
東京支社 海洋開発部
高橋 裕和
4. 巡航式フォトサーベイの海域試験(2021年)3)
海底資源調査において、写真情報は音響的イメージより情報量が多く、サイドスキャンソナー(SSS)イメージの「癖」を知らない者でも海底状況を直感的に理解しやすい。しかしながら、I.S.EエンジニアからこのCathx Ocean社製の光学式カメラシステムを紹介されたとき、「複数の画像を繋ぐことでツギハギ跡が残って見づらい結果にならないか?」、「さほど鮮明な画像にはならないのではないか?」といった疑問を投げつけた。彼らは「空中ドローンの画像解析を応用するのでツギハギは気にならない」、「2方向から光を当てるので、レンズ直下の浮遊物をある程度は写らなくできる」と回答してきた。にわかに信じづらかったが、実際にバンクーバーのフィヨルド「Indian Arms」の撮影テストに立ち会った際には、岩場に潜むカニやヒトデまで正確に写った画像を見せられて大変驚いた。
弊社は、巡航型AUVに光学式カメラを搭載したこの撮影手法を「巡航式フォトサーベイ」と名付けた。
カナダI.S.E社で本システムを搭載後、巡航速力1.5m/sによる効率的な潜航条件を知るため、駿河湾三保沖の沈船撮影(水深130~140m)の海域試験を行った。衝突回避のためAUV高度8mとし、重複率確保のため測線間隔1m、重複率:縦方向64%・横方向86%(使用画像723枚)で潜航、撮影を行った。
撮影効率を上げるためには測線間隔を広げ、取得画像の横方法の重複率を下げたい。この解答を得るため、取得したデータをもとに、測線間隔2m/重複率73%、3m/60%、4m/46%の設定でオルソモザイク図の比較を行った。搭載されたシステムの機材配置及び測線間隔を図3に示す。
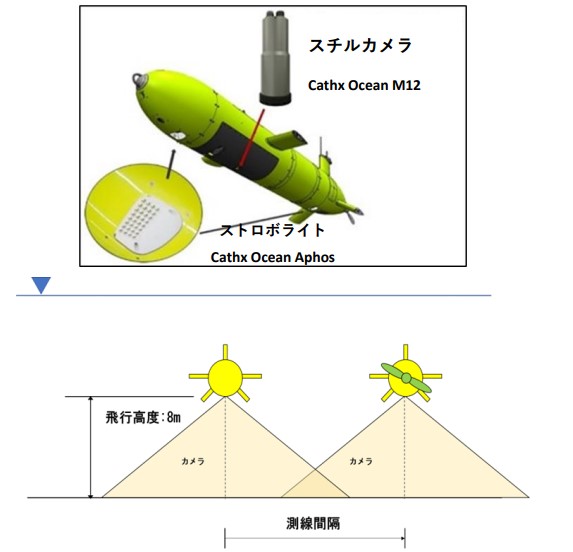
本海域試験の結果、AUV飛行高度8m、速力1.5m/sの場合、測線間隔3m、横方向の重複率60%以上が最適との結果を得ることができた。この結果から、AUV「Deep1」が18時間の潜航を行った場合、291,600m2の面積、分かりやすく換言すると「東京ドーム球場、約6個分」の海底撮影が可能であることがわかった。沈船の撮影結果を図4に示す。(取得画像からモザイク図作成までの解析・処理は川崎地質会社の協力による)
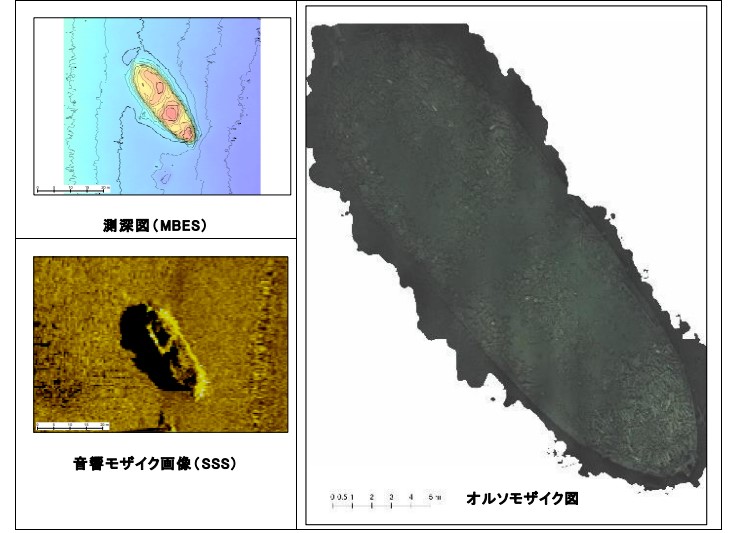
このような巡航式フォトサーベイによる写真撮影と、MBESやSSSの計測結果を組み合わせることで、海底資源量評価の確度が更に向上することが期待できる。
5. 維持管理の苦労(2023年)
センサ関連のジャーナルでは蛇足かもしれないが、最後にAUVをはじめとする深海機器の維持管理についてお話ししたい。
AUVやROVといった深海機器は「1ダイブ・1トラブル」と言われるくらい、警報アラームが鳴る。潜航時に発生した警報、機器不具合に関する情報も、この10年間でそれなりに蓄積された。品質管理の視点から、約40の不適合・不具合記録をもとに、「業務中の不適合発生ゼロ(メカダウン・ゼロ)」を検討した。
故障しない機械(AUV)など存在しないし、緊急時のために2機目のAUVを常時待機させるわけでもない。AUV運用チームの目標は、「業務中」の機器トラブルによる客先の仕様の未達成を回避するため、「業務外」の時間にやっておくべきことを整理・シナリオ化・実行することである。
これは「機器の不具合」と「業務の不適合(弊社ISO9001マニュアルの定義)」とは異なることを意味している。機器に不具合が発生にても、予備品を準備して短時間で交換し、調査潜航が再開できれば、それは「予備品の準備・交換作業の習得」という予防処置が機能したことを意味する。よって「業務中の不適合」ではない。このシナリオ化の概略図を図5示す。
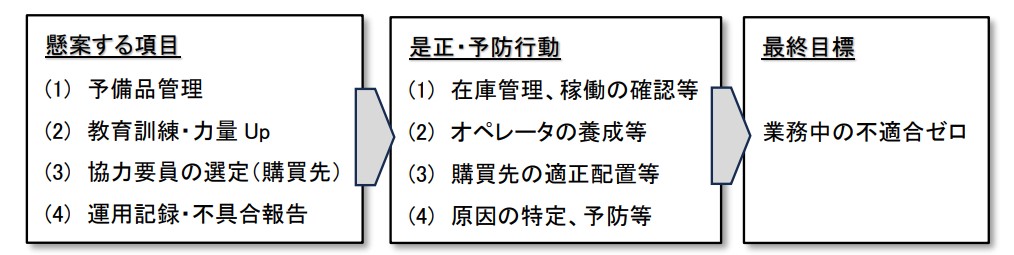
過去の約40の不適合・不具合情報を整理すると、その対策は(1) 予備品管理、(2) 教育訓練及び力量アップ、(3) 協力要員の選定、(4) 運用記録・不適合等報告書の活用の4項目に分類された。これら4項目を達成するためのアクション(是正策)をシナリオ化し、最終的には唯一つの目標「業務中の不適合発生ゼロ(メカダウン・ゼロ)」達成の確度を上げていく。すなわち、これは弊社の安定したAUVオペレーションの提供が「客先の仕様書の達成」と完全にシンクロすることを意味している。
これからも事前のシナリオ化を充実させることにより、弊社は引き続きAUV1機体制で安定したオペレーションを継続していくだろう。
6. おわりに~2024年、これからの活用
本稿では、弊社所有AUV「Deep1」の導入からアップグレードの歴史、新たに提案している巡航式フォトサーベイとAUVの維持管理についてお話しした。
近年の海洋環境に関する課題は、海洋ゴミ・マイクロプラスチック、生物資源量把握、海底構造物の保守等、多く存在する。海中に適用できるセンサは無数に存在する。これまでの海底資源調査の域にとどまらず、新たな目標に適合したセンサをDeep1のペイロードに搭載することで、この機体は更に変化して海洋環境問題に挑んでいくだろう。本稿を読まれたセンサイト協議会関係者の方々との出会いに大いに期待しながら、ペンを置かせて頂く。
参考文献
- 浅野由香 他:AUV「Deep1」による巡航式 Photo Survey, 第 29 回海洋工学シンポジウム, 2022
【著者紹介】
高橋 裕和(たかはし ひろかず)
深田サルベージ建設株式会社 東京支社 海洋開発部 部長代理
■略歴
- 1991年東海大学大学院海洋学研究科海洋工学専攻修士課程修了
- 2004年新日本海事株式会社
- 2005年深田サルベージ建設株式会社、現在に至る