
山本 郁夫
1.海洋ロボットとは
海洋ロボットは、海で観測や作業を行うロボットの総称で、無人潜水機や自律船等が代表的である1)。無人潜水機は有人潜水機の救助やダイバーに代わる危険な水域ミッションを行うために生み出されたものが多く2)、水上の船や陸上の装置と通信、動力のやりとりを行いつつ遠隔操作可能なRemotely Operated Vehicle(以下「ROV」という)と、自らの判断、認識により自律的な行動を可能とする Autonomous Underwater Vehicle(以下「AUV」という)に分けられる3)。これまで、 ROVやAUVは主に海洋の調査に利用されてきたが、最近は洋上風力発電設備の施工・点検や海底油田・ガス田のパイプラインの整備等への適用も広まりつつある。また、船舶のドック入港前検査への活用も期待されている。自律船は広域海洋観測のニーズから近年盛んに開発されており、無人潜水機との連動システムも注目されている。
2.AUV、ROVの概要
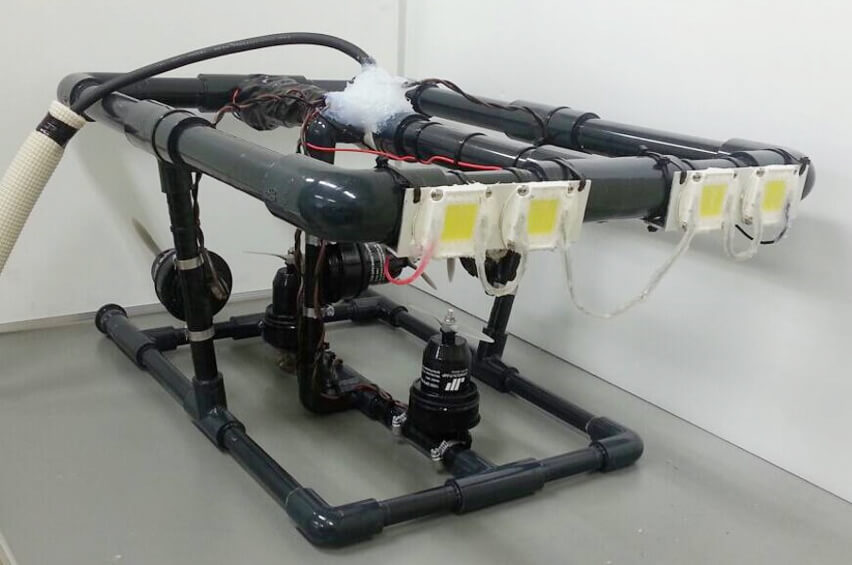
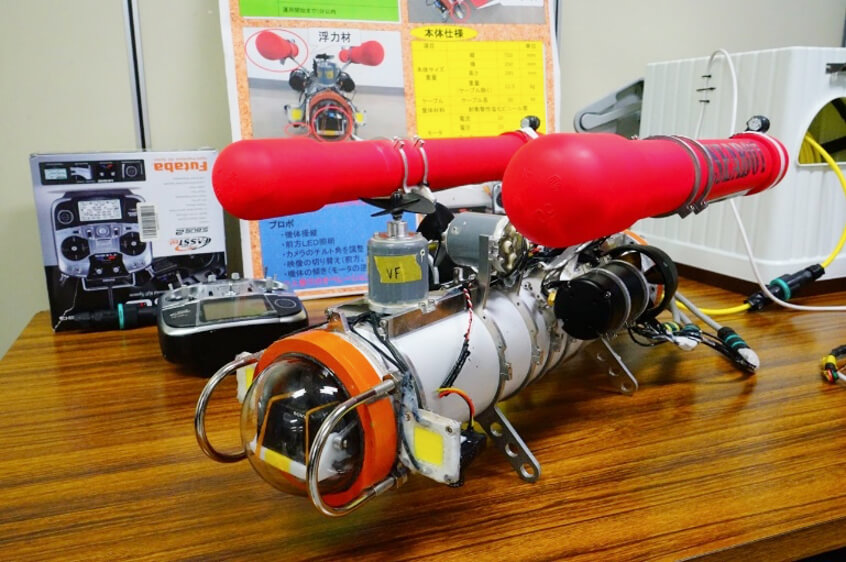
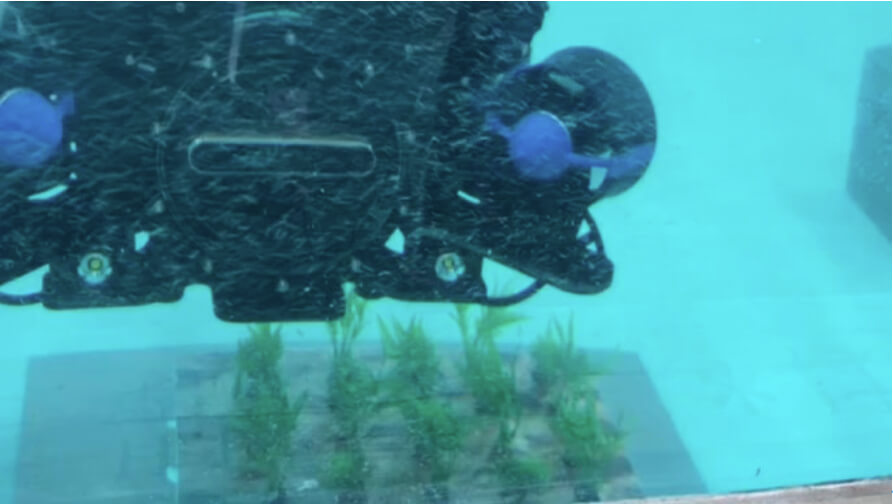
うらしま等の大型長距離自律航走AUVでは、多くの機器を搭載できるスペースを潜水機内に確保できるため、カメラ、ソナー、CTD計、採水器など海中環境、地形計測のための多くのセンサを搭載して多目的な海洋計測が可能である。自律運動を可能とするために、慣性航法装置、速度計、深度計、高度計、GPS等運動計測用センサも搭載できる。しかしながら、小型のAUVでは搭載ペイロードに制限があるため、計測目的を絞る必要がある。ROVは画像による海中モニタリングニーズが多く、センサとしてカメラと音響装置を用いる。図1、図2、図3に示す小型ROVでは小型カメラを搭載し、LEDで海中を明るく照らしながら海中の目標物を画像にて計測する。例えば、図4に示す様な浮体式洋上風車の海中下コーン構造部の状況を画像にて計測するのに有効であり、洋上風車コーン回りの環境計測やコーン最下部の状況をリアルタイムモニタリングが可能である(図5)。海中の電気伝導度、水温、圧力などの環境データの同時計測にはCTD計を用いるが、AUV、ROVのスペースとペイロードが確保できれば搭載できる。近年、ROVはAI(人工知能)によりAUV化される傾向にあり、図6に示すように藻場の位置を搭載のカメラにより計測し、AIがその位置を記憶して、再度ROVの計測地点自動回帰を可能としたり、潮流下で目標画像を捕捉し続けることが可能である。
AUV の制御系設計はエージェントネットベース4) の制御システムにおいてマクロ設計とミクロ設計を考える。マクロ設計ではそれぞれのAUVを一つのエージェントとして考え、各エージェントがAUV群システムの全体目標を達成するために自律的なオペレーションを行う。ミクロ設計ではそれぞれのソフトウェアコンポーネントをひとつのエージェントとして考え、AUVの目的達成のために自律的な協調を行う。このようなシステムにおいて、階層制御システムソフトウェア設計が重要である。
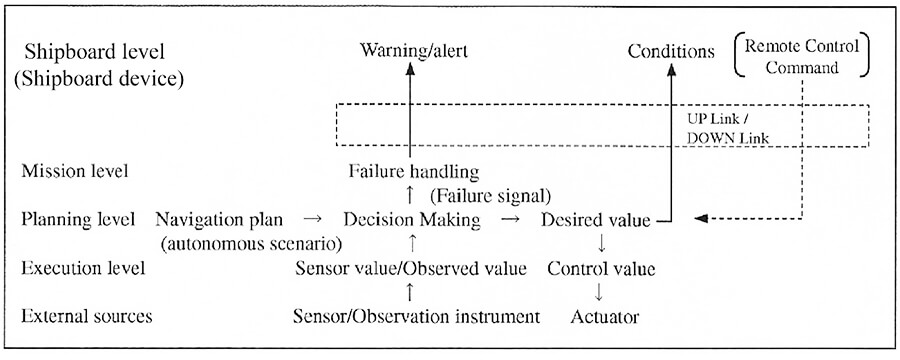
意思決定の階層化アーキテクチャは図7に示すようにミッションレベル、プランニングレベル、実行レベルの3層により構成される5) 。
ミッションレベルは、スタート、停止、自律・遠隔制御操作の切り替え、自律制御の実行コマンドの管理を含めた、AUVの制御を統合する。
プランニングレベルは船上装置からコントローラのタイプによってクラス分けされた細部の実行コマンドに 入力された実行コマンド自律シナリオの航行計画を決定する。
実行レベルは、アクチュエータ、センサ、パワー供給、観測装置などのプランニングレベルから与えられた情報を基に制御装置を動かし、センサ値、観測値、それぞれのアクチュエータからのオペレーション状態をプランニングレベルに送信する。



3.自律船の概要
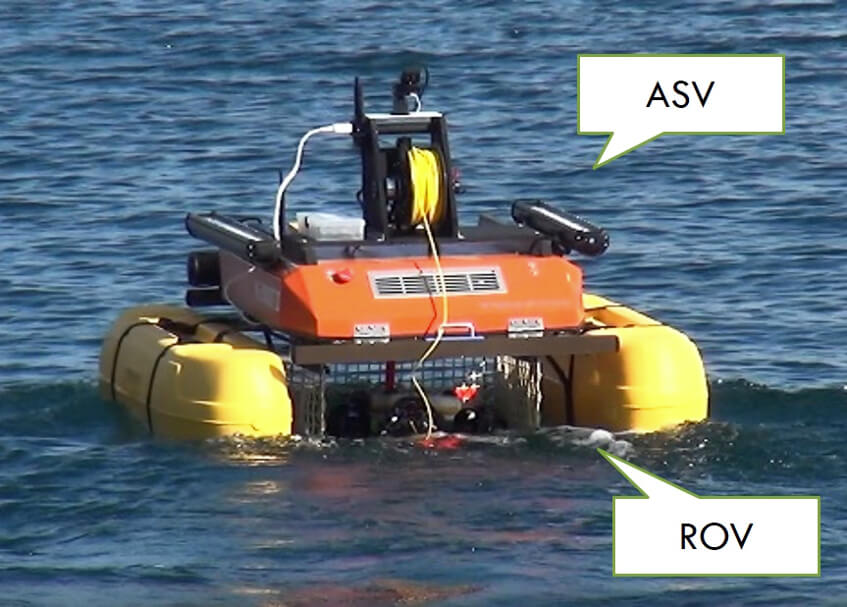
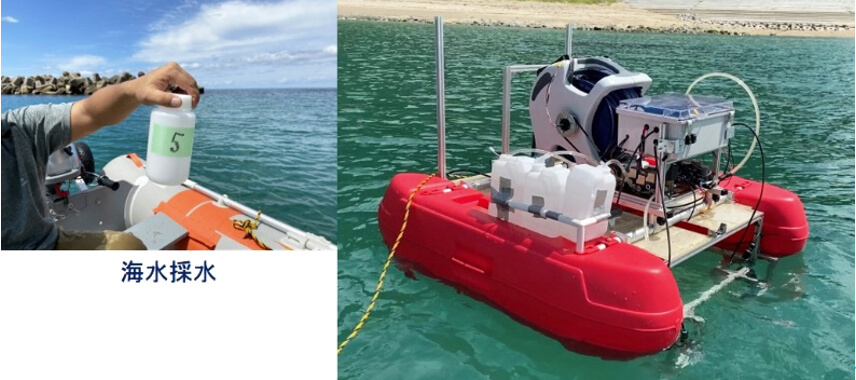
自律船は自動で設定航路に従って航行し、海洋観測と作業を行う船舶である。以下「ASV」(Autonomous Surface Vehicle)と称す。ASVは無人潜水機や飛行ドローンを搭載して、複合的なモビリティ群でミッションを遂行する場合もある。図8はROV搭載のASVであり、海ごみ観測や元寇沈船探査にも活用された6)。また、図9に示すような船型ロボットにより採水装置を海中に下して海水を採水し、環境汚染調査、赤潮プランクトンや海洋マイクロプラスチックの把握に用いられる。
次回に続く-
参考文献
- Ikuo Yamamoto,Practical Robotics and Mechatronics,IET (The Institution of Engineering and Technology, UK),Control,Robotics and Sensors Series 99,ISBN978-1-84919-968-1(2016)
- 山本郁夫, 「しんかい6500・かいこう」の開発, 日本造船学会誌TECHNO MARINE 885号, pp.107-110, 2005年
- 山本郁夫, 日本の水中ビークル技術の技術史 うらしま, 日本造船学会誌TECHNO MARINE 883号, pp.67-70, 2005年
- 山本郁夫, 滝本隆, 工科系のためのシステム工学, 力学・制御工学, 共立出版、ISBN978-4-320-08191-8, 2013年
- Ikuo Yamamoto, Design of Agent-Net Based Control System of Marine System, Proc. IFAC MCMC, A-3, No.3, pp.1-6, 2006
- Ikuo Yamamoto, Akihiro Morinaga and Yasunori Izumi, Development of ASV/ROV joint mobility vehicle for ocean investigation, Proceedings of the Thirty-third (2023) International Ocean and Polar Engineering Conference, Ottawa, Canada, June 19-23, 2023, ISBN 978-1-880653-80-7; ISSN 1098-6189, pp.1130-1134, Jun., 2023
【著者紹介】
山本 郁夫(やまもと いくお)
長崎大学副学長・教授
■略歴
1983.3 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985.4 三菱重工本社技術本部、2004.4 海洋研究開発機構、2005.4 九州大学大学院総合理工学府教授、2007.4 北九州市立大学教授、2013.4 長崎大学教授、2019.4 同大学副学長。GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業(株)で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型飛行体や小型水中ロボット、本物そっくりにおよぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでPractical Roboticsの創出法に関する本など多く執筆している。内閣府総合海洋政策本部参与会議自律型無人潜水機(AUV)戦略PT有識者委員。