
山本 郁夫
4.魚ロボットの概要
生物の運動からヒントを得て開発された魚ロボットはAUVの一種に分類される。
海中の生物の生活環境を乱さずに観測できる。本物そっくりに泳ぎ、カメラを搭載すれば海中生物の自然体な生息状況を観測できる。開発の歴史は以下の通りである。
1995年にケーブルなしで本物そっくりに泳ぐ魚ロボットを開発した。魚ロボットは図10に示すように魚の鰭のように振動して推進力を生み出す弾性振動翼7)、弾性振動翼を振動させるモータ、魚ロボットの動きを制御する制御コンピュータ4)、魚ロボットの外界・内界の状態を感知するセンサシステム8)、位置を検知するソナー、外界を撮影するカメラ、電源であるバッテリー、バッテリーへ充電する電力を制御する充電システム、浮力材、浮力を調整するバラストタンク、バラストタンクの注排水を行うポンプ、無線によって情報を通信する無線情報通信システム等で構成される。また、尾鰭の振動翼の動きは実際の魚のストローハル数に合わせている。結果、本物そっくりの泳ぎを実現する鯛ロボットを開発した(図11)。この系統で、1997年にシーラカンスロボット(図12)とバッテリー自動充電自律遊泳システム、鯉ロボット(図13)、金の鯱ロボット(図14)、鮪ロボット(図15)の開発に至っている9)。シーラカンスロボット以降は尾鰭のみならず胸鰭等複数の翼を動かし、多自由度の運動を可能としている。2004年に開発したマンタロボットは弾性振動翼を2枚重ねたメカニズムで水中を羽ばたきながら宙返りなど滑らかな方向転換を可能とした(図16)1)。この系統で、2009年に東雲坂田鮫ロボット(図17)を開発した1)。羽ばたき翼と長い尾鰭でロボットは駆動され、速度を落とさずにその場で回頭できる運動能力を有する。一方で、水棲哺乳類の動きを模擬したロボットとして、2013年にイルカロボット(図18)を開発した1)。弾性振動翼を水平翼として尾鰭に使った点に特長がある。全長1mでモータ駆動である。
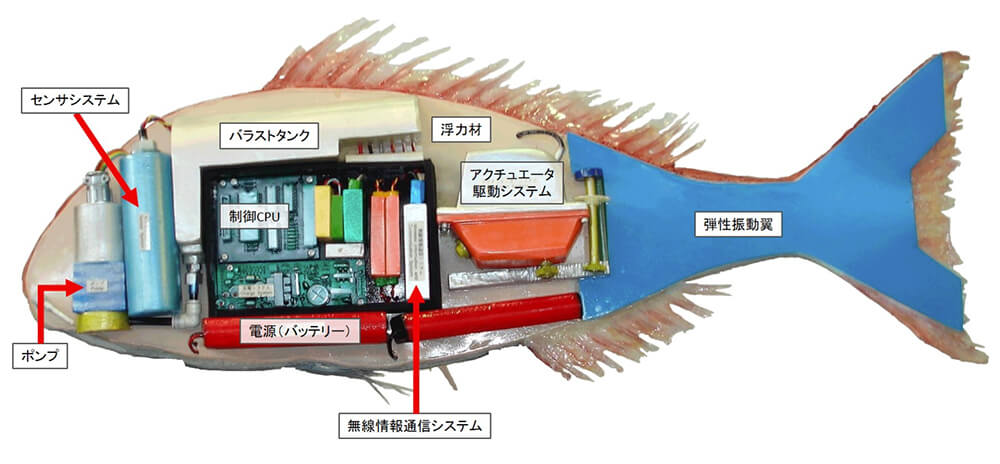
 図11 鯛ロボット 図11 鯛ロボット |
 図12 シーラカンスロボット 図12 シーラカンスロボット |
 図13 鯉ロボット“将軍” 図13 鯉ロボット“将軍” |
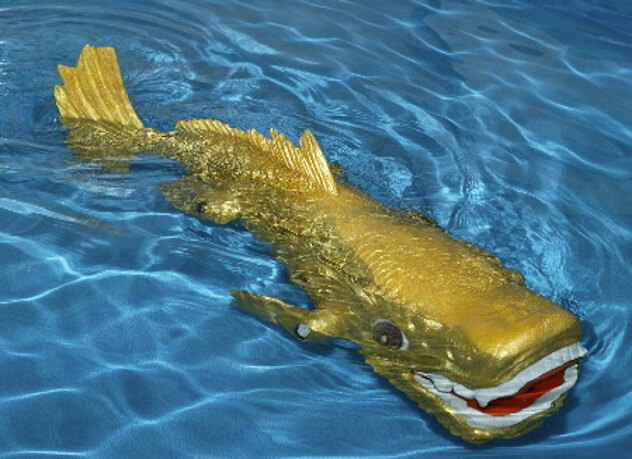 図14 金の鯱ロボット 図14 金の鯱ロボット |
 図15 鮪ロボット 図15 鮪ロボット |
 図16 マンタロボット 図16 マンタロボット |
 図17 東雲坂田鮫ロボット 図17 東雲坂田鮫ロボット |
 図18 イルカロボット 図18 イルカロボット |
5.海洋ロボットの課題と将来像
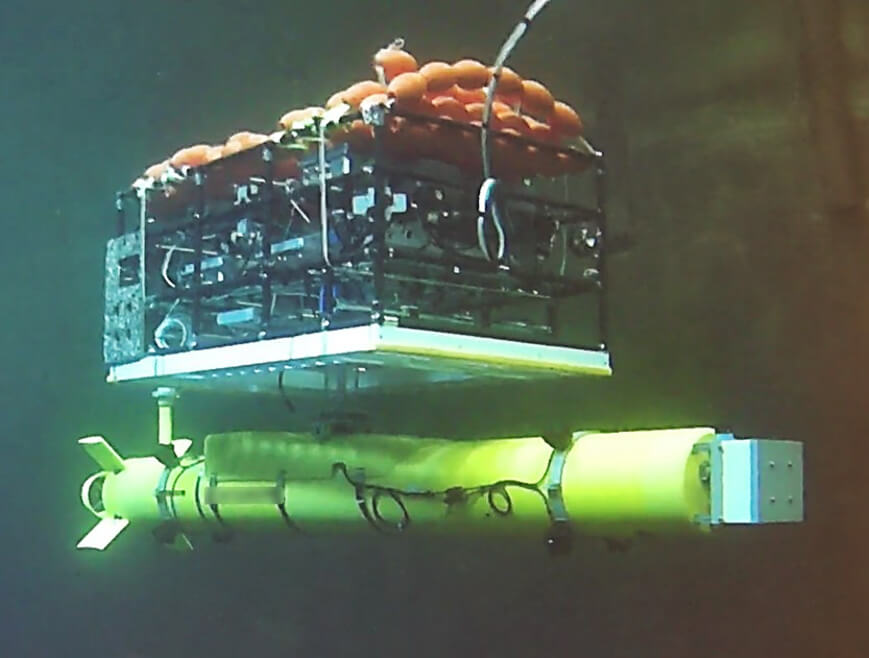
海洋ロボットの実ミッション上の課題と将来像をROV、AUVを中心に述べる。まず、ROVは自律性が高まり、自動作業性能の向上が図られると予想できる。その結果、ROVの海中作業能力が強化され、試料採取や機器の設置と回収を細やかに大パワー対応できる作業マニピュレータの開発が行われる。また、重作業用モジュールパーツの取り付け可能なROVの開発も期待される。他にも、ROVが無人洋上浮体とリンクすることにより洋上浮体の位置情報からROVの位置を自動認識し、洋上浮体の位置保持や移動性能と運動をリンクし、総合的にROV運動性能を高める協調系ROVシステムの開発も期待される。次にAUVが抱えている課題は、航続可能距離増加のための対策(電池、海中充電システム等)、 運動知能化(自己で周囲を認識して、判断し、行動できる機能の強化)、作業性強化(ロボットハンド装着し、ケーブルなしで海中作業)であり、これらを解決することによりAUVの次世代化が図られる。 リチウム電池、燃料電池等バッテリー技術の発展によりコンパクトで航続可能距離が長く、搭載されるセンサの高精度化により海中及び海底の細かな状況をセンシング可能で、人工知能技術によりセンシング情報から的確な判断を自動で行い、自律危険回避行動ができ、小型量子コンピュータ内蔵により収得データ容量の増大と知能性の強化されたものが実現されると思量する。さらに、翼をAUVに装着してグライディング効果により省エネ長距離航走を実現させることもできる10)。その他にも、海中非接触充電により海中でバッテリー充電を行うことによる効率的なAUVの運用(図19)、AUVの複数運用による海洋探査の効率化、マニュピュレータを装備したAUVによる海中及び海底の複雑な地形や環境での作業が期待される。
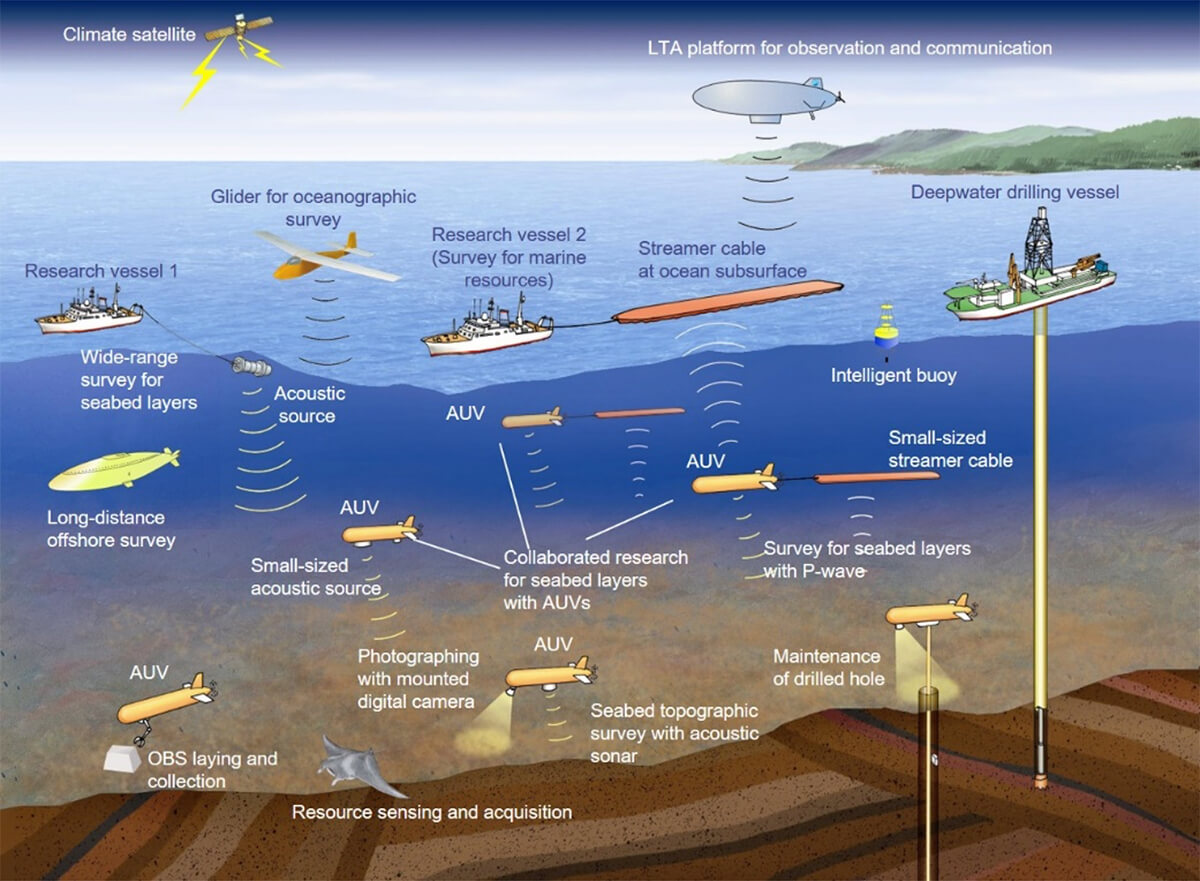
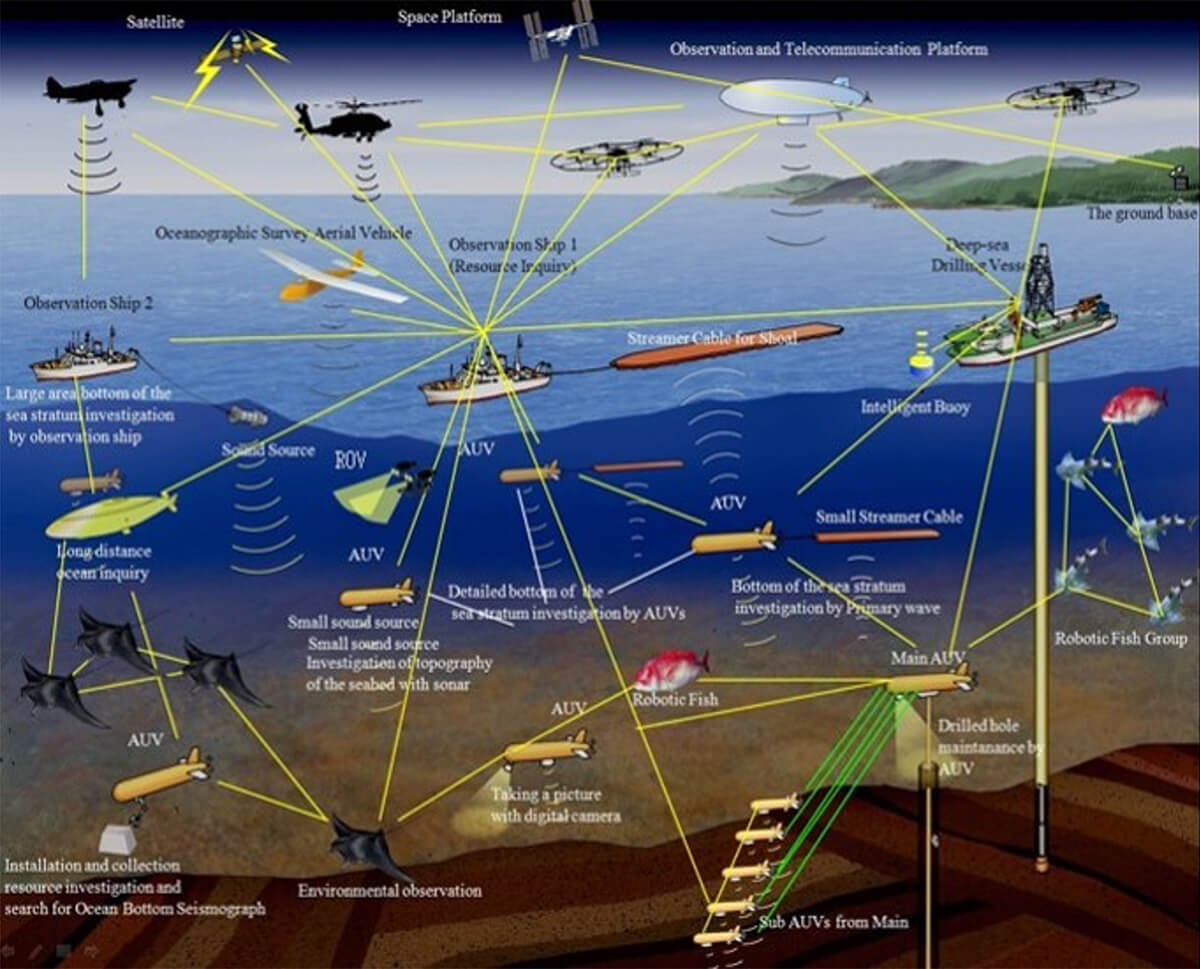
海洋ロボット全体の将来像は複数のAUVとASVとの連動による海中のロボット群による探査(図20)の実現であり10)、飛行ドローンや衛星との通信連動によりその有用性がさらに高まる(図21)11)。
参考文献
- 1)Ikuo Yamamoto,Practical Robotics and Mechatronics,IET (The Institution of Engineering and Technology, UK),Control,Robotics and Sensors Series 99,ISBN978-1-84919-968-1(2016)
- 4)山本郁夫, 滝本隆, 工科系のためのシステム工学, 力学・制御工学, 共立出版、ISBN978-4-320-08191-8, 2013年
- 7)Ikuo Yamamoto, “Elastic oscillating fin technology and its application to robotic fish”, Proc.ISFA, PARIS, France, pp.264-269, 2020
- 8)山本郁夫, 水井雅彦, 基礎から実践まで理解できるロボット・メカトロニクス, 共立出版, 2013.
- 9)山本郁夫, 伊藤高廣, 実例で学ぶ機械力学・振動学, コロナ社, , 2014.
- 10)IKUO YAMAMOTO, RESEARCH AND DEVELOPMENT OF PAST, PRESENT, AND FUTURE AUTONOMOUS UNDERWATER VEHICLE TECHNOLOGIES, THE BRITISH LIBRARY, ISBN090690486, 2007
- 11)山本郁夫, ロボット開発と海洋エネルギー利用促進、ながさき経済、5,No.307、2015
【著者紹介】
山本 郁夫(やまもと いくお)
長崎大学副学長・教授
■略歴
1983.3 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985.4 三菱重工本社技術本部、2004.4 海洋研究開発機構、2005.4 九州大学大学院総合理工学府教授、2007.4 北九州市立大学教授、2013.4 長崎大学教授、2019.4 同大学副学長。GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業(株)で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型飛行体や小型水中ロボット、本物そっくりにおよぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでPractical Roboticsの創出法に関する本など多く執筆している。内閣府総合海洋政策本部参与会議自律型無人潜水機(AUV)戦略PT有識者委員。