
マイクロデバイス事業部
押尾 政宏
1. ジャイロセンサーとは
ジャイロは「角速度」を検出するセンサーであり、角速度センサー、レートセンサー、ジャイロスコープとも呼ばれる。ジャイロとは、ギリシャ語で「回転」を意味するジャイロ(γυροσ)を語源とする。ジャイロが検出する「回転」とは、慣性空間に対する回転、すなわち方位変化で、通常ジャイロは移動物体そのものに取り付けて使用する。回転センサーというと、ロータリーエンコーダーの様に回転している部位を、基準となる固定部位より検知して回転数や回転角度をみるセンサーも含まれるが、このような回転センサーはジャイロとはメカニズムも用途も異なる。ジャイロは一般の人々には馴染みのない「角速度」を検出するセンサーであるため前述の回転センサーや「加速度」センサーと混同されやすい。この理由として、「角速度」が人間の感じる「角加速度」と異なる物理量であり、一般の人々にはイメージしにくいことが挙げられる。
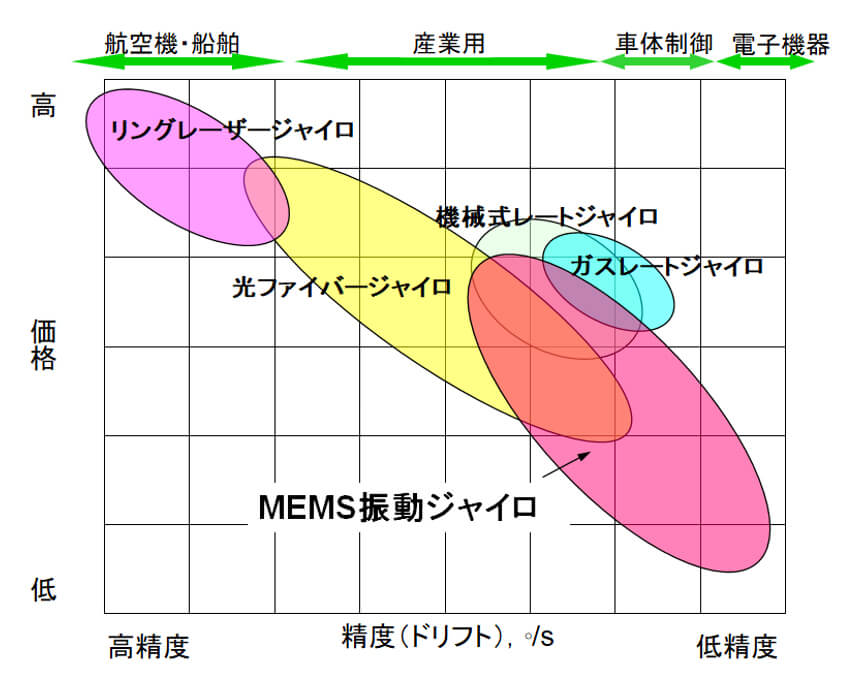
現在、産業・コンシューマ市場にて用いられる各種ジャイロセンサーの精度と価格の関係を図1-1に示す。価格の高い方から、リングレーザージャイロ(RLG)、光ファイバージャイロ(FOG)、MEMS(Micro Electro Mechanical Systems)振動ジャイロなどが実用化されている。
近年ではスマートフォンや車載ナビゲーションへの応用をきっかけに、MEMS振動ジャイロの小型・低コスト化や加速度センサー等の他のセンサーと組み合わせた多機能化が進んでいる。
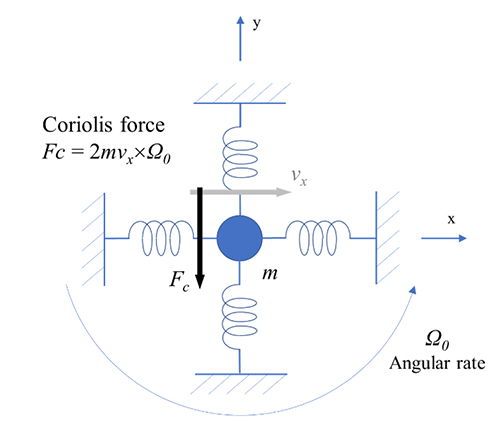
本稿で紹介するダブルT型水晶ジャイロは振動ジャイロに分類され、低コスト化や小型化に適している。図1-2はバネと質点で表した振動ジャイロの力学モデルである。図に示すような質量mを持つ質点をx方向に振動させている系を考える。この系に角速度Ω0の回転が加わったときに、速度vxで運動する質点には、式(1.1)に示すコリオリの力 Fc がy方向に作用する。
Fc = 2m (vx × Ω0 ) (1. 1)
このような回転時に発生するコリオリの力Fcは、振動方向と回転軸のそれぞれに直交する方向に発生し、その大きさは振動速度vxと回転角速度Ω0に比例する。したがって、何らかの方法によって、質点mの動きを観測すること、例えば、y方向に取り付けられたバネによってy方向の振動を観測することができれば、角速度Ω0を知ることができる。つまり、振動ジャイロでは、まず、ある方向に一定の振動=駆動振動を励振させて振動速度を発生させることと、次に、その駆動振動と直角方向の振動=検出振動を計測することの2つが必要である。このようなメカニズムは人間の方向の感覚とは根本的に異なるものである。人間は主に三半規管によって方向の変化を認識している。三半規管は管内の本来止まっているリンパ液の慣性を利用して「角加速度」を検出しているが、振動ジャイロの場合には、振動しているものに働くコリオリの力によって「角速度」を検出している。センサーを使用するにあたっては、この様な性質を踏まえることが重要である。
2. ジャイロセンサーのアプリケーション例
図2-1に示す様に、ジャイロセンサーの性能やサイズによってアプリケーションは多種多様である。従来は、宇宙船や航空機、船舶などの移動体や産業機器における姿勢・方向検出といった用途が主なアプリケーションであった。しかし、小型で安価なMEMS振動ジャイロの台頭に伴い、カーナビゲーションや家庭用ゲーム機のモーションセンシングなどへの普及が近年急速に進んだ。以下に代表例として、「カメラの手ブレ補正」と「ロボット掃除機の走行制御」におけるジャイロセンサーの役割と特性による違いについて説明する。

2.1 カメラの手ブレ補正
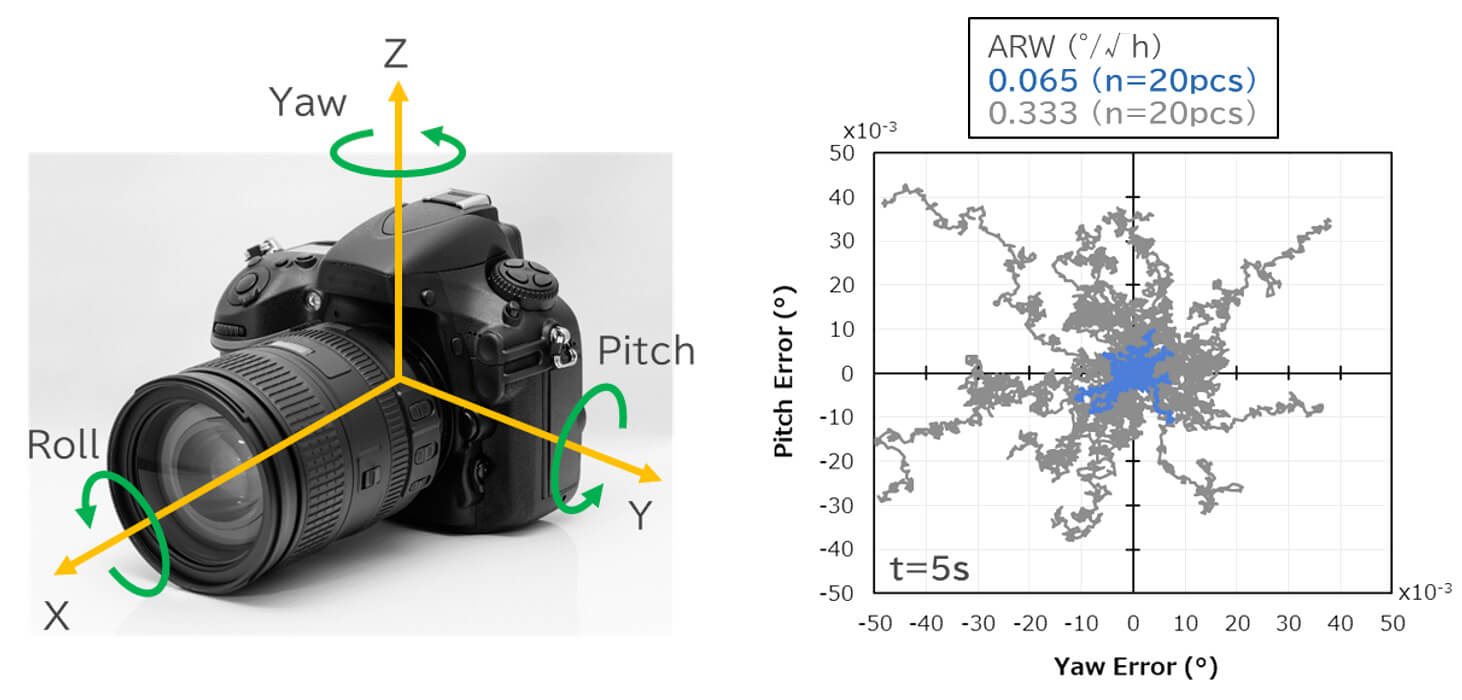
撮影時にカメラの揺れによって写真や動画がぼやけてしまうこと(手ブレ)を防ぐため、ジャイロセンサーを用いた手ブレ補正がおこなわれる。カメラの座標軸を図2-2の様に定義したとき、Z軸周りの回転(Yaw)とY軸周りの回転(Pitch)が手ブレに大きく影響する。そこで、ジャイロセンサーによりこれらの回転角度をリアルタイムに検出し、その情報をもとにカメラ内部のアクチュエーターを制御することで手ブレを抑制できる。厳密にはジャイロセンサーは回転の角速度を検出しているため、角速度を時間で積分して回転角度を算出するが、その角度精度はジャイロセンサーの特性に依存する。
例として、積分時間5秒におけるYawとPitch誤差のシミュレーション結果を図2-2に示した。積分時間はカメラの露光時間に相当し、暗い場所での撮影時に露光時間は長くなる。比較しているセンサー特性は、角度ランダムウォーク(ARW: Angle Random Walk)と呼ばれるジャイロセンサーのホワイトノイズを表わす特性で、3章でも後述する様にジャイロセンサーにおける重要特性の一つである。シミュレーション結果より、ARWが小さく低ノイズであるほど、角度誤差も小さくなることが分かる。
2.2 ロボット掃除機の走行制御
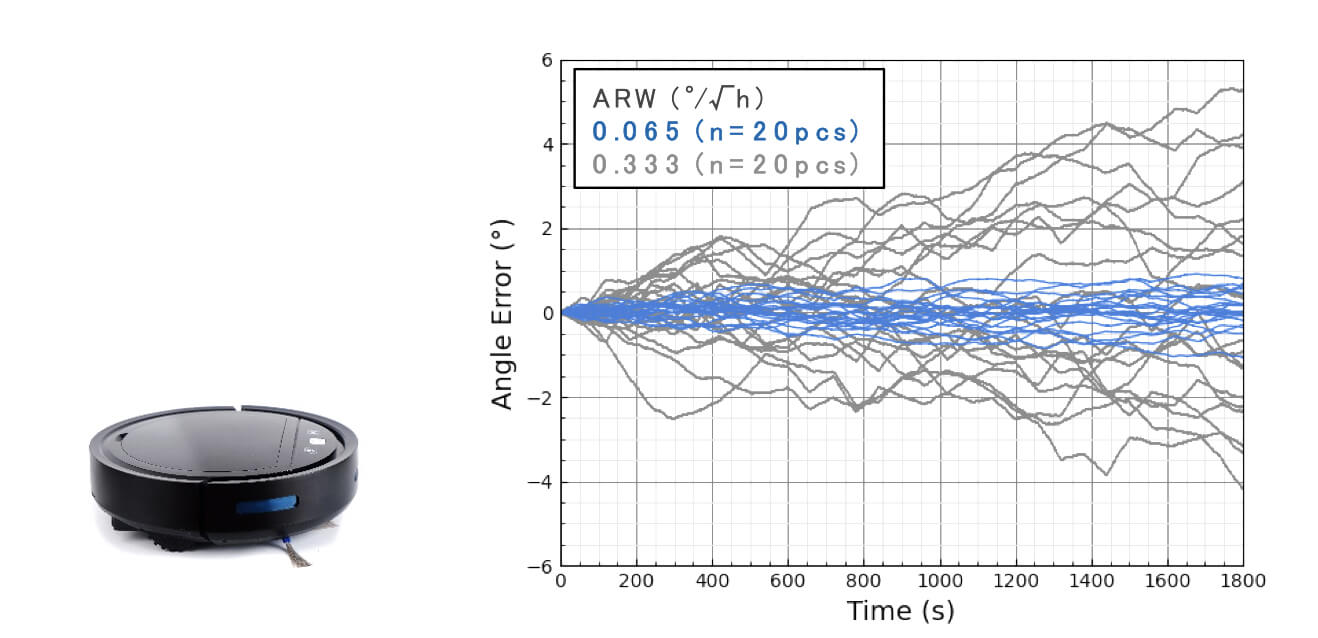
部屋をくまなく掃除するため、ロボット掃除機では事前に走行ルートが設定される場合が多い。目標とするルートに沿った走行を実現するには、ロボット掃除機がどの方向に進んでいるかを正確に把握して制御する必要があり、進行方向を検出する用途としてジャイロセンサーが用いられる。カメラの手ブレ補正と同様に、ジャイロセンサーで検出したロボット掃除機の角速度を積分することで、進行方向を表わす角度が得られる。
図2-3に、積分時間1800秒(30分)における角度誤差のシミュレーション結果を示す。積分時間はロボット掃除機の走行時間に相当し、部屋の広さに応じて走行時間は長くなる。本計算では積分時間が長いため、ARWに加えて、3章で後述するバイアス安定性(BI: Bias Instability)も考慮してシミュレーションを実施した。更に、BIによるセンサー出力のずれ(オフセット)をロボット掃除機の停止時にゼロへ補正する前提とした。2.1節と同様に、ARWが小さく低ノイズであると角度誤差も小さいことが分かる。
次回に続く-
【著者紹介】
押尾 政宏(おしお まさひろ)
セイコーエプソン株式会社 マイクロデバイス事業部 TD商品開発部 課長
■略歴
- 2000年電気通信大学 機械制御工学科 修士課程修了
- 2000年セイコーエプソン株式会社 入社
弾性表面波デバイスの研究開発に従事 - 2009年水晶ジャイロセンサーの開発設計に従事
- 2020年TD商品開発部 課長