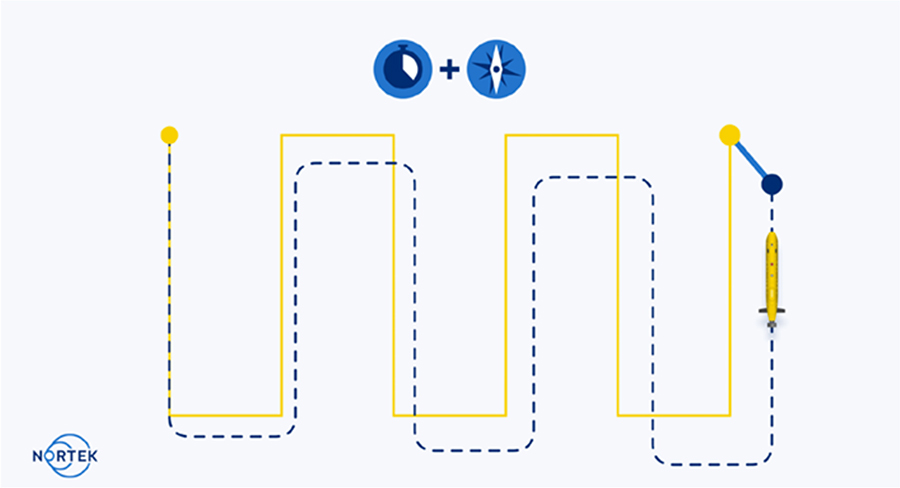
推測航法とは、方位、速度、タイミングセンサからの出力を統合し、演算処理を行うことで、移動体の時間的な位置変化を継続的に把握して行う航法である。これは多くの場合、GNSSまたは他の絶対測位システムより得られた既知の開始位置を基準として実行される。推測航法では、決められた時間間隔で位置の算出を行い、その積分を行うことで現在位置が算出されるため、各センサの誤差は時間と共に累積する(図1)。そのため、最終的な位置の誤差は、機体に搭載されているセンサの性能に密接に関係する。
水中ナビゲーションが用いられる例としては、潜水士用のハンドヘルド・システムといったコンパクトな機材から、数千キロもの航続距離を持つような全長数メートル級の探査・測量用大型AUVまで様々である。また、自己位置の把握は、自律的な航行の用途の他、探査・測量データに地球上の座標情報を付与するために必要とされている。
3 ドップラ速度ログDVL(Doppler Velocity Log)とは
推測航法など、各種水中ナビゲーションにおいて重要な役割を担うのがDVLである。DVLは、ボトムトラッキング (Bottom Tracking、海底検知)と呼ばれる、水中の基準となる面(海底等)に対する相対速度を計測する技術を用いた音響センサである。なお、この「水中の基準となる面」は、垂直配置された壁面や水中構造物の天井など、海底に限られないため、本稿では以降「基準面」と記載する。大きな特徴として、基準面に対する相対速度を経時的なドリフトや偏りが発生すること無く計測できる。
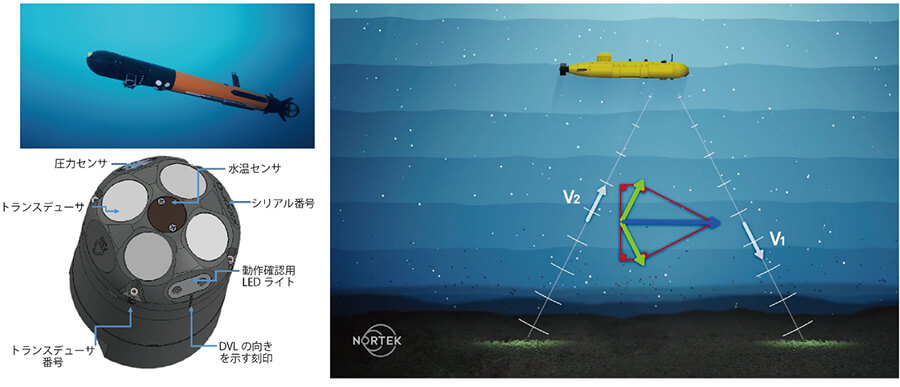
DVLは、音波の送受波器となっているトランスデューサ(探触子)を3つ以上持ち、それぞれ異なる方向を向くように配置している(図2)。この3つ以上のトランスデューサから音波パルスをそれぞれ基準面へ送信し、この面から反射されてトランスデューサへ到達した反射波(エコー)に対してドップラ効果を用いて周波数解析を行う。この結果、各トランスデューサ面に対し垂直方向の速度が得られる。その後、設計上既知となっているトランスデューサの配置された角度(向き)から、DVLの正面方向を基準とした3軸の直行座標成分へ速度を分解し、最終的にDVLの基準面に対する移動速度が得られる(図2)。3つ以上のトランスデューサを用いることで、基準面に対する三次元速度が得られる。
推測航法は、この速度情報と共に、方位センサから得られるDVL(または機体)の方位情報(進行方向)と組み合わせて演算処理を行うことで、実行することができる。そのため、DVLは方位センサを含む慣性センサを持つ慣性航法装置(Inertial Navigation System、INS)と組み合わせて使用されることが多い。近年では、DVLとINSの接続の際に必要な接続・校正作業を不要とする、DVLとINSが一体化された製品も登場している。
一方、DVLを単独で水中ビークルに搭載し、速度計として用いる場合もある。特に、水中ビークルを水流がある環境下において運用する場合、位置を自動で保持する定点保持(ステーションキーピング)と呼ばれる機能が有効になる。速度情報は、水中ビークルがスラスタ等の駆動部を水流に対抗するように自律的に動作させるために使用される。
4 DVLの性能を決定する主な要素
DVLの性能は、1)計測レンジ、2)計測精度、3)計測時間管理の3つの要素が重要であるとされる。
1) 計測レンジ
- 長い計測レンジを持つDVLは、潜航後の早い段階から基準面(海底等)を検知することが可能となり、水深方向においてビークルの運用可能な範囲が広がる。
- 基準面(海底等)の検知には精度の良いボトムトラッキングアルゴリズムの設計が必須である。
- Nortekが独自に開発したボトムトラッキングアルゴリズムは、基準面からの反射音波の識別能力を高めることで、ノイズ等の混入シグナルによる誤検出の低減を実現している。その結果、音波減衰が発生しやすいような、基準面が遠方にある状況においても、精度良く基準面を捉え、速度の算出が可能となっている。
2) 計測精度
- 計測精度の高いDVLを使用することで、自律航行等で設定された計画された航路からの逸脱(位置ドリフト)を低減することができる。
- 同一の音響周波数を用いた場合、計測精度と計測距離は反比例する傾向がある(計測距離増加にて計測精度低下)。同様に、音波帯域と計測距離に関しても同様な反比例の傾向がある(音波帯域狭にて計測距離増加)。そのため、同一音響周波数を使用した場合において、計測距離を延ばすために帯域を狭めた音波パルスを使用した場合には、計測距離は増加する一方で計測精度が低下する要因となる恐れがあり、注意が必要となる。
- Nortek社では、可能な限り広い帯域の音波パルスを用いることに重点を置いてトランスデューサやDVL全体の設計がなされている。一般的には使用する音波の帯域が広くなるほど基準面からの反射音波を識別することが容易になるため、計測精度が高くなる。ただし、帯域を広く取るほど計測可能な距離が短くなるため、計測精度と計測距離の適正なバランスが重要となる。前項の独自開発されたボトムトラッキングアルゴリズムは、計測精度を保ちつつも計測距離を延ばすことに貢献している。
3) 計測時間管理(タイムスタンプ付与)
- DVLとINSを統合して推測航法を行う場合、各計測データの時間情報(タイムスタンプ)の誤差が、推測航法全体の誤差に直結する。そのため、データが取得された際の時間情報を可能な限り正確に管理する必要がある。
- DVLとINSは、時間同期と通信の確立が、可能な限り精度よくなされていることが不可欠である。
- Nortek社のDVLには、有効時間(Time of validity)と呼ばれる機能が搭載されている。この機能によって、音波パルスの発信時刻や受信時刻を時刻情報とするのではなく、音波パルスが実際に基準面に到達した時刻を判別して時刻情報として使用することができる。従って、INSも音波が海底に到達した正確な時刻を演算に用いることができる。これは、基準面までの距離が大きい場合や、航走速度が速い場合など、音波パルスが基準面とビークル間の水中を伝搬している間に水中ビークルの移動が生じるような状況において、特に位置誤差の低減に貢献する。
5 Nortek社製DVLの例
DVLには様々な形状、サイズ、音響周波数を持つ機種が存在する。DVLの音響周波数は、計測可能な距離をある程度決定付ける。低周波数の音波パルスに対応した機種は高周波数に対応した機種よりも長い計測距離を持つが、低周波数の音波パルスを発生させるためにトランスデューサの寸法を大きくする必要があるため、機器の重量と寸法が高周波数の機器よりも増加する傾向にある。 INS等の慣性センサと接続することで水中ナビゲーションを実現するNortek社製DVLには、計測レンジや耐圧性能により合計8種類の機種がある(図3)。機種名「DVL」に続く数字は、各機種が使用する音響周波数がkHzにて表示され、製品名となっている。DVL1000の場合、1MHz(1000kHz)の音響周波数を使用している。これらDVLシリーズは長期精度0.1%を実現しており、長期間の自律航行への貢献が期待される。

次回に続く-
【著者紹介】
國分 祐作(こくぶ ゆうさく)
Nortekジャパン合同会社 代表
■略歴
- 2011年独Leibnitz Institute for Baltic Sea Research 招聘研究員
- 2012年JFEアドバンテック株式会社 入社
- 2014年東京海洋大学大学院 海洋科学技術研究科 修了 博士(海洋科学)
- 2017年Nortekジャパン合同会社 入社
2018年より現職
■執筆歴
センサイトWEBジャーナル:
「超音波ドップラー式流向流速プロファイラー(ADCP)の技術とその応用」
(1) https://sensait.jp/12234/
(2) https://sensait.jp/12235/