
東京支社 海洋開発部
高橋 裕和
1. はじめに
私たち深田サルベージ建設株式会社は、社名からイメージされる「海難救助」、「鉄構工事」、「海洋土木」、「重量物輸送・曳航」に加え、近年では「海洋開発」及び「洋上風力」といった海中・海底、オフショアにも事業範囲を広げている。新たな事業を展開していく中で、積極的に深海設備機器(海中ロボット)によるオペレーションにも挑戦し、現在に至っている。
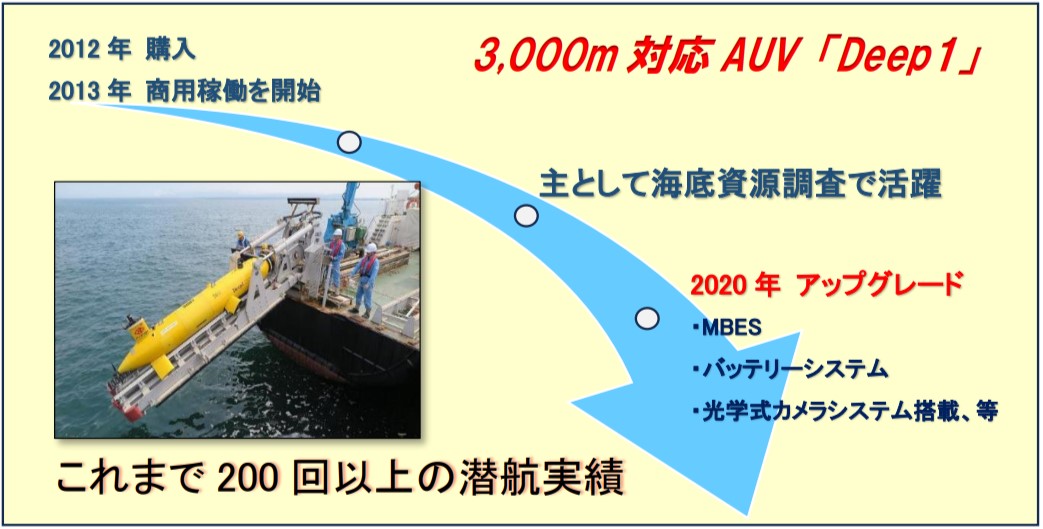
本稿では、2013年から商用運用を開始した自律型潜水探査機 (Autonomous Underwater Vehicle; AUV)「Deep1」の10年間の活用を振り返る。気が付けば2024年2月現在まで、計200回以上の潜航を経験してきた。探査計測の各論は参考文献に譲るとし、AUV「Deep1」の基本的な性能を紹介しながら、活用の変化や苦労した機材管理についてお話しするのでお付き合い願いたい。
2. AUV「Deep1」の導入(2013年)1), 2)
2000年以降、陸上資源の枯渇や希少金属への需要が高まり、世界的に海底資源への注目が高まってきた。これに伴い、従来の船舶(洋上船)による探査方法だけでなく、有索式潜水探査機(ROV)やAUVによる精密探査の役割が大きくなってきた。弊社は、2012年に水深3,000m対応のAUVを購入し、2013年1月の業務から商業オペレーションを開始している。
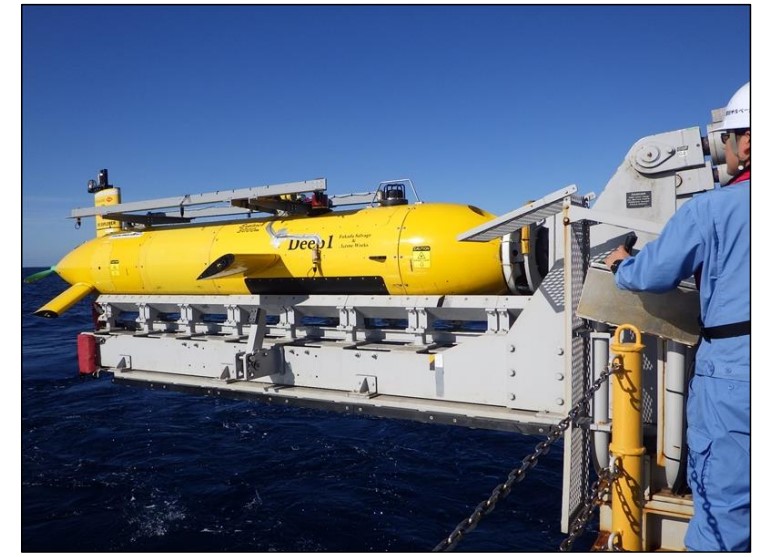
Deep1の外観の写真を図2に示す。このAUVはカナダInternational Submarine Engineering (I.S.E)社製Explorer型と呼ばれる機体であり、同じくカナダHawboldt Industories社とI.S.E社が共同開発した軽量Ramp型投入揚収装置(LARS)により海中投入・揚収される。AUV導入時、その支援母船は弊社所有船舶「新海丸(339トン)」であった。(後に新竜丸(698トン)に変更)
I.S.Eエンジニアによると、(国防等を除けば)精密な海底地形図や洋上船では調査が困難な氷海下の環境調査のためにAUVを購入する顧客が多いという。一般に、AUVに求められる主要な計測は、マルチビーム測深機(MBES)、サイドスキャンソナー(SSS)、サブボトムプロファイラ(SBP)による海底地形図・海底堆積プロファイルであろう。弊社AUV「Deep1」運用開始についても、最初は海底熱水鉱床の調査、表層型メタンハイドレートの探査が中心であった。
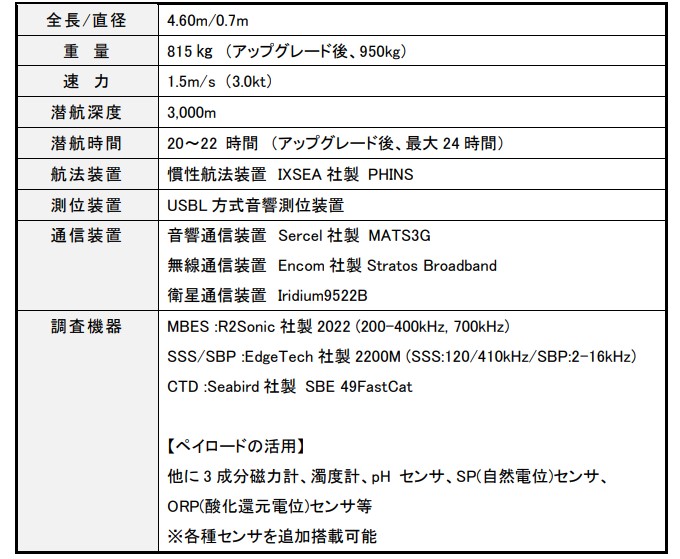
AUV「Deep1」の主要項目を表1にまとめる。Deep1にはセンサ類の追加搭載が可能なペイロードがある。表1の調査機器の項目にあるように、これまで顧客の要望に応えて多様な物理・化学センサを搭載し、調査潜航に貢献してきた実績がある。
AUV「Deep1」の航行は、無線による「パイロットモード」と自律航行及び音響制御下による「ミッションモード」で制御される。
パイロットモードは、支援母船上のオペレータが海上航行しているDeep1との無線操縦である。AUV投入してから潜航まで、調査潜航を終えて浮上してから揚収までの操縦はこのモードで実行される。
ミッションモードとは、支援母船から懸架された音響トランスデューサとDeep1側との相互の音響通信で航行制御されるものと、事前に作成された潜航・調査プログラムをDeep1ビークル側にインストールすることでプログラムに沿った航行を行うものである。Deep1投入後は、潜航段階により使い分けている。例えば、潮流の影響を受けてDeep1が大きくドリフトした際には、音響通信による位置情報を更新することになる。また航行中、障害物回避システム(OAS)が作動することにより、水中衝突や接触を未然に防止することもミッションモードの自律制御によるものである。
潜航中のDeep1の航行状況は、音響通信装置及び音響測位装置により支援母船のモニターで監視されている。
3. Deep1のアップグレード(2020年)
資源調査を中心にAUV「Deep1」を運用してきたが、客先からはより正確な情報が望まれるようになった。そこで2019年、Deep1をI.S.E社へ返送し、オーバーホールとともに搭載機器がアップグレードすることとなった。アップグレードの内容は、(1) MBES、(2) 光学式カメラシステム、(3) バッテリーシステムとなり、同時期に(4) HiPAPによるGAPSのバックアップ、(5) 支援母船の変更を行っている。
R2Sonic社製MBESのビーム数を256本から1024本に増やすことで最大4倍の解像度を得た。この解像度から海底熱水鉱床のチムニーの「煙突状の形」がより得やすくなることが期待できる。加えて、ウォーターカラムを計測することにより、水中異常を取得することでプルームの可視化が可能となる。これまではSSSによる2D情報だけであったが、3Dで座標を取得することができる。
通常、海底面の様子を知るには、SSSの音響によるイメージを取得する。一部、パイプライン等の保守整備を目的としたサーベイでは、安心して接近できる環境下で光学式カメラが使用されていると思う。このときDeep1に搭載した光学式カメラシステムはこれまで見たシステムより高性能であると感じた。
AUV下面のトップとテールにストロボライト(省電力LEDライト)を搭載し、巡航しながら光学式カメラの写真、すなわち自然色に近い画像を得られるようになった。
電力を消費する光学式カメラシステムを搭載することもあって、AUVビークル内に搭載されているバッテリーシステムも刷新した。バッテリー個数を9個から11個に増加し、潜航時間は最大24時間となった。
海中を航行するビークルにとって、音響測位のデータは重要なファクタである。このデータによって、航行する機体の位置と深度が決定され、計測データと整合される。音響測位装置GAPSをフルメンテナンスすると同時に、そのバックアップシステムについて検討した。
新たなAUV支援母船「新竜丸(698トン)」には、ROV用の音響測位装置HiPAP(Kongsberg社製)が既設であった。あるとき、AUV運用チームの一人から「このHiPAPをGAPSのバックアップに使用できないか」というアイデアが出され、Deep1でも利用可能となった。このHiPAPによる音響測位は、万一、GAPSが不調となった際の使用だけではない。GAPS/HiPAPを切り替えることにより、より高品質な測位データを取得することが可能になったのである。
次回に続く-
参考文献
- 大貫裕志 他:3000m 級自律型無人探査機「Deep1」について, 第25回海洋調査技術学会研究成果発表会, 2013
- 大辻由希 他:AUV(Deep1)の可搬式軽量ランプ型着水揚収装置(LARS)および船上一次処理ソフトウェアの開発, 日本水路協会第 28 回水路技術奨励賞, 2014
【著者紹介】
高橋 裕和(たかはし ひろかず)
深田サルベージ建設株式会社 東京支社 海洋開発部 部長代理
■略歴
- 1991年東海大学大学院海洋学研究科海洋工学専攻修士課程修了
- 2004年新日本海事株式会社
- 2005年深田サルベージ建設株式会社、現在に至る